智能化的避免园林藤蔓附着攀爬的路灯的制作方法
1.本发明属于园林路灯技术领域,更具体地说,特别涉及智能化的避免园林藤蔓附着攀爬的路灯。
背景技术:
2.路灯起到了照明的效果,在园林中会设置有路灯进行照明,同时路灯会增加园林的美观,园林中的路灯大多都缠绕有藤蔓,为了避免藤蔓对路灯造成损坏,需要在路灯的外侧设置防止蔓藤攀爬与附着的机构。
3.基于上述,现有的路灯缺少对藤蔓的防攀爬结构,藤蔓在缠绕后具有以下影响,藤蔓不仅影响路灯的照明,藤蔓还会影响维修人员的攀爬,藤蔓影响了路灯的美观,藤蔓的水分会腐蚀支撑支撑杆的外壁,严重时会造成支撑杆腐烂的现象,路灯在照明过程中会产生较大的热量,热量会影响路灯的使用寿命,支撑杆的外壁会粘附有灰尘,灰尘影响支撑杆的美观。
技术实现要素:
4.为了解决上述技术问题,本发明提供智能化的避免园林藤蔓附着攀爬的路灯,以解决现有的路灯会缠绕有藤蔓,路灯在照明过程中会产生较大的热量的问题。
5.本发明用于智能化的避免园林藤蔓附着攀爬的路灯的目的与功效,由以下具体技术手段所达成:
6.智能化的避免园林藤蔓附着攀爬的路灯,包括支撑柱;
7.所述支撑柱的底部开设有四个螺栓安装孔,安装孔内安装有固定螺栓;
8.灯罩,所述灯罩开设有散热孔,灯罩安装在支撑柱的上方;第一定位套筒,所述第一定位套筒卡接在支撑柱的外侧;
9.驱动机构,所述驱动机构安装在灯罩和第一定位套筒之间;
10.第二定位套筒,所述第二定位套筒卡接在支撑柱的外侧,第二定位套筒的底部有压紧块,压紧块在支撑柱的固定螺栓上方;
11.旋转支撑结构,所述旋转支撑结构卡接在第二定位套筒的外侧防攀爬组件,所述防攀爬组件安装在旋转支撑结构的外侧;连接杆,所述连接杆卡接在第一定位套筒和第二定位套筒之间。
12.进一步的,所述灯罩包括有:
13.锁定扣,灯罩的底部有一个螺纹连接套筒,锁定扣呈环形阵列状分布在螺纹连接套筒的底部,锁定扣的底部有锁定斜块,第一定位套筒的上方开设有三个呈环形阵列状分布的定位槽,锁定斜块卡接在定位槽内;
14.支撑板,支撑板在灯罩的外侧,支撑板开设有一个安装孔,电动马达卡接在支撑板的安装孔内,支撑板安装有一个锁紧螺栓。
15.进一步的,所述驱动机构包括有:
16.电动马达,电动马达的驱动轴底部安装有一个驱动齿轮;
17.第一驱动盘,第一驱动盘的外侧有拨动齿;
18.第二驱动盘,第二驱动盘的外侧也有拨动齿,拨动齿与驱动齿轮相啮合,第一驱动盘和第二驱动盘的上方有扇片。
19.进一步的,所述第一定位套筒开设有一个环形槽,第一驱动盘和第二驱动盘卡接在环形槽内,第一驱动盘的底部有两个相对称的安装套筒,第二驱动盘的底部有两个安装块,安装块卡接在第一驱动盘的安装套筒内。
20.进一步的,所述第二驱动盘的安装块开设有一个环形槽,环形槽内卡接有卡箍,安装块的环形槽底部有一个倾斜面。
21.进一步的,所述旋转支撑结构包括有:
22.第一支撑盘,第二定位套筒开设有一个环形槽,第一支撑盘卡接在第二定位套筒的环形槽内,第一支撑盘的底部有两个安装套筒;
23.第二支撑盘,第二支撑盘接在第二定位套筒的环形槽内,第二支撑盘的底部有两个安装块,安装块卡接在第一支撑盘的安装套筒内;
24.滑动轨道,第一支撑盘和第二支撑盘的底部均有滑动轨道。
25.进一步的,所述防攀爬组件包括有:
26.距离感应器,第一支撑盘和第二支撑盘的上方有安装壳体,距离感应器卡接在安装壳体内;
27.电磁铁,第一支撑盘和第二支撑盘的底部有安装块,电磁铁卡接在安装块内,电磁铁与距离感应器电性连接;
28.限位杆,限位杆开设有外螺纹,限位杆安装有一个定位螺帽,限位杆的外侧套接有一个支撑弹簧;
29.滑动座,滑动座开设有两个滑动槽,滑动座卡接在滑动轨道内侧,滑动座在限位杆的外侧;
30.切割刀片,滑动座的内侧有两个定位斜块,切割刀片开设有一个安装孔,定位斜块卡接在切割刀片的安装孔内。
31.进一步的,所述连接杆开设有两个腰圆孔,第一驱动盘和第二驱动盘的底部有锁定座,第一支撑盘和第二支撑盘的上方也有锁定座,锁定座卡接在连接杆的腰圆孔内,连接杆的外侧卡接有清洁海绵,清洁海绵与支撑柱的外壁相接触。
32.与现有技术相比,本发明具有如下有益效果:
33.首先,通过防攀爬组件防止藤蔓攀爬,将防攀爬组件设置为转动连接,使得切割刀片呈转动状态对藤蔓进行切割,通过距离感应器对动物和游客感应,当距离感应器感应到动物的游客时,切割刀片自动收缩,避免了切割刀片对游客和动物刮伤;
34.具体的,距离感应器感应到有动物和游客经过时,距离感应器将信号传给电磁铁,电磁铁通电,此时滑动座带动切割刀片滑动,从而使切割刀片隐藏在第一支撑盘和第二支撑盘的底部,当距离感应器感应不到游客和动物时,电磁铁断电,切割刀片在弹簧的支撑下向外弹出,从而使切割刀片继续对藤蔓进行切割。
35.其次,通过驱动机构和连接杆相配合带动防攀爬组件转动,通过连接杆将驱动机构和防攀爬组件相连接,通过锁定扣将驱动机构锁定在支撑柱的外侧,第一驱动盘和第二
驱动盘的上方设置有扇片,在驱动机构驱动防攀爬组件转动过程中,扇片对灯罩进行散热,连接杆设置有清洁海绵,连接杆转动时清洁海绵将粘附在支撑柱外侧的灰尘擦除,从而解决了支撑柱外侧粘附灰尘影响美观。
附图说明
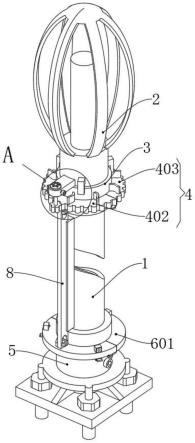
36.图1是本发明主体的轴侧结构示意图。
37.图2是本发明的仰视角轴侧结构示意图。
38.图3是本发明的拆分轴侧结构示意图。
39.图4是本发明的第二支撑盘仰视角轴侧结构示意图。
40.图5是本发明图4的俯视角轴侧结构示意图。
41.图6是本发明的防攀爬组件拆分轴侧结构示意图。
42.图7是本发明图1的a处放大结构示意图。
43.图8是本发明图2的b处放大结构示意图。
44.图9是本发明图3的c处放大结构示意图。
45.图10是本发明图4的d处放大结构示意图。
46.图中,部件名称与附图编号的对应关系为:
47.1、支撑柱;2、灯罩;201、锁定扣;202、支撑板;3、第一定位套筒;4、驱动机构;401、电动马达;402、第一驱动盘;403、第二驱动盘;5、第二定位套筒;6、旋转支撑结构;601、第一支撑盘;602、第二支撑盘;603、滑动轨道;7、防攀爬组件;701、距离感应器;702、电磁铁;703、限位杆;704、滑动座;705、切割刀片;8、连接杆。
具体实施方式
48.下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
49.在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
50.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
51.实施例一:
52.如附图1至附图10所示:
53.本发明提供智能化的避免园林藤蔓附着攀爬的路灯,包括支撑柱1;
54.支撑柱1的底部开设有四个螺栓安装孔,安装孔内安装有固定螺栓;
55.灯罩2,灯罩2开设有散热孔,灯罩2安装在支撑柱1的上方,灯罩2包括有锁定扣201
和支撑板202,灯罩2的底部有一个螺纹连接套筒,螺纹连接套筒方便灯罩2的安装与拆卸,锁定扣201呈环形阵列状分布在螺纹连接套筒的底部,锁定扣201的底部有锁定斜块,第一定位套筒3的上方开设有三个呈环形阵列状分布的定位槽,锁定斜块卡接在定位槽内,此时锁定扣201将第一定位套筒3锁定在支撑柱1的外侧,锁定扣201的设置方便第一定位套筒3的安装与拆卸;支撑板202在灯罩2的外侧,支撑板202开设有一个安装孔,电动马达401卡接在支撑板202的安装孔内,支撑板202对电动马达401进行支撑,支撑板202安装有一个锁紧螺栓,锁紧螺栓对电动马达401锁紧;第一定位套筒3,第一定位套筒3卡接在支撑柱1的外侧;
56.驱动机构4,驱动机构4安装在灯罩2和第一定位套筒3之间,驱动机构4包括有驱动机构4、电动马达401、第一驱动盘402和第二驱动盘403,电动马达401的驱动轴底部安装有一个驱动齿轮,电动马达401带动驱动齿轮转动;第一驱动盘402的外侧有拨动齿;第二驱动盘403的外侧也有拨动齿,拨动齿与驱动齿轮相啮合,驱动齿轮在转动时带动第一驱动盘402和第二驱动盘403转动,第一驱动盘402和第二驱动盘403的上方有扇片,在第一驱动盘402和第二驱动盘403转动时扇片对灯罩2进行散热,第一定位套筒3开设有一个环形槽,第一驱动盘402和第二驱动盘403卡接在环形槽内,第一定位套筒3的环形槽对第一驱动盘402和第二驱动盘403定位,从而方便第一驱动盘402和第二驱动盘403的转动,第一驱动盘402的底部有两个相对称的安装套筒,第二驱动盘403的底部有两个安装块,安装块卡接在第一驱动盘402的安装套筒内,安装块和安装套筒相配合将第一驱动盘402、第二驱动盘403相连接,从而使第一驱动盘402和第二驱动盘403形成一个驱动整体,第一驱动盘402和第二驱动盘403的设置方便安装与拆卸,第二驱动盘403的安装块开设有一个环形槽,环形槽内卡接有卡箍,环形槽对卡箍进行定位,卡箍对第一驱动盘402和第二驱动盘403进行紧固,安装块的环形槽底部有一个倾斜面,倾斜面使得第一驱动盘402和第二驱动盘403牢固的拼接;
57.第二定位套筒5,第二定位套筒5卡接在支撑柱1的外侧,第二定位套筒5的底部有压紧块,压紧块在支撑柱1的固定螺栓上方,压紧块对支撑柱1的固定螺栓进行压紧;
58.旋转支撑结构6,旋转支撑结构6卡接在第二定位套筒5的外侧,旋转支撑结构6包括有第一支撑盘601、第二支撑盘602和滑动轨道603,第二定位套筒5开设有一个环形槽,第一支撑盘601卡接在第二定位套筒5的环形槽内,第二定位套筒5的环形槽对第一支撑盘601定位,第一支撑盘601的底部有两个安装套筒;第二支撑盘602接在第二定位套筒5的环形槽内,第二定位套筒5的环形槽对第二支撑盘602定位,第二支撑盘602的底部有两个安装块,安装块卡接在第一支撑盘601的安装套筒内,安装套筒和安装块相配合使得第一支撑盘601、第二支撑盘602牢固的拼接;第一支撑盘601和第二支撑盘602的底部均有滑动轨道603,滑动轨道603对滑动座704进行定位与支撑;
59.防攀爬组件7,防攀爬组件7安装在旋转支撑结构6的外侧,防攀爬组件7包括有距离感应器701、电磁铁702、限位杆703、滑动座704和切割刀片705,第一支撑盘601和第二支撑盘602的上方有安装壳体,距离感应器701卡接在安装壳体内,安装壳体对距离感应器701进行定位,当有动物和游客经过距离感应器701时,距离感应器701将信号传给电磁铁702,使得电磁铁702通电;第一支撑盘601和第二支撑盘602的底部有安装块,电磁铁702卡接在安装块内,电磁铁702与距离感应器701电性连接,电磁铁702通电时会对限位杆703进行吸动;限位杆703开设有外螺纹,限位杆703安装有一个定位螺帽,定位螺帽对限位杆703的端
部进行定位,定位螺帽方便限位杆703的安装与拆卸,限位杆703和定位螺帽选用铁材料,当电磁铁702会吸动限位杆703滑动,限位杆703的外侧套接有一个支撑弹簧,当电磁铁702断电时,支撑弹簧推动限位杆703进行复位;滑动座704开设有两个滑动槽,滑动槽对滑动座704进行定位,滑动座704卡接在滑动轨道603内侧,滑动座704在限位杆703的外侧,在限位杆703滑动时会带动滑动座704滑动;滑动座704的内侧有两个定位斜块,定位斜块将切割刀片705锁定在滑动座704的内侧,切割刀片705开设有一个安装孔,定位斜块卡接在切割刀片705的安装孔内,当距离感应器701感应到有动物和游客经过时,电磁铁702通电,此时滑动座704带动切割刀片705滑动,从而使切割刀片705隐藏在第一支撑盘601和第二支撑盘602的底部,防止切割刀片705在转动时划伤动物和游客,第一支撑盘601和第二支撑盘602在转动时带动切割刀片705转动,使得切割刀片705对攀爬的蔓藤进行切割,从而防止蔓藤攀爬的现象;
60.连接杆8,连接杆8卡接在第一定位套筒3和第二定位套筒5之间,连接杆8开设有两个腰圆孔,第一驱动盘402和第二驱动盘403的底部有锁定座,第一支撑盘601和第二支撑盘602的上方也有锁定座,锁定座为弹性结构,弹性结构的锁定座方便连接杆8的安装与拆卸,锁定座卡接在连接杆8的腰圆孔内,锁定座将连接杆8进行锁定,此时连接杆8将第一驱动盘402、第二驱动盘403、第一支撑盘601和第二支撑盘602相连接,从而使第一驱动盘402和第二驱动盘403转动时带动第一支撑盘601、第二支撑盘602转动,连接杆8的外侧卡接有清洁海绵,清洁海绵与支撑柱1的外壁相接触,在连接杆8转动时带动清洁海绵转动,使得清洁海绵将粘附在支撑柱1外壁的灰尘擦除。
61.本实施例的具体使用方式与作用:
62.使用时,首先将第二定位套筒5套接在支撑柱1的外侧,而后将第一支撑盘601和第二支撑盘602卡接在第二定位套筒5的环形槽内,将第一支撑盘601和第二支撑盘602通过卡箍锁定,而后将防攀爬组件7安装在第一支撑盘601和第二支撑盘602之间,使距离感应器701和电磁铁702电性连接,将第一定位套筒3卡接在支撑柱1的外侧,将第一驱动盘402和第二驱动盘403卡接在第一定位套筒3的环形槽内,将第一驱动盘402和第二驱动盘403通过卡箍锁定在第一定位套筒3的外侧,将电动马达401安装在第一定位套筒3的通孔内,使电动马达401底部的驱动齿轮和第一支撑盘601、第二支撑盘602的拨动齿相啮合,而后将安装有清洁海绵的连接杆8卡接在第一定位套筒3和第二定位套筒5之间,控制电动马达401带动驱动齿轮转动,驱动齿轮转动时会拨动旋转支撑结构6转动,旋转支撑结构6通过连接杆8带动防攀爬组件7转动,此时切割刀片705呈转动状态对攀爬的蔓藤进行切割,从而防止蔓藤攀爬的效果,当距离感应器701感应到有动物和游客经过时,电磁铁702通电,此时滑动座704带动切割刀片705滑动,从而使切割刀片705隐藏在第一支撑盘601和第二支撑盘602的底部,防止切割刀片705在转动时划伤动物和游客。
63.实施例二,将第一定位套筒3和第二定位套筒5的整体结构设置成两部分,两部分通过螺栓固定连接,从而方便第一定位套筒3和第二定位套筒5在较长的支撑柱1外侧安装与拆卸。
64.实施例三,在支撑柱1的外侧安装警示牌,警示牌对游客警示,也可以在支撑柱1中间内侧中间位置安装杀虫灯,杀虫灯对蔓藤与草丛内的害虫杀杀除。
65.实施例四,在第一定位套筒3的底部设置挤压块,将挤压块设置为圆弧结构,在第
二定位套筒5的上方也设置挤压块,第一定位套筒3和第二定位套筒5的挤压块呈交错状态分布,使挤压块与连接杆8相接触,在连接杆8转动时挤压块对连接杆8进行挤压,两组挤压块相配合使得连接杆8上下移动,从而使清洁面更好的对支撑柱1外侧的灰尘擦除。
66.本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1