一种移动机器人及其导光结构的制作方法
1.本技术涉及移动机器人技术领域,具体涉及一种移动机器人及其导光件。
背景技术:
2.随着市场上室内移动机器人的普及,移动机器人已逐步应用于大众服务场景中,例如,餐厅、酒店、写字楼等室内场景。移动机器人头部环绕的发光结构与使用者可实现互动,通常该发光结构中导光件的入光面与出光面相对于灯带的高度相同或基本相同,从而通过导光件发出的光线不够均匀。
技术实现要素:
3.本技术旨在提供一种移动机器人及其导光件,通过设置相互错位的入光面与出光面,使得导光件发出均匀的光线。
4.根据本技术的第一方面,本技术提供了一种移动机器人的导光件,所述导光件具有入光部,出光部,导光部以及固定部,所述导光部连接在入光部与出光部之间,所述固定部设置在所述入光部的底部,用于固定安装所述导光件;所述入光部上形成有入光面,所述出光部上形成有出光面;沿入光面至出光面的方向,所述入光面与出光面错位设置。
5.进一步地,沿垂直于入光面至出光面的方向,所述导光部倾斜的连接在入光部与出光部之间,所述导光部的高端连接在所述出光部上,所述导光部的低端连接在所述入光部上。
6.进一步地,所述出光面的面积大于入光面的面积。
7.进一步地,所述导光件还具有安装部,以及连接在安装部与入光部之间的连接部;所述安装部具有安装面,所述安装面朝向所述入光面且平行于所述入光面,所述安装面用于安装光源。
8.进一步地,所述固定部包括多个安装柱,所述多个安装柱沿所述导光件的长度方向依次间隔的设置在所述连接部的底部。
9.进一步地,所述入光面与出光面相互平行。
10.进一步地,所述导光件为弧形条状导光件,所述光源为弧形条状光源。进一步地,还包括:外罩,所述外罩设置在所述出光部上。
11.进一步地,所述外罩的内侧还设置有向其内侧延伸的卡持槽,所述卡持槽的槽口朝向所述出光部;所述出光部上还设置有卡持凸部,所述卡持凸部沿垂直于入光面至出光面的方向向上延伸,所述卡持凸部卡持在所述卡持槽中。
12.根据本技术的第二方面,本技术还提供了一种移动机器人,包括:所述的移动机器人的导光结构。
13.依据本技术所提供的移动机器人及其导光件,该导光件中的出光面与入光面错位设置,从而使得出光面发散的光线更加均匀、柔和。如此,应用到移动机器人上后可提高移动机器人的美观度。
附图说明
14.图1为本技术提供的导光结构的立体图;
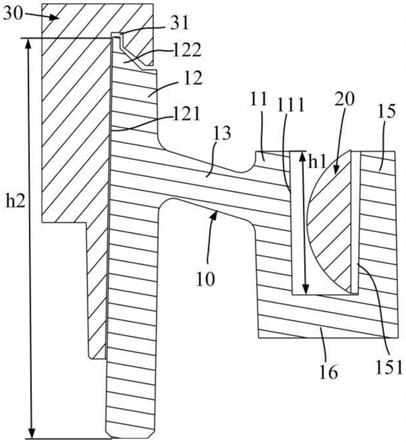
15.图2为图1中a
‑
a处的剖面图;
16.图3为图1的爆炸图;
17.图4为本技术提供的安装有光源的导光件在一视角下的立体图;
18.图5为本技术提供的安装有光源的导光件在另一视角下的立体图。
具体实施方式
19.下面通过具体实施方式结合附图对本发明作进一步详细说明。其中不同实施方式中类似元件采用了相关联的类似的元件标号。在以下的实施方式中,很多细节描述是为了使得本技术能被更好的理解。然而,本领域技术人员可以毫不费力的认识到,其中部分特征在不同情况下是可以省略的,或者可以由其他元件、材料、方法所替代。在某些情况下,本技术相关的一些操作并没有在说明书中显示或者描述,这是为了避免本技术的核心部分被过多的描述所淹没,而对于本领域技术人员而言,详细描述这些相关操作并不是必要的,他们根据说明书中的描述以及本领域的一般技术知识即可完整了解相关操作。
20.另外,说明书中所描述的特点、操作或者特征可以以任意适当的方式结合形成各种实施方式。同时,方法描述中的各步骤或者动作也可以按照本领域技术人员所能显而易见的方式进行顺序调换或调整。因此,说明书和附图中的各种顺序只是为了清楚描述某一个实施例,并不意味着是必须的顺序,除非另有说明其中某个顺序是必须遵循的。
21.本文中为部件所编序号本身,例如“第一”、“第二”等,仅用于区分所描述的对象,不具有任何顺序或技术含义。而本技术所说“连接”、“联接”,如无特别说明,均包括直接和间接连接(联接)。
22.本技术提供的移动机器人及其导光结构中,该导光结构主要用于安装在移动机器人的头部,用于在该移动机器人与使用者进行互动时,进行不同频率的闪烁。当然,该导光结构也不限于安装在移动机器人的头部,也可以是其他需要与使用者互动的部位。本实施例以该导光结构安装在移动机器人的头部为例进行说明。
23.实施例一、
24.参见图1
‑
图5所示,本实施例提供的移动机器人的导光结构主要包括:导光件10,以及透明护罩30。
25.导光件10用来引导光线的散射方向,使得发出的光线更加均匀、柔和。优选的实施方式中,该导光件10是采用透光性的塑胶材质制作而成。该导光件10具有入光部11,出光部12,导光部13以及固定部14,导光部13连接在入光部11与出光部12之间,固定部14设置在入光部11的底部,该固定部14用于固定安装该导光件10。具体的是,该固定部14与移动机器人本体连接。本实施例中,在入光部11上形成有入光面111,光源20所发出的光线朝向入光面111,入光面111用于使光线进入到导光部13,导光部13用于将从入光面111进入的光线导向至出光面121,在出光部12上形成有出光面121,出光面121用于使得光线发散。
26.沿入光面111至出光面121的方向,入光面111与出光面121错位设置,即,沿入光面111至出光面121的方向,入光面111与出光面121的投影不重合,或者,部分重合。本实施例中,入光面111与出光面121的投影部分重合,进而使得光源20与出光面121错位设置,如此,
不仅使得出光面121发散的光线更加均匀、柔和,还可避免通过出光面观察到灯珠,进一步提高该移动机器人的美观度。
27.具体而言,沿垂直于入光面111至出光面121的方向,导光部13倾斜的连接在入光部11与出光部12之间,即,该导光部13的高端(倾斜方向上较高的一端)连接在出光部12上,该导光部13的低端(倾斜方向上较高的一端)连接在入光部11上。当然,在其他实施例中,导光部13的倾斜方向、角度也可不同,例如,导光部的高端连接在入光部11上,导光部13的低端连接在出光部12上,具体根据实际需要进行设定。
28.本实施例中,入光面111与出光面121相互平行设置,进而可减少光线传播的损耗。当然,在其他实施例中,入光面111所在平面与出光面121所在平面也可是具有一定夹角的,具体根据实际需要设置。
29.光源20可在接通电源的状态下发光,光源20通过不同频率的闪烁方式与使用者实现互动。该光源20所发出的光线朝向入光面111,该光线经过导光部13的导向、出光面121的发散后射出。
30.本实施方式中,沿垂直于入光面111至出光面121的方向,光源20的高度基本与入光面111的高度h1相同,出光面121的高度h2高于入光面111的高度h1,从而在入光面111与出光面121宽度相同的情况下,出光面121的面积大于入光面111的面积,使得出光面121发散的光线更加均匀、柔和。如此,应用到移动机器人上后可提高移动机器人的美观度。
31.外罩30设置在出光部12上,具体的是,外罩30罩扣在出光部12的出光面121上,对出光面121起到保护的作用,避免磕碰损坏出光面121。
32.本实施方式中,外罩30可以透光,以使经出光面121发散的光线射出。该外罩30具体可以采用透明式、半透明式、磨砂面等结构。
33.该外罩30的内侧还设置有卡持槽31,该卡持槽31向该外罩30的内侧延伸,该卡持槽31的槽口朝向出光部12。外罩30的内侧意指外罩30朝向导光件10的一侧。相应的,在出光部13上还设置有卡持凸部122,该卡持凸部122沿垂直于入光面111至出光面121的方向向上延伸,该卡持凸部122卡持在卡持槽31中,以使外罩罩扣在出光面121上。
34.一种实施例中,如图3所示,在卡持槽31的外侧还设置有多个第一卡扣件31,在外罩30的内侧位于卡持槽31的下方还设置有多个第二卡扣件32,相应的,在卡持凸部122上还设置有对应于第一卡扣件31的第一卡扣部17,在出光面上还相应的设置对应于第二卡扣件32的第二卡扣部(图中未示出),第一卡扣件31与第一卡扣部17卡接连接,第二卡扣件32与第二卡扣部卡接连接,以使罩扣在导光件10上的外罩30固定在导光件10上,采用卡接连接的方式,便于各零部件的组装、拆卸。
35.一种实施例中,光源20为灯带,该灯带由多个led灯珠沿灯带的长度方向依次布设制作而成。
36.在一实施例中,前述的导光件10还具有安装部15以及连接部16,该连接部16连接在安装部15与入光部11之间,该安装部15具有安装面151,该安装面151朝向入光面111且平行于入光面111,该安装部15的安装面151用于安装光源。
37.本实施例中,入光部11、出光部12、导光部13、固定部14、安装部15以及连接部16形成为一体式结构的导光件10,可通过模具进行制作,简化制作方式,适于批量生产。
38.本技术中,前述的固定部17由多个安装柱组成,所有的安装柱沿导光件10的长度
方向依次间隔的设置在连接部16的底部。
39.如图1、图3、图4、图5所示,前述的导光件10为弧形条状导光件,相应的光源20为弧形条状光源,并且,为使透明护罩30适配于安装,该透明护罩30也相应的设置为弧形形状。
40.实施例二、
41.本实施例提了一种移动机器人,该移动机器人包括实施例一所述的移动机器人的导光结构,该导光件通过固定部17安装在该移动机器人的头部,用于通过不同频率的闪烁实现与使用者的互动。
42.该导光件的所有功能和特征已在实施例一中详细阐述,在此不再赘述。
43.综上所述,本技术提供的移动机器人及其导光结构中,该导光结构中的出光面与入光面错位设置,从而使得出光面发散的光线更加均匀、柔和。如此,应用到移动机器人上后可提高移动机器人的美观度。
44.以上内容是结合具体的实施方式对本技术所作的进一步详细说明,不能认定本技术的具体实施只局限于这些说明。对于本技术所属技术领域的普通技术人员来说,在不脱离本技术发明构思的前提下,还可以做出若干简单推演或替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1