用于步进马达机构的绝对位置感测系统的制作方法
1.本公开总体涉及自动照明器,更具体地,涉及用于感测步进马达的绝对位置的方法,所述步进马达控制自动照明器的功能。
背景技术:
2.具有自动化和远程控制功能的照明器(称为自动照明器)在娱乐和建筑照明市场中广为人知。此类产品通常用于剧院、电视演播室、音乐会、主题公园、夜总会和其他场所。典型的自动照明器提供从远程位置控制照明器的摇摄和倾斜功能,允许操作员控制照明器所指的方向,从而控制舞台上或演播室中光束的位置。通常,这种位置控制是通过控制照明器在两个通常称为摇摄和倾斜的正交旋转轴线上的位置来实现的。许多自动照明器附加地或替代性地提供从远程位置对其他参数的控制,例如从照明器发射的光束的强度、焦点、变焦、光束尺寸、光束形状和/或光束图案。
技术实现要素:
3.在第一实施例中,一种照明器包括照明器机构、步进马达、绝对多转旋转位置感测系统,以及控制系统。所述步进马达具有机械联接至所述照明器机构的马达轴。所述步进马达被配置为将所述照明器机构从第一位置移动至第二位置。所述绝对多转旋转位置感测系统感测所述马达轴的绝对多转位置,并且包括第一绝对旋转传感器和第二绝对旋转传感器。第一绝对旋转传感器检测直接联接至所述马达轴的凸轮分度器的绝对旋转位置。第二绝对旋转传感器检测机械联接至所述凸轮分度器的分度轮的绝对旋转位置。所述分度轮和凸轮分度器被配置为,响应于所述凸轮分度器的一个完整的旋转而使所述分度轮旋转预定的量。所述控制系统电联接至数据链路、所述步进马达、所述第一绝对旋转传感器以及所述第二绝对旋转传感器。所述控制系统从所述第一绝对旋转传感器接收第一信号,所述第一信号包括与所述凸轮分度器的绝对旋转位置相关的第一信息。所述控制系统还从所述第二绝对旋转传感器接收第二信号,所述第二信号包括与所述分度轮的绝对旋转位置相关的第二信息。所述控制系统基于所述第一信息和所述第二信息确定所述照明器机构的绝对位置。所述控制系统经由所述数据链路接收照明器机构命令,其中所述照明器机构命令指定了针对照明器机构的所命令的位置,并且所述控制系统引起所述步进马达旋转,以基于所述照明器机构的绝对位置而使所述照明器机构移动至所命令的位置。
4.在第二实施例中,一种控制照明器的照明器机构的位置的方法包括检测直接联接到步进马达的马达轴的凸轮分度器的绝对旋转位置,其中马达轴机械地联接到照明器机构,并使所述照明器机构从第一位置移动到第二位置。该方法还包括检测机械联接到所述凸轮分度器的分度轮的绝对旋转位置,其中分度轮和凸轮分度器被配置为响应于凸轮分度器的一个完整的旋转而使分度轮旋转预定的量。该方法还包括基于凸轮分度器的绝对旋转位置和分度轮的绝对旋转位置来确定照明器机构的绝对位置。该方法还包括经由数据链路接收照明器机构命令(其中所述照明器机构命令指定了针对照明器机构的所命令的位置),
以及引起所述步进马达旋转,以基于所述照明器机构的绝对位置而使所述照明器机构移动至所命令的位置。
5.在第三实施例中,绝对多转旋转位置感测系统包括第一绝对旋转传感器和第二绝对旋转传感器。所述绝对多转旋转位置感测系统感测步进马达的马达轴的绝对位置和马达轴的完整旋转转数。第一绝对旋转传感器检测直接联接到马达轴的凸轮分度器的绝对旋转位置。第二绝对旋转传感器检测机械联接到马达轴的分度轮的绝对旋转位置,其中所述分度轮被配置为响应于所述凸轮分度器的一个完整的旋转而旋转预定的量。
附图说明
6.为了更完整地理解本公开,现在结合附图参考以下简要描述,其中相同的附图标记表示相同的特征。
7.图1展示了根据本公开的照明器系统的示意图;
8.图2展示了根据本公开的控制系统的框图;
9.图3展示了根据本公开的过程的流程图,用于通过确定与自动照明器的负载相关的步进马达的绝对位置来建立负载的绝对位置;
10.图4展示了根据本公开的第一绝对位置感测系统的分解图;
11.图5展示了图4的第一绝对位置感测系统的第二分解图;
12.图6展示了根据本公开的包括第二绝对位置感测系统的摇摄移动系统的分解图;
13.图7展示了根据本公开的自动照明器的包括绝对位置感测系统的摇摄移动系统和倾斜移动系统的等距视图;
14.图8展示了根据本公开的用于马达轴旋转计数的旋转分度系统的示意图;
15.图9展示了根据本公开的自动照明器的聚焦和变焦移动系统的图。
具体实施方式
16.附图中示出了优选实施例,相同的数字用于指代各个附图相同和相对应的部分。
17.一种照明器包括:照明器机构、步进马达、绝对多转(multi-turn)旋转位置感测系统,以及控制系统。步进马达将照明器机构从第一位置移动到第二位置。绝对多转旋转位置感测系统包括绝对旋转传感器,其检测(i)马达轴上的凸轮分度器的绝对位置,以及(ii)联接到凸轮分度器的分度轮的绝对位置。分度轮响应于凸轮分度器的一个完整旋转而旋转预定的量。控制系统基于来自绝对旋转传感器的与凸轮分度器和分度轮的位置相关的信息来确定照明器机构的绝对位置。控制系统接收针对照明器机构的所命令的位置,并基于照明器机构的绝对位置而使步进马达将照明器机构移动到所述所命令的位置。
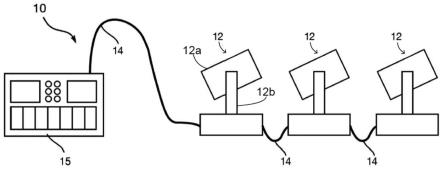
18.图1展示了根据本公开的照明器系统10的示意图。照明器系统10包括根据本公开的多个照明器12。每个照明器12都包含:机载光源、一个或多个颜色改变系统、光调制装置,以及控制照明器12的头部的方向的摇摄和/或倾斜系统。用于控制照明器12的参数的机械驱动系统包括联接到控制系统的马达或其他合适的致动器(正如参考图2更详细地描述),所述控制系统被配置为控制所述马达或其他致动器。
19.照明器12包括安装在轭架12b中的照明器头部12a。轭架12b围绕摇摄旋转轴线(在图1的页面平面中的竖直方向)旋转。照明器头部12a在轭架12b内围绕倾斜旋转轴线(垂直
于图1中的页面)旋转。
20.除了直接地或者经由配电系统连接到主电源之外,每个照明器12的控制系统还通过数据链路14串联或者并联连接到一个或多个控制台15。在由操作员致动时,控制台15经由数据链路14发送控制信号(例如命令),其中控制信号由一个或多个照明器12的控制系统接收。接收控制信号的所述一个或多个照明器12的控制系统可以通过改变进行接收的照明器12的一个或多个参数来作出响应。所述控制信号由控制台15使用dmx-512、art-net、acn(控制网络架构)、流式acn或其他合适的通信协议发送到照明器12。
21.照明器头部12a包括光学系统,该光学系统包括一个或多个照明器机构,每个照明器机构包括一个或多个光学装置,例如图案轮、效果轮和颜色混合(或其他颜色改变)系统,以及棱镜、虹膜、快门和透镜移动系统。术语照明器机构还包括摇摄机构和倾斜机构,摇摄机构配置成使轭架12b相对于照明器12的固定部分旋转,倾斜机构配置成使照明器头部12a相对于照明器轭架12b旋转。照明器机构中的一些或所有包括步进马达或其他旋转致动器,以引起其相关联的光学装置的移动。
22.照明器12的步进马达和/或旋转致动器电联接到照明器12的控制系统并受其控制。这种照明器机构及其在照明器12的控制系统控制下的马达和/或致动器可称为负载移动系统(load movement system)。照明器12的控制系统经由数据链路14从控制台15或其他源接收信号。至少一些信号包括照明器机构命令,该命令包括识别照明器机构并指定了针对照明器机构的所命令的位置的信息。响应于接收到这样的命令信号,照明器12的控制系统使用根据本公开的绝对位置感测系统将识别到的照明器机构移动到所命令的位置。在一些实施例中,数据链路14具有多个逻辑通道,并且照明器机构由在其上接收了照明器机构命令的逻辑通道的标识符来识别。
23.照明器12可以包括步进马达,以控制轭架、头部和/或内部光学系统的移动。步进马达在每个360
°
整圈中具有固定数量的整步(full step),在某些情况下,步进马达具有200步,每步1.8
°
,但其他马达可能具有其他数量的整步。步进马达可以通过运动控制系统在任一方向上移过这些整步中的一个或多个。
24.可以通过附接到步进马达的时钟的时针(负载)的示例来理解马达及其负载的绝对和增量位置控制。增量运动控制系统(imcs)能够将时钟指针移动30度(或钟面上的一小时),但imcs不知道它是否已将时钟时针从例如1:00移动到2:00或从7:00移动到8:00。对于较大或较重的时钟指针,马达轴可通2:1的带驱动系统联接至时钟指针,其中马达轴需要两个完整的旋转来将时钟指针旋转360度(或一个完整的旋转)。对于这样的系统,当imcs使马达转动经过一个完整的旋转时,它知道它已将时钟指针移动了180度,但它不知道它是否已将时钟指针从例如2:00移动到8:00或从9:00移动到3:00。
25.如果将光传感器放置在钟面的12:00位置,以在时钟指针挡住照向传感器的光时向imcs发出信号,则imcs将被称为分度imcs。分度imcs可以通过旋转时钟指针直到从传感器接收到信号来校准自身,并且从那个“分度位置”开始,分度imcs可以通过使马达从该分度位置沿顺时针方向旋转180度(将时钟指针旋转90度)而可靠地将时钟指针移动到3:00,然后通过在逆时针方向上将马达旋转120度(将时钟指针旋转90度)而从3:00位置返回到1:00。
26.与能够围绕钟面连续旋转的时钟指针不同,由分度imcs控制的某些负载可能具有
对负载的运动范围的限制(例如,仅旋转经过270度的旋转负载)。这种负载的分度位置可以通过将负载沿第一方向移动到限位开关、传感器(如上)、物理末端止动件或其他技术以达到负载的已知物理位置来建立。在一些此类分度imcs中,通过将负载沿相反方向移动到第二限位开关、传感器(如上)或物理末端止动件中来建立相反的运动范围(相反的已知位置)。
27.imcs(或分度imcs)中可使用步进马达或伺服马达。步进马达本质上是一种分度装置,因为它在imcs的控制下以具有已知大小(已知的旋转角度)的步长在已知方向上移动。伺服马达是一种自由运行的马达,其方向和转速由其mcs控制,这需要马达或负载上的位置反馈来可预测地控制负载的位置。在所述反馈由仅感测角旋转增量的位置编码器提供的情况下,伺服mcs可以被认为是增量mcs。
28.相比之下,绝对mcs(amcs)具有在启动时可用的与马达和/或负载的当前物理位置相关的信息。这种编码器可以包括附接在负载上的图案化物体(例如,用于旋转编码器的盘,或用于线性编码器的带尺),还包括传感器,该传感器能够读取当前在传感器下方的图案并从中明确地确定负载的当前实际物理位置。这样的图案化物体通常具有细粒度的细节,以允许传感器以高精度读取当前位置。在amcs中可以使用步进马达或伺服马达。
29.在一些步进马达运动控制系统中,步进马达可以通过使用称为微步进的技术而定位在其整步之间。运动控制系统可以使步进马达移动到两个相邻整步之间的静态位置(微步),方法是将施加到马达的功率快速地在以下两个信号之间交替:使马达移动到相邻整步中的第一个整步的信号,以及使马达移动到相邻整步中的第二个整步的信号,从而可以非常精确地将马达和照明器机构进行定位。交替步之间的占空比控制着马达在两个整步之间的当前微步位置。与步进电机的增量整步不同,相邻整步之间的微步位置是在运动控制系统的绝对控制之下,并且由交替步之间的占空比决定,因此运动控制系统可靠地知道马达处在相邻的整步之间的哪个微步上。
30.当在自动照明器12中使用时,上述分度imcs的分度过程可能对用户来说具有缺点:(i)该过程可能花费大量时间来执行,在一些情况下为几十秒;(ii)照明器机构在执行该过程时可能会产生噪音;(iii)在摇摄和倾斜的情况下,当头部旋转到其已知的固定位置时,该过程可能会引起头部的大量移动。类似地,amcs可能具有以下缺点:(i)如果图案化物体例如因为照明器12的运输或粗暴搬运而损坏,则必须更换图案化物体,或者(ii)如果污垢、油或在恶劣环境中使用自动照明器时可能出现的其他物质的堆积使图案变得模糊,则可能不得不将照明器12部分地拆卸以进行清洁。
31.根据本公开的绝对位置感测系统提供了一种方法,用于确定自动照明器中的步进马达及其相关负载在启动时的绝对位置,且没有这些缺点。特别地,根据本公开的绝对位置感测系统几乎不需要或根本不需要移动或时间来确定步进马达及其相关负载的位置。
32.图2展示了根据本公开的控制系统(或控制器)200的框图。控制系统200适用于控制根据本公开的自动照明器的步进马达移动系统。控制系统200还适用于控制光源、颜色改变装置、光调制装置、摇摄和/或倾斜系统、负载移动系统,以及照明器12的其他控制功能。
33.控制系统200包括电联接到存储器204的处理器202。处理器202由硬件和软件实现。处理器202可以实现为一个或多个中央处理单元(cpu)芯片、核(例如作为多核处理器)、现场可编程门阵列(fpga)、专用集成电路(asic)和数字信号处理器(dsp)。
34.处理器202进一步电联接到通信接口206并且与通信接口206通信。通信接口206联接到数据链路14并且被配置为经由数据链路14通信。处理器202还经由控制接口208联接到一个或多个传感器、马达、致动器、控制器和/或其他装置。处理器202被配置为经由通信接口206从数据链路14接收控制信号,并且作为响应,经由控制接口208控制照明器12的系统和机构。
35.处理器202进一步电联接到马达210、可选的马达制动器212、马达旋转计数器位置传感器214以及马达轴位置传感器216并与它们通信。处理器202被配置为经由通信接口206从数据链路14接收控制信号,并作为响应,基于来自马达旋转计数器位置传感器214和马达轴位置传感器216的信号来控制马达210和可选的马达制动器212,以控制照明器12的系统和机构(或负载)的物理位置。在一些实施例中,从其中一个马达旋转计数器位置传感器214读取的值是分度轮(如下所述)的绝对旋转位置(以度或弧度为单位),并且可以基于分度轮上的齿数转换成马达的完整旋转转数。在一些实施例中,从其中一个马达轴位置传感器216读取的值是马达轴的绝对旋转位置(以度或弧度为单位),并且可以基于马达轴的一个完整旋转中的步数转换成马达的步进位置。
36.控制系统200适用于实现过程、模块控制、光学装置控制、摇摄和倾斜移动、参数控制、马达控制、位置传感器控制、制动控制和本文公开的其他功能,其可以实现为存储在存储器204中并由处理器202执行的指令。存储器204包括一个或多个磁盘和/或固态驱动器,并且可以用于存储在程序执行期间读取和写入的指令和数据。存储器204可以是易失性和/或非易失性的并且可以是只读存储器(rom)、随机存取存储器(ram)、三元内容可寻址存储器(tcam)和/或静态随机存取存储器(sram)。
37.图3展示了根据本公开的过程300的流程图,用于通过确定与自动照明器的负载相关联的步进马达的绝对位置来建立所述负载的绝对位置。对例如照明器12的摇摄移动进行控制的步进马达可以具有与负载的齿轮驱动连接或滑轮驱动连接,因此马达轴可以在负载移动经过其完整的运动范围时旋转多次。在一些实施例中,步进马达的控制器具有在完整步之间微步进(micro-stepping)多个较小的步的能力。这些微步(microstep)不需要额外的传感,因为它们是由来自控制器的信号控制的,因此当前的微步位置对于控制器是已知的。
38.根据本公开的绝对位置感测系统考虑这两个(或三个)参数以确定负载的当前绝对位置。参数是:步进马达轴的绝对旋转位置、指示马达轴所在转数的装置的绝对旋转位置,以及(可选)当前微步位置。在过程300的步骤中,在照明器12在步骤302中上电之后,处理器202读取参数值。马达轴位置传感器216和马达旋转计数器位置传感器214是机械地附接到马达系统的物理传感器,并且它们的当前值分别在步骤304和306中被读取。在可选步骤308中(其中控制系统提供步进马达的微步进控制),从存储器204读取马达微步信息或者从凸轮分度器的高分辨率绝对旋转位置推断马达微步信息。在步骤310中,参数值的组合(在一些实施例中连同存储的值,例如齿轮传动比或滑轮传动比)描述了步进马达的绝对位置,并使处理器202能够确定负载的当前绝对位置。根据本公开的绝对位置感测系统被配置为,在上电时从步进马达轴的绝对旋转位置的初始静态值和马达旋转计数器位置的初始静态值做出该确定,例如,不需要在如上所述的分度过程中的负载针对分度imcs的移动或负载的其他移动。
39.在一个示例中,在使用8:1驱动机构将负载移动经过540度旋转的机构中,步进马达在使负载移动经过其完整的540度旋转时将完成12个完整旋转。假设运动控制系统在成对的完整步之间创建了100个微步。在这样的系统中,一个完整的马达旋转使负载旋转经过540/8=67.5度;马达轴的1度的旋转使负载旋转经过67.5/360=0.1875度;一个微步使负载旋转经过0.1875/100=0.001875度。进一步假设(为简化示例),马达旋转计数器位置值、马达轴位置值和微步值在负载的行程的一端都为零。在这样的假设下,如果处理器202从马达轴位置传感器216读取13度的值,从马达旋转计数器位置传感器214读取值1,并具有存储的微步值33(描述步进马达的绝对位置的三个值),则处理器202确定负载处于与行程端部位置相距一绝对位置(1
×
67.5)+(13
×
0.1875)+(33
×
.001875)=70度。
40.图4展示了根据本公开的第一绝对位置感测系统400的分解图。第一绝对位置感测系统400包括旋转分度系统406和传感器组件410。旋转分度系统406包括凸轮分度器407和分度轮408。在其他实施例中,可使用其他适合的旋转分度系统。第一绝对位置感测系统400感测步进马达的绝对多转旋转位置,并且适合在照明器12的倾斜系统(或其他步进驱动系统)中使用。步进马达402具有从步进马达402的相对两侧突出的马达轴412。在其他实施例中,马达轴412可以仅从步进马达402的单侧伸出。马达轴412的一端联接到驱动带404或其他合适的驱动机构,例如齿轮或线性致动器。在其他实施例中,对于非摇摄或倾斜的应用,马达轴412可以联接到线性致动器或其他驱动机构。
41.马达轴412的同一端还直接联接到凸轮分度器407。凸轮分度器407包括具有单个齿的齿轮。当凸轮分度器407转过马达轴412的一整圈时,凸轮分度器407移动分度轮408转过一个齿。分度轮408是经由凸轮分度轮407机械联接到马达轴412的齿轮,并且配置为响应于马达轴412旋转一整圈而旋转一预定量。因此,分度轮408的旋转位置提供了对马达轴412的整数个完整旋转的指示。
42.使用传感器组件410中的传感器来测量凸轮分度器407和分度轮408这两者的绝对旋转位置。这些传感器可以是磁性的、光学的、机械的、感应的、电阻的或任何其他类型的绝对位置旋转传感器。传感器可以具有更高或更低的分辨率。例如,传感器可以以步或步的分数(fraction)来读取凸轮分度器位置,或以角度或角度的分数来读取分度器位置。
43.在图4所示的实施例中,传感器是磁性的。第一磁体固定至凸轮分度器407的中心,第二磁体固定至分度轮408的中心。这些磁体与传感器组件410的第一磁性传感器和第二磁性传感器(未示出)对齐,第一磁性传感器和第二磁性传感器配置为读取与其相关联的磁体的绝对位置。
44.在一些实施例中,第一磁体和第二磁体中的一个或两个是双极直径磁体,其磁极被定向成正交于凸轮分度器407或分度轮408的旋转轴线。在其他实施例中,第一磁体和第二磁体中的一个或两个可以是条形磁体,条形磁体跨越凸轮分度器407或分度轮408的旋转轴线而安装,条形磁体的磁极被定向成正交于其旋转轴线。在这两个实施例中,传感器组件410的第一磁性传感器和第二磁性传感器可以包括磁性旋转位置传感器,该磁性旋转位置传感器产生表示双极磁体的绝对旋转位置的输出信号。
45.在某些应用中,轭架12b从行程的第一端到行程的第二端在摇摄方向上的总移动为540度。在一些这样的应用中,齿轮传动比和滑轮传动比要求马达轴412转过12整圈,以使轭架12b旋转满540度。因此,当轭架12b从其在行程的一端处的位置移动到其在行程的另一
端处的位置时,凸轮分度器407将旋转12个整圈,并且移动分度轮408以旋转12个齿。在这些应用中,分度轮408被设计成至少有13个齿,使得其在行程一端处的角旋转的绝对位置与其在行程另一端处的角旋转的绝对位置是不同的。一般情况下,当马达轴412和凸轮分度器407旋转n个整圈时,分度轮408被设计成至少有n+1个齿。
46.图5展示了图4中的第一绝对位置感测系统400的第二分解图。在该图中(从图4的视野旋转)可以看到传感器组件410包括电路板518,电路板518包括绝对旋转传感器514和516。绝对旋转传感器516检测凸轮分度器407(并因此检测马达轴412)的绝对旋转位置,并且绝对旋转传感器514检测分度轮408的绝对旋转位置(因此配置为马达轴412的完整旋转数量的旋转计数器位置传感器)。尽管这里示出的绝对旋转传感器514和516安装至电路板518,但是本发明并不限于此,传感器514和516可以安装至照明器的结构件或马达的结构件或其他适合安装结构件。
47.在某些情况下,根据本公开的照明器在被制造后首次通电,其中一个或多个照明机构处于已知的机构位置。在那些一个或多个机构具有根据本公开的绝对位置感测系统的情况下,控制系统200可将用于每个这种机构的绝对旋转传感器514和516上的读数记录为马达轴的旋转数量以及与已知机构位置(分别)相对应的马达轴的绝对旋转位置。
48.如果根据本公开的照明器在被制造后首次通电时,其中一个或多个照明机构处于未知的机构位置后,那么上述分度过程可用来将机构移动至已知位置。然后,控制系统200将用于每个这种机构的绝对旋转传感器514和516上的读数记录成马达轴的旋转圈数以及与已知机构位置(分别)相对应的马达轴的绝对旋转位置。
49.图6展示了根据本公开的包括第二绝对位置感测系统600的摇摄移动系统650的分解图。第二绝对位置感测系统600包括旋转分度系统606和传感器组件610。旋转分度系统606包括凸轮分度器607和分度轮608。第二绝对位置感测系统600感测步进马达的绝对多转旋转位置,并且适合在照明器12的摇摄系统(或其他步进驱动系统)中使用。步进马达602包括马达轴612,马达轴612具有从步进马达602的相对两侧突出的第一端和第二端。马达轴612的第一端联接到驱动带604(或另一个驱动机构,如齿轮)。在其他实施例中,对于非摇摄或倾斜的应用,马达轴612可以联接到线性致动器或其他驱动机构。驱动带604驱动固定联接到头部联轴器624的摇摄齿轮620,头部联轴器624可旋转地联接到底架622。马达轴612的第二相对端联接到凸轮分度器607,从而联接到分度轮608。使用传感器组件610中的传感器来测量凸轮分度器607和分度轮608的绝对旋转位置,该传感器组件610包括电路板618。
50.图7展示了照明器12的摇摄移动系统650和倾斜移动系统750的等距视图,包括根据本公开的绝对位置感测系统。如图6所示,步进马达602通过头部联轴器624驱动照明器12的轭架12b(并且因此驱动照明器头部12a)的摇摄移动,并且利用第二绝对位置感测系统600来确定马达轴612(经由凸轮分度器607)和分度轮608(在图7中都未示出)这两者的绝对旋转位置。类似地,倾斜步进马达702通过驱动带704(或诸如齿轮的其他驱动机构)和联轴器724来驱动照明器12的照明器头部12a的倾斜移动,并且利用包括电路板718的绝对位置感测系统700来确定倾斜步进马达702的轴和绝对位置感测系统700内的相关联的分度轮(未示出)这两者的绝对旋转位置。绝对位置感测系统700联接至倾斜步进马达702的轴的与倾斜驱动齿轮相同的一端,而第二绝对位置感测系统600联接至步进马达602的马达轴612的不同于摇摄驱动齿轮的相对端。在实践中,绝对位置感测系统可连接至马达轴的任一端,
或者,绝对位置感测系统可通过齿轮或驱动带连接至辅助滑轮或轴。
51.图8展示了根据本公开的用于马达轴旋转计数的旋转分度系统806的示意图。旋转分度系统806适合在图4至图7的绝对位置感测系统中使用。旋转分度系统806包括凸轮分度器807和分度轮808。图8示出了,当凸轮分度器807在联接至马达轴的情况下旋转时,凸轮分度器807的三个顺序位置(807a、807b、和807c)和分度轮808的三个顺序位置(808a、808b、和808c)。位置807a中的凸轮分度器807上的单个齿正朝着位置808a中的分度轮808上的当前活动齿(以黑色示出)移动。位置807b中的凸轮分度器807的齿已接触位置808b中的分度轮808上的当前活动齿,并正使分度轮808旋转。位置807c中的凸轮分度器807的齿正脱离与位置808c中的分度轮808上的当前活动齿的接触,因此分度轮808c在转动了一个齿后停止旋转。绝对旋转传感器(例如,516)通过感测固定联接到凸轮分度器807的磁体817的旋转位置(817a、817b和817c)来感测凸轮分度器807的绝对旋转位置。类似地,绝对旋转传感器(例如,514)通过感测固定联接到分度轮808的磁体815的旋转位置(815a、815b和815c)来感测分度轮808的绝对旋转位置。
52.在马达轴的部分旋转期间,本公开的分度轮(在这些实施例中,在凸轮分度器的单个齿的作用下)从一个位置渐进地移动到下个位置,并且在马达轴的一整圈旋转的其余时间段保持静止。分度轮不随马达轴连续旋转,而是仅在马达轴旋转一圈的其中一部分时分度(或渐进地旋转)到一个新的位置。在图8所示的例子中,可以看出分度轮808有16个齿,凸轮分度器807(马达轴)每旋转一整圈,分度轮808移动22.5度。因此,分度轮808只在凸轮分度器807旋转大约22.5度期间移动,即,这时凸轮分度器807的单个齿与分度轮808的当前活动齿接触。分度轮808在马达轴和凸轮分度器807的剩余337.5度旋转期间保持静止。虽然本公开的实施例包括单齿凸轮分度器和多齿分度轮,但在其他实施例中,可以使用每当马达轴旋转一整圈时提供一次渐进旋转的其他合适机构。
53.所公开的绝对旋转位置感测系统的使用不仅限于自动照明器的摇摄和倾斜系统,还可用于任何其机动移动和光学功能。图9展示了照明器12的聚焦移动系统920和变焦移动系统960的视图。聚焦运动系统920包括根据本公开的绝对位置感测系统900、步进马达902和带系统904。步进马达902通过带系统904驱动透镜964移动,以便使照明器12投射的光束聚焦,并且绝对位置感测系统900确定凸轮分度器(未示出)和分度轮(未示出)这两者的绝对旋转位置。类似地,步进马达952通过带系统954驱动透镜托架962移动,以便改变照明器12投射的光束的光束角,并且绝对位置感测系统950确定凸轮分度器956和分度轮(未示出)这两者的绝对旋转位置。
54.在控制系统200控制下的图6和图7的摇摄移动系统650、图7的倾斜移动系统750、图9的聚焦移动系统920和变焦移动系统960公开了根据本公开的负载移动系统的实施例。在根据本公开的负载移动系统中,用于感测负载移动系统的马达轴的绝对位置的绝对多转旋转位置感测系统提供信息,从而允许控制系统200确定负载的绝对位置。
55.虽然本文仅描述了本公开的一些实施例,但受益于本公开的本领域技术人员将理解可以设计其他实施例而不背离本文公开的范围。虽然已经详细描述了本公开,但应理解的是,在不背离本公开的精神和范围的情况下,可以对本公开进行各种更改、替换和改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1