灯具定位方法、装置、灯具和存储介质与流程
本申请涉及灯具控制,特别是涉及一种灯具定位方法、装置、灯具和存储介质。
背景技术:
1、舞台灯具的摇头组件可以在驱动电机的带动下进行旋转,从而带动舞台灯具的发光元件旋转,以使舞台灯具的光线可以照射到各个方向,为了实现对舞台灯具的控制,需要对舞台灯具的摇头组件进行定位,确定舞台灯具摇头组件当前所处的位置。
2、目前,对舞台灯具摇头组件进行定位的方法需要在舞台灯具开机时进行旋转探测确定摇头组件的位置,但是这种方式需要旋转摇头组件,耗时较长,且舞台灯具在旋转探测过程中可能导致碰撞从而导致摇头组件的损坏。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够不需要旋转探测,节省定位时间的灯具定位方法、装置、灯具和存储介质。
2、第一方面,本申请提供了一种灯具定位方法,包括:
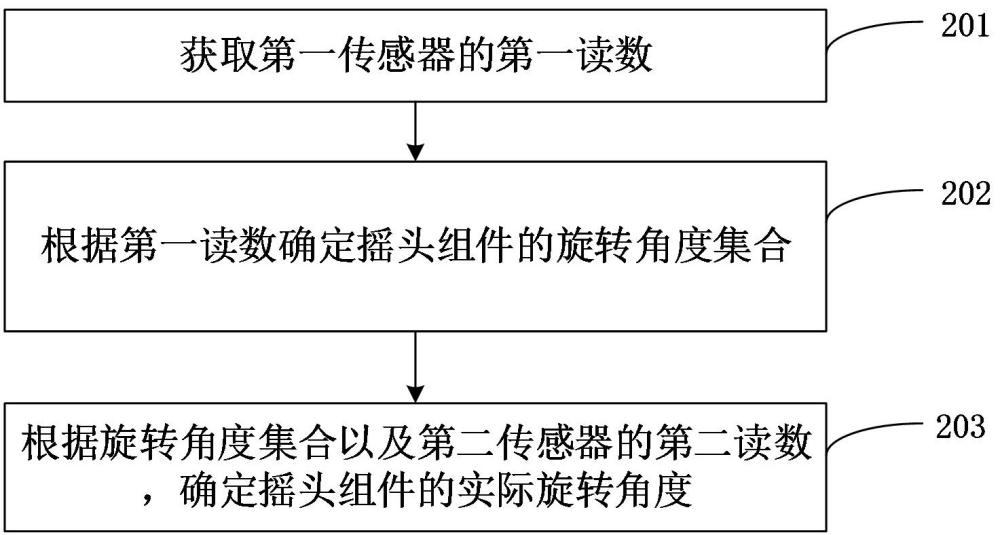
3、获取第一传感器的第一读数,所述第一传感器用于测量所述灯具的摇头组件连接的第一带轮的旋转角度,所述摇头组件用于在所述第一带轮的转动下带动所述灯具的发光元件旋转;
4、根据所述第一读数确定所述摇头组件的旋转角度集合,所述旋转角度集合包括所述摇头组件当前可能的至少一个旋转角度;
5、根据所述旋转角度集合以及第二传感器的第二读数,确定所述摇头组件的实际旋转角度,所述第二传感器用于测量所述灯具的电机连接的第二带轮的旋转角度,所述第二带轮与所述第一带轮通过同步带连接,所述第二带轮用于在所述电机的驱动下带动所述第一带轮旋转。
6、在其中一个实施例中,所述根据所述第一读数确定所述摇头组件的旋转角度集合,包括:
7、获取所述摇头组件的最大可旋转角度;
8、根据所述最大可旋转角度以及所述第一读数,确定所述旋转角度集合。
9、在其中一个实施例中,所述根据所述最大可旋转角度以及所述第一读数,确定所述旋转角度集合,包括:
10、根据所述第一读数以及第一预设偏差值,确定第一旋转角度,所述第一预设偏差值用于表征所述第一传感器的零点位置与所述第一带轮的零点位置的偏差;
11、根据所述第一旋转角度以及所述最大可旋转角度,确定所述旋转角度集合。
12、在其中一个实施例中,所述根据所述第一旋转角度以及所述最大可旋转角度,确定所述旋转角度集合,包括:
13、对所述第一旋转角度和圆周角进行取余逆运算处理,得到至少一个第二旋转角度;
14、将所述至少一个第二旋转角度中小于所述最大可旋转角度的第二旋转角度组成所述旋转角度集合。
15、在其中一个实施例中,所述根据所述旋转角度集合以及第二传感器的第二读数,确定所述摇头组件的实际旋转角度,包括:
16、计算所述旋转角度集合中各第二旋转角度对应的所述第二传感器的传动关联角度;
17、根据所述旋转角度集合中各第二旋转角度和所述第二传感器的传动关联角度的对应关系生成旋转角度对应关系集合;
18、根据所述第二读数与所述旋转角度对应关系集合,确定所述实际旋转角度。
19、在其中一个实施例中,所述根据所述第二读数与所述旋转角度对应关系集合,确定所述实际旋转角度,包括:
20、根据所述第二读数与所述旋转角度对应关系集合中的各所述第二传感器的传动关联角度进行匹配;
21、将匹配成功的所述第二传感器的传动关联角度对应的第二旋转角度确定为所述实际旋转角度。
22、在其中一个实施例中,所述同步带的传动比为非整数。
23、第二方面,本申请还提供了一种灯具定位装置,包括:
24、获取模块,用于获取第一传感器的第一读数,所述第一传感器用于测量所述灯具的摇头组件连接的第一带轮的旋转角度,所述摇头组件用于在所述第一带轮的转动下带动所述灯具的发光元件旋转;
25、第一确定模块,用于根据所述第一读数确定所述摇头组件的旋转角度集合,所述旋转角度集合包括所述摇头组件当前可能的至少一个旋转角度;
26、第二确定模块,用于根据所述旋转角度集合以及第二传感器的第二读数,确定所述摇头组件的实际旋转角度,所述第二传感器用于测量所述灯具的电机连接的第二带轮的旋转角度,所述第二带轮与所述第一带轮通过同步带连接,所述第二带轮用于在所述电机的驱动下带动所述第一带轮旋转。
27、第三方面,本申请还提供了一种灯具,包括:
28、摇头组件,所述摇头组件与第一带轮连接,所述第一带轮上设置有第一传感器,所述摇头组件用于在所述第一带轮的转动下带动所述灯具的发光元件旋转,所述第一传感器用于测量所述摇头组件连接的第一带轮的旋转角度;
29、电机,所述电机与第二带轮连接,所述第二带轮上设置有第二传感器,所述第二带轮与所述第一带轮通过同步带连接,所述第二带轮用于在所述电机的驱动下带动所述第一带轮旋转,所述第二传感器用于测量所述电机连接的第二带轮的旋转角度;
30、驱动装置,用于计算所述摇头组件的实际旋转角度,所述实际旋转角度是根据旋转角度集合以及第二传感器的第二读数确定的,所述旋转角度集合是根据所述第一传感器的第一读数确定的。
31、在其中一个实施例中,所述第一传感器和所述第二传感器为转角编码器。
32、在其中一个实施例中,所述第一带轮的齿数大于所述第二带轮的齿数。
33、第四方面,本申请还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面任一所述的灯具定位方法。
34、第五方面,本申请还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述第一方面任一所述的灯具定位方法。
35、上述灯具定位方法、装置、灯具和存储介质,首先,获取第一传感器的第一读数,第一传感器用于测量灯具的摇头组件连接的第一带轮的旋转角度,摇头组件用于在第一带轮的转动下带动灯具的发光元件旋转,然后,根据第一读数确定摇头组件的旋转角度集合,旋转角度集合包括摇头组件当前可能的至少一个旋转角度,最后,根据旋转角度集合以及第二传感器的第二读数,确定摇头组件的实际旋转角度,第二传感器用于测量灯具的电机连接的第二带轮的旋转角度,第二带轮与第一带轮通过同步带连接,第二带轮用于在电机的驱动下带动第一带轮旋转。这样,在需要进行定位时,通过第一传感器的第一读数和第二传感器的第二读数即可以计算得到灯具的摇头组件的实际旋转角度,根据摇头组件的实际旋转角度可以确定摇头组件的实际位置,不需要对摇头组件进行旋转探测,从而节约对灯具的摇头组件定位的时间。
技术特征:
1.一种灯具定位方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述第一读数确定所述摇头组件的旋转角度集合,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述最大可旋转角度以及所述第一读数,确定所述旋转角度集合,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述第一旋转角度以及所述最大可旋转角度,确定所述旋转角度集合,包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述旋转角度集合以及第二传感器的第二读数,确定所述摇头组件的实际旋转角度,包括:
6.根据权利要求5所述的方法,其特征在于,所述根据所述第二读数与所述旋转角度对应关系集合,确定所述实际旋转角度,包括:
7.根据权利要求1所述的方法,其特征在于,所述同步带的传动比为非整数。
8.一种灯具定位装置,其特征在于,所述装置包括:
9.一种灯具,其特征在于,所述灯具包括:
10.根据权利要求9所述的灯具,其特征在于,所述第一带轮的齿数大于所述第二带轮的齿数。
11.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本申请涉及一种灯具定位方法、装置、灯具和存储介质。所述方法包括:获取第一传感器的第一读数,第一传感器用于测量灯具的摇头组件连接的第一带轮的旋转角度,摇头组件用于在第一带轮的转动下带动灯具的发光元件旋转,根据第一读数确定摇头组件的旋转角度集合,旋转角度集合包括摇头组件当前可能的至少一个旋转角度,根据旋转角度集合以及第二传感器的第二读数,确定摇头组件的实际旋转角度,第二传感器用于测量灯具的电机连接的第二带轮的旋转角度,第二带轮与第一带轮通过同步带连接,第二带轮用于在电机的驱动下带动第一带轮旋转。采用本方法节约对灯具的摇头组件定位的时间。
技术研发人员:刘建华,刘敏,王惠均,陈灿林,李四方
受保护的技术使用者:广州彩熠灯光股份有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!