一种智慧路灯系统的制作方法
1.本发明涉及智能路灯领域,更具体的说是一种智慧路灯系统。
背景技术:
2.智慧路灯是指通过应用先进、高效、可靠的电力线载波通信技术和无线通信技术,实现对路灯的远程集中控制与管理的路灯,智慧路灯具有根据车流量自动调节亮度、远程照明控制、故障主动报警、灯具线缆防盗、远程抄表等功能,能够大幅节省电力资源,提升公共照明管理水平,节省维护成本。但是传统的智慧路灯系统不具有清理模块。
技术实现要素:
3.为克服现有技术的不足,本发明提供一种智慧路灯系统,其有益效果为本发明设置有清理模块,可以对路灯下的沟渠进行清理。
4.一种智慧路灯系统,包括灯杆、照明模块和清理模块,所述灯杆设置在清理模块上,照明模块设置在灯杆的上部。
5.一种智慧路灯系统还包括wifi网络模块,wifi网络模块设置在灯杆上。
6.一种智慧路灯系统还包括监控模块,监控模块设置在灯杆上。
7.一种智慧路灯系统还包括信息发布模块,信息发布模块设置在灯杆上。
8.所述清理模块包括门架、滑座和丝杆,滑座滑动连接在门架上,丝杆的两端分别转动连接在门架的两端,丝杆与滑座通过螺纹配合,丝杆通过伺服电机驱动,灯杆的下端固定连接在滑座上。
附图说明
9.下面结合附图和具体实施方法对本发明做进一步详细的说明。
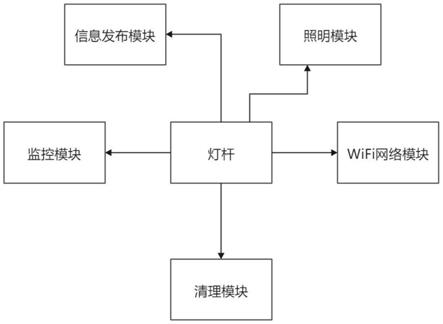
10.图1为智慧路灯系统的组成示意图;
11.图2为清理模块的结构示意图一;
12.图3为清理模块的结构示意图二;
13.图4为灯杆的结构示意图一;
14.图5为灯杆的结构示意图二;
15.图6为门架的结构示意图;
16.图7为沟盒和滤板的结构示意图;
17.图8为沟盒的结构示意图;
18.图9为推架的结构示意图;
19.图10为插条的结构示意图。
20.图中:灯杆101;wifi网络模块102;监控模块103;信息发布模块104;照明模块105;
21.清理模块:
22.门架201;滑座202;丝杆203;拨叉204;
23.沟盒301;横轨道302;
24.滤板401;固定座402;伸缩杆i403;顶条404;竖槽405;弧形弹杆406;侧轴407;滑块408;铲板409;侧柱410;
25.推架501;推杆502;推板503;
26.插条601;升降座602;伸缩杆ii603;竖轴604;传感器探头605。
具体实施方式
27.请参阅图1
‑
10,是本发明提供的一种实施例,该实施例解决的主要技术问题是对路灯下的沟渠进行清理,进一步地,
28.由于智慧路灯系统包括灯杆101、照明模块105和清理模块,清理模块上设置有灯杆101,灯杆101的上部设置有照明模块105,灯杆101起到了一个支撑的作用,照明模块105用来照明,清理模块用来清理路灯下面的沟渠。
29.请参阅图1
‑
10,是本发明提供的一种实施例,该实施例解决的主要技术问题是向路人提供临时的wifi网络服务,进一步地,
30.由于智慧路灯系统还包括wifi网络模块102,灯杆101上设置有wifi网络模块102,wifi网络模块102用来向路人提供临时的wifi网络服务。
31.请参阅图1
‑
10,是本发明提供的一种实施例,该实施例解决的主要技术问题是对路灯周围进行监控,进一步地,
32.由于智慧路灯系统还包括监控模块103,灯杆101上设置有监控模块103,监控模块103用来对路灯周围进行监控。
33.请参阅图1
‑
10,是本发明提供的一种实施例,该实施例解决的主要技术问题是发布各种信息,进一步地,
34.由于智慧路灯系统还包括信息发布模块104,灯杆101上设置有信息发布模块104,信息发布模块104为一个显示屏,用来发布各种信息。
35.请参阅图1
‑
10,是本发明提供的一种实施例,该实施例解决的主要技术问题是调整灯杆101的左右位置,进一步地,
36.由于清理模块包括门架201、滑座202和丝杆203,门架201上滑动连接有滑座202,丝杆203的两端分别转动连接在门架201的两端,丝杆203通过伺服电机驱动,丝杆203与滑座202通过螺纹配合,灯杆101的下端设置在滑座202上。伺服电机驱动丝杆203转动时可以驱动滑座202在门架201上左右移动,进而带动滑座202上的灯杆101左右移动,调整灯杆101的左右位置。
37.请参阅图1
‑
10,是本发明提供的一种实施例,该实施例解决的主要技术问题是将路灯设置在环境中沟渠的上侧,进一步地,
38.由于清理模块还包括沟盒301,沟盒301的后侧固定连接了门架201,将沟盒301安装在路灯下侧的沟渠内,进而将路灯设置在环境中沟渠的上侧。
39.请参阅图1
‑
10,是本发明提供的一种实施例,该实施例解决的主要技术问题是滤板401将沟渠中的水中的杂物进行过滤,进一步地,
40.由于清理模块还包括滤板401,沟盒301内设置有滤板401,滤板401可以将沟渠中的水中的杂物进行过滤。
41.请参阅图1
‑
10,是本发明提供的一种实施例,该实施例解决的主要技术问题是将沟盒301内部下侧的杂物铲起,进一步地,
42.由于清理模块还包括铲板409,滤板401的下端设置在铲板409的下侧中部,铲板409放置在沟盒301的内部。进而滤板401左右移动时带动铲板409左右移动,铲板409左右移动时将沟盒301内部下侧的杂物铲起。
43.请参阅图1
‑
10,是本发明提供的一种实施例,该实施例解决的主要技术问题是便于将铲板409上的杂物取下,进一步地,
44.由于清理模块还包括横轨道302、竖槽405、侧轴407、滑块408和侧柱410,沟盒301的前后两侧都设置有横轨道302,两个侧柱410的下端分别滑动连接在两个横轨道302上,每个侧柱410上均设置有竖槽405,两个竖槽405上均滑动连接有滑块408,滤板401上部的前后两端均设置有侧轴407,两个侧轴407分别转动连接在两个滑块408上,进而两个滑块408分别在两个竖槽405上竖向滑动时分别可以带动两个侧轴407进行升降,进而使得滤板401和铲板409可以升降移动,并且滤板401和铲板409可以通过两个侧轴407在两个滑块408上转动,进而当铲板409将杂物铲起后,可以转动滤板401和铲板409将铲板409上的杂物转动向上带起,进而便于将铲板409上的杂物取下。
45.请参阅图1
‑
10,是本发明提供的一种实施例,该实施例解决的主要技术问题是使得滤板401和铲板409转动后仍然处于稳定的状态,进一步地,
46.由于清理模块还包括顶条404和弧形弹杆406,顶条404固定连接在两个侧柱410的上端之间,两个弧形弹杆406分别固定连接在顶条404的前后两端,两个弧形弹杆406的下端分别固定连接在两个滑块408上,侧轴407通过伺服电机驱动转动时带动滤板401和铲板409顺时针或者逆时针转动,并且两个弧形弹杆406分别给两个滑块408向下的力,使得滤板401和铲板409始终有向下移动的趋势,使得滤板401和铲板409转动后,铲板409可以抵在沟盒301上,便于铲板409可以抵在沟盒301上,使得滤板401和铲板409转动后仍然处于稳定的状态。
47.所述清理模块还包括固定座402、伸缩杆i403、推架501、推杆502和推板503,顶条404的上侧后部固定连接有固定座402,推架501在前后方向上滑动连接在固定座402上,推架501下部的左右两端均固定连接有推杆502,两个推杆502的前部均固定连接有推板503,伸缩杆i403固定连接在固定座402上,伸缩杆i403的活动端固定连接在推架501的后部,滑座202的下侧固定连接有拨叉204,拨叉204插在推架501上。
48.请参阅图1
‑
10,是本发明提供的一种实施例,该实施例解决的主要技术问题是两个推板503前后滑动将铲板409上的杂物推下,进一步地,
49.伸缩杆i403伸缩时可以带动推架501在固定座402上前后滑动,进而带动两个推杆502和两个推板503前后滑动,进而当滤板401和铲板409转动将铲起的杂物带起后,两个推板503前后滑动可以将铲板409上的杂物推下,完成对铲板409的清理。
50.所述清理模块还包括插条601、升降座602、伸缩杆ii603、竖轴604和传感器探头605,插条601插在顶条404的中部,竖轴604竖向滑动连接在插条601上,传感器探头605设置在竖轴604的下端,竖轴604的上端转动连接在升降座602上,竖轴604通过伺服电机驱动转动,升降座602上固定连接有伸缩杆ii603,伸缩杆ii603的活动端固定连接在插条601上。
51.请参阅图1
‑
10,是本发明提供的一种实施例,该实施例解决的主要技术问题是对
沟渠的不同位置进行温度等参数的检测,进一步地,
52.伸缩杆ii603伸缩时可以带动升降座602上下移动,升降座602上下移动可以带动竖轴604和传感器探头605上下移动,伺服电机转动时可以带动竖轴604和传感器探头605以竖轴604的轴线为轴转动,进而带动传感器探头605移动至不同位置,进而对沟渠的不同位置进行温度等参数的检测。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1