一种智慧灯杆停车管理系统的制作方法
1.本发明涉及停车管理技术领域,具体为一种智慧灯杆停车管理系统。
背景技术:
2.随着物联网、下一代互联网、云计算等新一代信息技术广泛应用,智慧城市新政频出,提供更有利于城镇居民居住的环境,智慧灯杆也在其改进范围内,智慧灯杆是在原有灯杆照明功能的基础上,加入自动化控制的技术,使智慧灯杆更适于司机的使用,智慧灯杆停车管理系统是一种方便车辆在路边停车的系统,在进行停车时通过灯杆发出的光,进而方便驾驶者观察周围的环境,尤其在较暗的环境内,减少驾驶者停车失误的情况。
3.经检索,专利公开号为cn108765593a公开了一种智慧灯杆停车管理系统,包括:依次连接的摄像装置、图像处理识别单元和主控制器,与主控制器网络连接的服务器;摄像装置设置在路灯灯杆上,用于采集车位视频信息,并将车位视频信息传输至图像处理识别单元;图像处理识别单元用于识别车位视频信息中的停车位,以及识别车位视频信息中的车牌号;图像处理识别单元将停车位和车牌号发送至主控制器;主控制器通过判断停车位中是否有车牌号,从而判断停车位中是否有车辆,并根据判断结果生成停车位信息,并将停车位信息传输至服务器。本发明通过对停车位信息网络化,为驾驶员提供实时查询停车位信息,利于驾驶员方便快捷地停车。
4.其在使用的过程中,由于路边的环境较为复杂,驾驶者不方便及时观察后方的车辆情况,并且由于车辆的高低不同,存在很大的光亮照射不到的区域,不便于驾驶者停车。
技术实现要素:
5.(一)解决的技术问题
6.针对现有技术的不足,本发明提供了一种方便及时观察后方的车辆情况,减少光亮照射不到的区域,便于驾驶者停车的智慧灯杆停车管理系统。
7.(二)技术方案
8.为实现上述目的,本发明提供如下技术方案:一种智慧灯杆停车管理系统,包括底板和配电柜,所述底板的顶端右部安装有防护杆,所述防护杆为方管状,所述防护杆的内部安装有第一电动推杆,所述第一电动推杆的输出端固定连接有长板,所述长板的底端右部固定连接有限位板,所述防护杆的右端固定连接有导轨,所述导轨的右部上下滑动配合有滑块,所述滑块的右端和所述长板的左端底部固定连接,所述防护杆的左端中部安装有第一反射镜,所述长板的顶端右部固定连接有第一连板,所述第一连板的前端中部通过轴转动连接有第二电动推杆,所述第二电动推杆的输出轴端通过轴转动连接有第二连板,所述第二连板的底端固定连接有纵板,所述纵板的底端安装有照明灯,所述纵板的前端中部和所述长板的后端中部通过轴转动连接,所述长板的顶端左部安装有第三电动推杆,所述第三电动推杆的输出轴端固定连接有转接板,所述转接板的后端安装有伺服电机,所述伺服电机的输出轴端固定连接有第二反射镜,所述转接板的左端上部安装有滑动板,所述滑动
板的右端和所述长板的左端上下滑动配合,所述第一电动推杆、第二电动推杆、第三电动推杆和伺服电机均和所述配电柜电连接。
9.优选的,所述配电柜内部设置有控制面板,所述第一电动推杆、第二电动推杆、第三电动推杆和伺服电机均和控制面板电连接,所述配电柜内部安装有电源。
10.优选的,所述底板的底端固定连接有减震垫。
11.优选的,所述转接板的左端底部安装有用于感应车辆高度的第一传感器,所述第一传感器和控制面板电连接。
12.优选的,所述底板的底端左部和底端右部安装有用于感应车辆的第二传感器,所述第二传感器和控制面板电连接。
13.优选的,所述防护杆的左端底部安装有用于感应车辆位置的第三传感器,所述第三传感器和控制面板电连接。
14.优选的,所述防护杆的左端上部安装有语音提示器,所述语音提示器和控制面板电连接。
15.优选的,所述配电柜内部安装有远程传输模块,所述远程传输模块和语音提示器电连接。
16.(三)有益效果
17.与现有技术相比,本发明提供了一种智慧灯杆停车管理系统,具备以下有益效果:
18.该智慧灯杆停车管理系统,通过第一电动推杆带动长板移动,进而调整长板的高度,之后通过第二电动推杆带动第二连板、纵板和照明灯旋转,进而调整照明灯的角度,进而调整照明灯的照射角度,进而便于观察车辆后部的环境,并通过第一反射镜和第二反射镜配合,进而方便观察周围的环境,通过第二电动推杆带动第二反射镜调整角度,进而方便观察指定的角度,并通过伺服电机带动第二反射镜旋转角度,进而调整第二反射镜的观察空间,达到方便及时观察后方的车辆情况,减少光亮照射不到的区域,便于驾驶者停车的效果。
附图说明
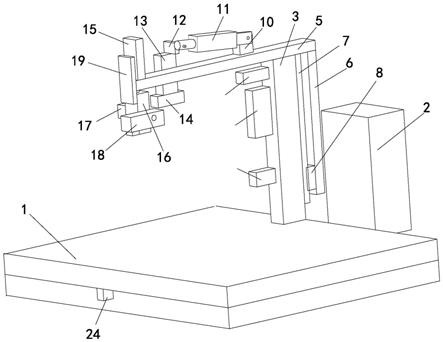
19.图1为本发明结构示意图;
20.图2为本发明的主视结构示意图;
21.图3为本发明的电路示意图。
22.图中:1、底板;2、配电柜;3、防护杆;4、第一电动推杆;5、长板;6、限位板;7、导轨;8、滑块;9、第一反射镜;10、第一连板;11、第二电动推杆;12、第二连板;13、纵板;14、照明灯;15、第三电动推杆;16、转接板;17、伺服电机;18、第二反射镜;19、滑动板;20、控制面板;21、电源;22、减震垫;23、第一传感器;24、第二传感器;25、第三传感器;26、语音提示器;27、远程传输模块。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他
实施例,都属于本发明保护的范围。
24.实施例:
25.请参阅图1
‑
3,一种智慧灯杆停车管理系统,包括底板1和配电柜2,底板1的顶端右部安装有防护杆3,防护杆3为方管状,防护杆3的内部安装有第一电动推杆4,第一电动推杆4的输出端固定连接有长板5,长板5的底端右部固定连接有限位板6,防护杆3的右端固定连接有导轨7,导轨7的右部上下滑动配合有滑块8,滑块8的右端和长板5的左端底部固定连接,防护杆3的左端中部安装有第一反射镜9,长板5的顶端右部固定连接有第一连板10,第一连板10的前端中部通过轴转动连接有第二电动推杆11,第二电动推杆11的输出轴端通过轴转动连接有第二连板12,第二连板12的底端固定连接有纵板13,纵板13的底端安装有照明灯14,纵板13的前端中部和长板5的后端中部通过轴转动连接,长板5的顶端左部安装有第三电动推杆15,第三电动推杆15的输出轴端固定连接有转接板16,转接板16的后端安装有伺服电机17,伺服电机17的输出轴端固定连接有第二反射镜18,转接板16的左端上部安装有滑动板19,滑动板19的右端和长板5的左端上下滑动配合,第一电动推杆4、第二电动推杆11、第三电动推杆15和伺服电机17均和配电柜2电连接。
26.进一步的,配电柜2内部设置有控制面板20,第一电动推杆4、第二电动推杆11、第三电动推杆15和伺服电机17均和控制面板20电连接,配电柜2内部安装有电源21;通过控制面板20控制第一电动推杆4、第二电动推杆11、第三电动推杆15和伺服电机17,进而方便使用者控制第一电动推杆4、第二电动推杆11、第三电动推杆15和伺服电机17的运行,底板1的底端固定连接有减震垫22,减震垫22为橡胶垫,通过减震垫22的减震效果较好,减少长期使用有底板1和地面之间出现缝隙后,车辆和底板1之间的磕碰损伤,转接板16的左端底部安装有用于感应车辆高度的第一传感器23,第一传感器23和控制面板20电连接;通过第一传感器23感应车辆的高度,进而方便控制第一电动推杆4的伸出高度,进而便于自动控制照明灯14的高度,底板1的底端左部和底端右部安装有用于感应车辆的第二传感器24,第二传感器24和控制面板20电连接;通过第二传感器24感应是否有车辆存在此处,进而便于进行提醒周围的车辆此处存在车辆,防护杆3的左端底部安装有用于感应车辆位置的第三传感器25,第三传感器25和控制面板20电连接;通过第三传感器25检测车辆的位置,进而减少车辆和防护杆3相撞的情况,防护杆3的左端上部安装有语音提示器26,语音提示器26和控制面板20电连接;通过语音提示器26提醒驾驶者车辆的位置,减少车辆和防护杆3相撞的情况,并且提醒周围的车辆此处是否存在车辆,达到进一步提高实用性的效果,配电柜2内部安装有远程传输模块27,远程传输模块27为无线传输模块,远程传输模块27和语音提示器26电连接;通过使用者连接后,通过发送信号控制第一电动推杆4、第二电动推杆11、第三电动推杆15和伺服电机17的运行,达到进一步便于使用者操作的效果;通过第一电动推杆4带动长板5移动,进而调整长板5的高度,之后通过第二电动推杆11带动第二连板12、纵板13和照明灯14旋转,进而调整照明灯14的角度,进而调整照明灯14的照射角度,进而便于观察车辆后部的环境,并通过第一反射镜9和第二反射镜18配合,进而方便观察周围的环境,通过第二电动推杆11带动第二反射镜18调整角度,进而方便观察指定的角度,并通过伺服电机17带动第二反射镜18旋转角度,进而调整第二反射镜18的观察空间,达到方便及时观察后方的车辆情况,减少光亮照射不到的区域,便于驾驶者停车的效果。
27.综上所述,该智慧灯杆停车管理系统的工作原理和工作过程为,在使用时,首先使
用者通过手机连接无线传输模块,之后通过无线传输模块传递信号给控制面板20,控制面板20控制第一电动推杆4、第二电动推杆11、第三电动推杆15和伺服电机17,第一电动推杆4带动长板5移动,进而调整长板5的高度,之后通过第二电动推杆11带动第二连板12、纵板13和照明灯14旋转,进而调整照明灯14的角度,进而调整照明灯14的照射角度,进而便于观察车辆后部的环境,并通过第一反射镜9和第二反射镜18配合,进而方便观察周围的环境,通过第二电动推杆11带动第二反射镜18调整角度,进而方便观察指定的角度,并通过伺服电机17带动第二反射镜18旋转角度。
28.其中,伺服电机17选用型号为sm30
‑
040,第一电动推杆4选用型号为dt1000,第二电动推杆11选用型号为dt300,第三电动推杆15选用型号为dt200,第一传感器23选用型号为e3jk
‑
5m1的光电传感器,第二传感器24选用型号为tlq5m的光纤传感器,第三传感器25选用型号为e3s
‑
cs3c1d,语音提示器26选用型号为kt
‑
m7,远程传输模块27选用型号为全网通8031l,控制面板20选用型号为jz
‑
20,此伺服电机17、第一电动推杆4、第二电动推杆11、第三电动推杆15、第一传感器23、第二传感器24、第三传感器25、语音提示器26、远程传输模块27和控制面板20均为市面上直接购买的本领域技术人员的公知设备,在这里我们只是对其进行使用,并未对其进行结构和功能上的改进,在此我们不再详细赘述,且电机设置有与其配套的控制开关,控制开关的安装位置根据实际使用需求进行选择,便于操作人员进行操作控制。
29.所述导轨7和滑块8为市场上可购买到的常规部件,滑轨可根据滑块8选型,滑块8可选择型号为hgh50的滑块,其为该领域技术人员所熟知的产品。
30.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1