一种设备装配系统及方法与流程
1.本技术涉及数据中心技术领域,尤其涉及到一种设备装配系统及方法。
背景技术:
2.服务器作为数据中心的关键部件,对于服务器的硬件的维护也是数据中心维护工作中重要的一部分。对于服务器硬件的维护主要发生在以下场景:故障维护、部件变更和扩容以及废弃服务器的部件回收等。由于服务器部署于机柜,因此,进行上述维护工作时都需要对服务器进行上下架的操作。目前主要依赖于人工处理机柜上下架的问题,例如人工操作辅助设备来进行服务器的上下架过程。而随着服务器重量的增加以及服务器密度提升带来的机柜高度升高,使得机柜上下架的操作变得困难起来,费时费力,且存在一定的安全隐患。
技术实现要素:
3.本技术提供了一种设备装配系统及方法,用于实现数据中心的机柜的装置的自动上下架,提高数据中心维护效率和安全性,降低人力成本。
4.第一方面,本技术提供了一种设备装配系统,包括控制装置、移动装置、升降装置和插拔装置,其中,控制装置用于根据运维指令控制上述移动装置、升降装置和插拔装置来完成运维指令的操作。具体的,运维指令用于指示上述设备装配系统完成设备装配的操作。其中,移动装置在控制装置的控制下,用于将上述设备装配系统移动至第一位置,该第一位置用于标识设备装配的机柜,也就是说,移动装置将设备装配系统移动至需要进行操作的机柜的附近,上述第一位置具体指的是能够对机柜内的待插拔设备进行操作的位置。升降装置用于在第一方向将插拔装置移动至目标位置,该目标位置为上述机柜中存放上述需要进行装配的设备的位置,具体可以为机柜的槽位,上述第一方向垂直于地面。上述插拔装置用于将需要装配的设备放置在上述目标位置,或者,从上述目标位置获取上述设备。具体的,上述机柜可以包括多个槽位,每个槽位都可以容纳有需要装配的设备,该设备具体可以指机柜中任意类型的设备,例如,计算设备(如服务器)、网络设备(如交换机)、存储设备(如存储阵列)和能源设备(如电池和电源)。该方案则可以利用设备装配系统实现机柜的待插拔设备的自动化装配,具体可以指待插拔设备在机柜的上架和下架,不仅降低了人为操作的难度,提高了效率,还可以消除人为操作时对操作人员存在的安全风险,尤其适合应用于机柜具有高层槽位的场景。
5.上述设备装配系统中的移动装置可以包括导航设备,从而根据控制装置的控制,可以导航至上述第一位置;升降装置固定安装于移动装置,且升降装置具有插拔装置安装架,用于安装插拔装置,升将装置驱动上述插拔装置安装架沿第一方向移动,从而可以驱动插拔装置沿第一方向移动,以使插拔装置与机柜的目标位置相对;插拔装置包括位姿调整机构、插拔机构、第一视觉机构和第一传感器,其中,位姿调整机构与插拔机构连接,驱动插拔机构调整位姿,使得插拔机构与机柜的目标位置对准,该目标位置为当前槽位;第一视觉
机构和/或第一传感器获取当前槽位的位姿信息,以便于控制装置能够控制位姿调整机构调整插拔机构的位姿,使插拔机构与槽位对准;第一视觉机构还用于获取当前槽位号和当前待插拔设备编码,以使控制装置能够校验当前槽位为需要进行装配的槽位,当前的待插拔设备为需要进行装配的设;上述控制装置与移动装置、升降装置和插拔装置分别连接,用于控制移动装置移动至第一位置;控制升降装置驱动插拔装置沿第一方向移动至目标位置;根据当前槽位的位姿信息和插拔机构的实际位姿信息,控制位姿调整机构调整插拔机构的位姿,控制插拔机构将待插拔设备插入当前槽位,或者,控制插拔机构将待插拔设备从当前槽位拔出,以实现待插拔设备在机柜中的自动化装配。
6.具体的技术方案中,上述移动装置还包括支撑脚机构,该支撑脚机构用于在第一位置支撑设备装配系统,以使设备装配系统可靠且稳定的固定在第一位置,防止设备转配系统在第一位置发生移动。具体的,上述支撑脚机构包括第一驱动组件和支撑脚,上述第一驱动组件与支撑脚连接,驱动支撑脚沿第一方向伸缩,支撑脚能够朝向地面伸出,支撑设备装配系统。也就是说,在移动装置移动过程中,支撑脚收回移动装置内部,不会阻碍移动装置的移动。而移动装置移动至第一位置,需要停在第一位置,此时第一驱动组件驱动支撑脚伸出移动装置,支撑于地面,使插拔装置进行插拔动作时,不易移动。
7.此外,上述支撑脚机构还可以用于调平设备装配系统,也就是调节设备装配系统沿第一方向的竖直角度,从而适应地面不平或者机柜存在一定的竖直偏斜的情况,都可以使设备装配系统与机柜保持平行,以便于提高设备装配系统的装配精度。具体的上述支撑脚机构包括至少四个支撑脚,以及与支撑脚一一对应连接的第一驱动组件,上述四个支撑脚形成移动装置的面支撑,每个第一驱动组件与控制装置连接,也就是说每个支撑脚都独立驱动。可以根据实际情况调节每个支撑脚伸出移动装置的长度,以实现调平的目的。
8.上述升降装置还可以包括握把机构,该握把机构用于连接机柜与设备装配系统。也就是说,设备装配系统移动至第一位置时,利用握把机构将机柜与设备装配系统固定连接成一个整体,以防止机柜或者设备装配系统在进行设备装配的过程中出现倾倒的情况。上述握把机构具体可以包括第四驱动组件和握把勾手,第四驱动组件驱动握把勾手与机柜固定连接。
9.具体的技术方案中,上述握把机构的端部包括第一壁面,该第一壁面设置有位置传感器,用于监测第一端面与机柜之间的距离,当第一端面与机柜之间的距离小于设定值时,发出提醒信号。控制装置与上述位置传感器和第四驱动组件分别连接,控制装置用于根据位置传感器的提醒信号,控制第四驱动组件驱动握把勾手与机柜固定连接。从而可以可靠的握把勾手与机柜固定连接。
10.具体设置上述插拔机构时,上述插拔机构包括待插拔设备容纳架、第九驱动组件和至少一组勾手臂,待插拔设备容纳架用于容纳上述待插拔设备;每组勾手臂包括沿第三方向相对设置的两个勾手臂,每组勾手臂的两个勾手臂位于待插拔设备容纳架的两端,从而便于从待插拔设备的两侧与待插拔设备连接,以移动待插拔设备的位置,例如将待插拔设备从机柜拉出至待插拔设备容纳架,或者将待插拔设备从待插拔设备容纳架推至机柜。每个上述勾手臂具有与待插拔设备适配的勾手,上述第九驱动组件与控制装置连接,控制装置控制上述第九驱动组件,驱动勾手臂沿第二方向伸缩,将位于待插拔设备容纳架的待插拔设备插入目标位置,或者,将位于目标位置的待插拔设备拔出至待插拔设备容纳架。上
述第一方向、第二方向和第三方向两两垂直,相当于三维直角坐标系的三个方向。
11.具体的技术方案中,上述插拔机构包括n组勾手臂,n≥2,上述n组勾手臂沿第一方向排布,至少n-1组勾手臂与第十驱动组件连接,第十驱动组件驱动至少n-1组勾手臂中至少一组勾手臂伸出和收回,用于适配沿第一方向厚度不同的所述待插拔设备。也就是说,至少有n-1组勾手臂参与装配操作或者不参与装配操作,可以根据实际的待插拔设备的结构进行原则,例如,对于服务器的装配操作,同一个设备装配系统,通过选择伸出的勾手臂数量,可以适应于1u、2u和4u等不同规格的服务器。
12.具体的,上述第十驱动组件包括驱动电机、与驱动电机连接的转轴,以及与上述至少n-1组勾手臂一一对应连接的复位件。其中,转轴上设置有与上述至少n-1组勾手臂一一对应的凸轮,上述凸轮驱动所述勾手臂伸出,复位件驱动勾手臂收回。该方案中第十驱动组件的结构较为简单,占用的空间较少。
13.另一种技术方案中,上述第十驱动组件可以包括与上述至少n-1组勾手臂一一对应的驱动结构,每个驱动结构都与控制装置连接,从而控制装置独立控制上述至少n-1组勾手臂的伸出和收回。
14.上述勾手臂的端部还可以设置滚轮,滚轮能够与待插拔设备相抵,已消除待插拔设备与机柜之间的抵接力,便于实现待插拔设备与机柜的结锁。
15.此外,上述勾手臂的端面可以设置关机部件,具体可以为凸起结构,在勾手臂勾取待插拔设备时,关机部件能够对待插拔设备进行关机。防止由于待插拔设备无法实现远程关机,强制拆除待插拔设备可能造成待插拔设备损坏或者数据丢失等问题。
16.上述移动装置还可以包括位于周侧的安全触边,移动装置还包括导航组件,安全触边与导航组件连接。上述安全触边内部具有第二传感器,当安全触边碰撞到障碍物时,第二传感器可以触发信号,导航组件根据安全触边的信号控制移动装置换向或者停止运动。从而可以防止移动装置碰撞地面的零碎部件等。主要针对位于地面较小的零部件,难以被导航组件发现,可以提高移动装置移动过程的可靠性。
17.具体设置上述升降装置时,升降装置可以包括第二驱动组件、第一门架、第二门架和第三门架,其中第一门架固定于移动装置,插拔装置安装架安装于第三门架;上述第一门架与第二门架之间直线传动件连接,第二驱动组件与所述直线传动件连接,驱动第二门架相对于第一门架沿第一方向移动。第一门架与第三门架绳排机构连接,该绳排机构包括链条和滑轮,链条的两端分别与第三门架和第一门架连接,滑轮安装于第二门架,第二门架位于第一门架和第三门架之间。从而第二驱动组件驱动第二门架相对于第一门架沿第一方向移动时,可以同时驱动第三门架沿第一方向移动,可以提高升降装置的传动比。此外,利用门架作为升降装置,其结构稳定性较好,不易倾覆。
18.为了提高插拔装置沿第一方向的灵活性,可以使插拔装置安装架与第三门架之间设置第三驱动组件,该第三驱动组件驱动插拔装置安装架相对于第三门架沿第一方向移动。也就是说,升降装置可以对插拔装置实现多层次的升降。
19.具体设置上述位姿调整机构时,上述位姿调整机构包括依次设置的第一部、第二部、第三部、第四部和第五部,第一部固定安装于插拔装置安装架,第一部和第二部之间连接有第五驱动组件,第五驱动组件驱动第二部相对于第一部以第一方向为轴转动;第二部和第三部之间连接有第六驱动组件,第六驱动组件驱动第三部相对于第二部沿第二方向移
动;第三部的一端和第四部的一端铰接,第三部与所述第四部的铰接轴沿第二方向延伸,第三部的另一端和第四部的另一端连接有第七驱动组件,第七驱动组件驱动第四部相对于第三部摆动;第五部和第四部之间连接有第八驱动组件,第八驱动组件驱动第五部相对于第四部沿第三方向移动;第五驱动组件、第六驱动组件、第七驱动组件和第八驱动组件分别与控制装置连接,第一方向、第二方向和第三方向两两垂直。该方案中,位姿调整结构可以调整插拔装置在三维坐标体系中任何方向的位置,以使插拔装置的位姿与目标位置的位姿以较高的精度对准。
20.第一方面,本技术提供了一种设备装配方法,该方法包括以下步骤:
21.控制装置接收运维指令,该运维指令包括操作类型、机柜号、槽位号和待插拔设备编码;
22.控制装置根据运维指令,控制移动装置移动至第一位置,第一位置用于标识设备装配的机柜;
23.控制装置控制第一视觉机构扫描获取当前机柜号,并校验当前机柜号与运维指令中的机柜号是否一致;
24.控制装置校验当前机柜号与运维指令中的机柜号一致后,控制升降装置驱动插拔装置沿第一方向移动至目标位置,目标位置为机柜中存放设备的槽位,第一方向垂直于地面;
25.控制装置控制第一视觉机构扫描获取当前槽位号和当前待插拔设备编码,并校验当前槽位号和当前待插拔设备编码,与运维指令中的槽位号和待插拔设备编码是否一致;
26.控制装置校验当前槽位号和当前待插拔设备编码,与运维指令中的槽位号和待插拔设备编码一致后,获取当前槽位的位姿信息和插拔机构的当前位姿信息,根据当前槽位的位姿信息和插拔机构的当前位姿信息,控制插拔装置的位姿调整机构调整插拔机构的位姿,使插拔机构的勾手臂与槽位对齐;
27.控制装置控制勾手臂伸出,将待插拔设备插入槽位,或者,将槽位内的待插拔设备拔出。
28.该方案利用设备装配系统实现机柜的待插拔设备的自动化装配,具体可以指待插拔设备在机柜的上架和下架,不仅降低了人为操作的难度,提高了效率,还可以消除人为操作时对操作人员存在的安全风险,尤其适合应用于机柜具有高层槽位的场景。
29.在移动装置移动至第一位置之后,上述控制装置还可以控制支撑脚机构的至少四个支撑脚伸出,并调平移动装置。该方案中,利用支撑脚机构支撑设备装配系统,可以提高设备装配系统的稳定性,且可以利用上述支撑机构调平移动装置。上述调平移动装置可以指使设备装配系统与机柜平行,也可以指移动装置呈水平状态,也就是说设备装配系统远离移动装置的延伸方向垂直于地面。以便于提高插拔装置与槽位的对准精度。
30.此外,在升降装置驱动插拔装置沿第一方向移动至目标位置之后,上述控制装置还可以控制握把机构的握把勾手与承载待插拔设备的机柜固定连接。该方案可以使设备装配系统与机柜形成为整体结构,防止设备装配系统工作过程中,设备装配系统或者机柜出现倾倒的情况。
附图说明
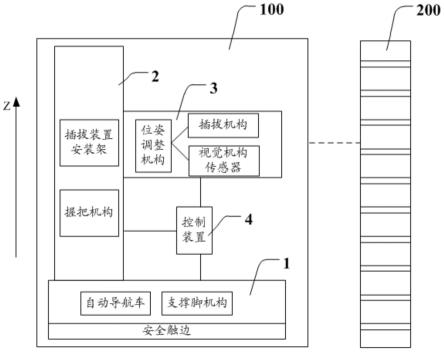
31.图1为本技术实施例中设备装配系统的框架示意图;
32.图2为本技术实施例中设备装配系统的结构示意图;
33.图3为本技术实施例中移动装置的一种结构示意图;
34.图4为本技术实施例中移动装置的另一种结构示意图;
35.图5为本技术实施例中升降装置的一种结构示意图;
36.图6为本技术实施例中升降装置的一种局部结构示意图;
37.图7为本技术实施例中升降装置的另一种局部结构示意图;
38.图8为本技术实施例中握把机构的一种结构示意图;
39.图9为本技术实施例中握把机构的另一种结构示意图;
40.图10为本技术实施例中插拔装置的一种结构示意图;
41.图11为本技术实施例中位姿调整机构的一种局部结构示意图;
42.图12为本技术实施例中位姿调整机构的另一种局部结构示意图;
43.图13为本技术实施例中位姿调整机构的另一种局部结构示意图;
44.图14为本技术实施例中位姿调整机构的另一种局部结构示意图;
45.图15为本技术实施例中插拔机构的一种局部结构示意图;
46.图16为本技术实施例中插拔机构的另一种局部结构示意图;
47.图17为本技术实施例机柜中装置上下架的方法的流程图。
48.附图标记:
49.100-设备装配系统;1-移动装置;11-自动导航车;111-底座;112-舵轮;113-万向轮;114-驱动结构;115-导航组件;116-激光雷达;117-安全触边;12-支撑脚机构;2-升降装置;21-插拔装置安装架;22-第二驱动组件;23-第一门架;24-第二门架;25-第三门架;26-直线传动件;27-绳排结构;271-链条;272-滑轮;28-握把机构;281-第四驱动组件;2811-伸出电机;2812-握扣电机;282-握把勾手;283-第一壁面;284-伸出部;3-插拔装置;31-位姿调整机构;311-第一部;312-第二部;313-第三部;314-第四部;315-第五部;316-第五驱动组件;3161-电机;3162-回转支撑内轴;3163-回转支撑外轴;317-第六驱动组件;318-第七驱动组件;319-第八驱动组件;32-插拔机构;321-待插拔设备容纳架;3211-滚轮链条;322-第九驱动组件;323-勾手臂;3231-勾手;3232-滚轮;3233-关机部件;324-第十驱动组件;3241-转轴;3242-凸轮;33-第一视觉机构;34-第一传感器;4-控制装置;200-机柜;201-固定杆。
具体实施方式
50.随着服务器算力和密度的增加,服务器的重量也随之增加。在数据中心运维管理时,若采用人工对服务器进行上下架操作,费时费力。特别是位于高处的服务器,还可能存在倾倒的安全隐患。本技术提供的设备可以有效解决以上问题,避免由于人工操作带来数据中心的运维的实施难度大、效率低、安全性差和成本高的问题。本技术提供一种设备装配的系统,用于在数据中心实现待装配设备的自动装配,具体地,包括对待装配的设备进行上架和下架操作,其中,待装配的设备可以是机柜中任意类型的设备,例如,计算设备(如服务器)、网络设备(如交换机)、存储设备(如存储阵列)和能源设备(如电池和电源)。本技术中
的机柜指的是任何可以盛装设备的柜子。上架是指将待装配设备放置在机柜的指定操作,下架则是指将机柜中指定位置的待装配设备从机柜中拔出。
51.为了便于描述,本技术以下实施例和附图中主要以待插拔设备为服务器,并实现服务器在机柜中装配,实现自动上架和下架操作为例进行说明。此外,设备装配系统实际装配的设备不是服务器时,系统的各个装置中依赖待插拔设备的具体结构的细节可以进行适配设计,例如用于承载待插拔设备的待插拔设备容纳架的结构细节,勾手臂的结构细节等等。
52.图1为本技术实施例中设备装配系统的框架示意图,图2为本技术实施例中设备装配系统的结构示意图,如图1和图2所示,设备装配系统100包括移动装置1、升降装置2、插拔装置3和控制装置4,其中,控制装置4与移动装置1、升降装置2和插拔装置3分别连接,用于控制上述移动装置1、升降装置2和插拔装置3进行自动化动作,具体包括移动装置1自动化移动至第一位置,升降装置2自动化将插拔装置升降至目标位置,插拔装置3自动化将待插拔设备插入目标位置或者从目标位置取出。上述移动装置1,用于将设备装配系统移动至第一位置,具体包括导航设备(例如,自动导航车11(agv,automated guided vehicles)),在控制装置4的控制下,结合自动导航车11的导航机构,移动装置1可以移动至第一位置,以对该站点的待插拔设备3进行插拔操作。上述升降装置2用于在第一方向将插拔装置移动至目标位置,该目标位置为机柜中存放设备的位置,具体可以为槽位。升降装置2具体安装于移动装置1,连接有插拔装置安装架21。插拔装置3用于将上述设备放置在上述目标位置,或者,从上述目标位置获取上述设备,插拔装置3具体安装于该插拔装置安装架21。升降装置2可以驱动插拔装置安装架21沿第一方向z移动,也就是,升降装置2可以驱动插拔装置3沿第一方向z升降,上述第一方向z垂直于地面。控制装置4控制上述升降装置2驱动插拔装置3升降至设定位置,该设定位置具体可以为插拔机构32与待插拔设备所在的槽位相对位置。从而使插拔装置3沿第一方向z与待插拔设备所在的槽位相对,以便于进行后续的插拔动作。该方案则可以利用设备装配系统100实现机柜200的待插拔设备的上下架,不仅降低了人为操作的难度,提高了效率,还可以消除人为操作时对操作人员存在的安全风险,尤其适合应用于机柜200具有高层槽位的场景。
53.插拔装置3具体包括位姿调整机构31、插拔机构32、第一视觉机构33和第一传感器34,其中,插拔机构32实现待插拔设备的具体插拔动作,位姿调整机构31与插拔机构32连接,用于调整插拔机构32在三维坐标体系内各个维度的具体位姿,以使插拔机构32能够具有较为精准的对位精度,具体可以实现毫米以下的对准精度,提高插拔操作的精确性,也可以减少出现不必要的碰撞,导致待插拔设备出现损坏。具体的,上述第一视觉机构33和/或第一传感器34可以获取当前槽位的位姿信息,控制装置4获取上述当前槽位的位姿信息,并根据上述当前槽位的位姿信息与插拔机构32的位姿信息,控制位姿调整机构31,调整插拔机构32的位姿,使得插拔机构32与机柜200的槽位以较高的精度相对。控制装置4还用于控制插拔机构32插拔待插拔设备,以实现机柜中装置自动化上下架的目的。上述第一视觉机构33还可以用于获取当前槽位号和当前待插拔设备编码,并将上述当前槽位号和当前待插拔设备编码,与需要进行上下架的槽位号和待插拔设备编码进行对比,只有当前槽位号与需要上下架的槽位号匹配,且当前待插拔设备编码与需要进行上下架的待插拔设备编码匹配时,才进行下一步的插拔操作,否则停止插拔操作且发出报警信号。以防止出现上下架错
误的问题。总之,本技术实施例中的设备装配系统100可以利用控制装置4与第一视觉机构33和第一传感器34的配合,实现机柜中装置自动化上下架,代替人为操作,效率高,稳定性好,且安全性也较高。
54.为了便于理解本技术中的设备装配系统100,下面结合附图和实施例,依次介绍各部分的可能的结构。图3为本技术实施例中移动装置的一种结构示意图,请参考图3,上述移动装置1包括自动导航车11,该自动导航车11包括底座111、舵轮112、万向轮113、驱动结构114和导航组件115,上述导航组件115与控制装置4连接,可以根据控制装置4的指令导航自动导航车11移动至第一位置。具体的实施例中,上述导航组件115可以包括激光slam(simultaneous localization and mapping,同步定位与地图构建),也就是移动装置1设置有激光雷达116,利用激光雷达116来实现自动导航车11的导航和避障,反应较为灵敏。此外,上述自动导航车11还可以包括第二视觉机构和/或第二传感器,控制装置4与上述第二视觉机构和第二传感器连接,可以根据上述第二视觉机构和第二传感器的信号,控制移动装置1避障或者急停,且可以在移动装置1到达第一位置附近之后,对移动装置1的位置进行微调,以提高移动装置1到第一位置的精确性。具体的,上述第二视觉机构和第二传感器等可以检测移动装置1移动路径中的障碍物以及地面上遗落的内存条等微小部件,从而避免碾压导致部件损坏,以及对装置和地面的破坏。例如,移动装置1的周侧设置安全触边117,该安全触边117具有弹性,且内部为第二传感器,当安全触边117触碰到障碍物时,触发信号,控制装置4接收上述安全触边117的信号,并根据安全触边117的信号控制移动装置1换向或者停止运动。上述导航组件115除了利用激光slam进行导航以外,还可以利用磁条和二维码进行导航,本技术对此不做限制。
55.移动装置1具体移动过程中,上述导航组件115根据控制装置4的指令,控制驱动结构114驱动舵轮112转动,以驱动自动导航车11移动。该实施例中,移动装置1包括两个舵轮112,分别位于移动装置1的前后方向,上述万向轮113设置于移动装置1的周侧,以提高移动装置1移动过程的灵活性和稳定性。
56.图4为本技术实施例中移动装置的另一种结构示意图,请结合图3和图4,移动装置1还可以包括支撑脚机构12,用于在第一位置支撑设备装配系统。上述支撑脚机构12包括第一驱动组件和支撑脚,具体包括多个支撑脚,多个支撑脚与第一驱动组件连接,第一驱动组件能够驱动支撑脚沿第一方向z伸缩。当移动装置1处于移动状态时,如图3所示,支撑脚处于收缩状态。当移动装置1移动至第一位置时,移动装置1需要停止固定于上述第一位置,第一驱动组件驱动支撑脚从底座111伸出,支撑于地面,如图4所示,从而支撑整个设备装配系统100。具体的,上述第一驱动组件可以包括电机或电缸,从而驱动支撑脚进行伸缩。该方案中,当设备装配系统100到达第一位置,需要进行机柜200的装置上下架操作时,第一驱动组件驱动支撑脚伸出底座111,支撑于地面。相对于舵轮112和万向轮113作为支撑结构,上述支撑脚作为支撑结构的稳定性较好,不易出现位置的移动,有利于提高设备装配系统100的安全性,和对准精度。
57.此外,为了提高移动装置1的支撑效果,支撑脚机构12至少包括四个支撑脚,当包括四个支撑脚时,四个支撑脚可以呈方形排布于底座111的四角,当然,还可以采用其它的排布方式,只要能够形成稳定的支撑结构即可。支撑机构还可以包括更多的支撑脚,以提高支撑稳定性。上述支撑脚组件还可以用于调节设备装配系统沿第一方向的竖直角度,上述
支撑脚可以具有一一对应的第一驱动组件,该第一驱动组件与控制装置4连接。具体的,控制装置4可以控制每个第一驱动组件驱动支撑脚伸出底座111的长度,从而可以通过调节支撑脚伸出底座111的长度,以适应地面不平或者机柜200安装不竖直的问题,上述机柜200安装不竖直指的是机柜的延伸方向与地面不垂直,也就是机柜沿第一方向的竖直角度不为零。该方案可以使设备装配系统100与机柜200保持平行,或者说使设备装配系统100保持设定的角度。该方案可以提高设备装配系统100插拔待插拔设备的成功率和可靠性,提高设备装配系统100的通用性。
58.图5为本技术实施例中升降装置的一种结构示意图,图6为本技术实施例中升降装置的一种局部结构示意图,图7为本技术实施例中升降装置的另一种局部结构示意图;结合图2、图5、图6和图7,升降装置2安装于移动装置1,具体可以包括第二驱动组件22、第一门架23、第二门架24和第三门架25。其中,第一门架23固定安装于移动装置1,插拔装置安装架21设置于第三门架25。上述第二驱动组件22可以包括直线传动件26,该直线传动件26位于第一门架23与第二门架24之间,例如,直线传动件26可以为丝杠组件或者滑块与滑轨配合的组件等。从而驱动第二门架24相对于第一门架23沿第一方向z移动。第二门架24设置于第一门架23与第三门架25之间,且第一门架23与第三门架25通过绳排结构27连接。如图6所示,一种实施例中,如图6和图7所示,上述绳排结构27包括链条271和滑轮272,链条271的两端分别与第二门架24和第一门架23连接,滑轮272位于第二门架24,在第二驱动组件22驱动第二门架24相对于第一门架23沿第一方向z移动时,第三门架25在绳排结构27的作用下,也沿第一方向z移动,如图7所示,第三门架25带动插拔装置安装架21上升状态。采用该结构,第二驱动组件22与控制装置4连接,控制装置4可以控制第二驱动组件22驱动第三门架25沿第一方向z移动设定距离,以使设置于插拔装置安装架21的插拔装置3与槽位等高,便于进行后续的插拔操作。该方案通过绳排结构27可以将第二驱动组件22实际驱动的移动距离增倍,减少相邻的门架之间的移动行程,提高结构的整体稳定性。
59.插拔装置安装架21可以固定安装于第三门架25,也可以通过第三驱动组件可移动安装于第三门架25,上述第三驱动组件可以驱动插拔装置安装架21相对于第三门架25沿第一方向z移动。该方案中,第三驱动组件可以在第三门架25位置固定后,再驱动插拔装置安装架21相对于第三门架25沿第一方向z移动,以提高插拔装置3在第一方向z的位置的灵活性和精确性。
60.上述升降装置2采用三级门架的方案,仅仅作为一种可能的实施方式,在具体实施时,只要升降装置2能够实现插拔装置安装架21沿第一方向z移动即可。
61.请参考图5,上述升降装置2还包括握把机构28,用于连接述机柜与设备装配系统,使机柜与设备装配系统形成为整体力学系统。图8为本技术实施例中握把机构的一种结构示意图,请参考图8,上述握把机构28包括第四驱动组件281和握把勾手282,当移动装置1带动设备装配系统100移动至第一位置之后,上述第四驱动组件281用于驱动握把勾手282与承载待插拔设备的机柜200固定连接,从而使设备装配系统100与机柜200固定为整体结构,将插拔动作产生的外部推力转化成为系统内部的内生力,从而可以降低机柜200以及设备装配系统100出现倾倒的概率,减轻插拔冲击力对设备装配系统100的影响,提升了设备装配系统100工作过程的稳定性和可靠性。
62.图9为本技术实施例中握把机构的另一种结构示意图,请参考图8和图9,具体的实
施例中,上述握把机构28的端部具有第一壁面283,上述第一壁面283设置有位置传感器,位置传感器和第四驱动组件281分别与控制装置4连接,控制装置4控制握把机构28朝向机柜200运动,位置传感器监测到机柜200时触发信号,控制装置4根据上述位置传感器的信号,控制第四驱动组件281驱动握把勾手282与机柜200固连,从而使设备装配系统100与机柜200固定成整体结构。不易出现倾倒的情况。
63.请参考图8和图9,具体的实施例中,第四驱动组件281包括伸出电机2811和握扣电机2812,握把机构28包括伸出部284和握把勾手282,握把勾手282与伸出部284铰接,伸出电机2811驱动伸出部284伸缩,握扣电机2812驱动握把勾手282摆动。第一壁面283位于伸出部284,当需要握把机构28与机柜200固连时,伸出电机2811驱动伸出部284朝向机柜200移动,当第一壁面283伸至机柜200设定位置时,例如,机柜200具有固定杆201,伸出部284与固定杆201相对,第一壁面283与固定杆201间隔设定距离时,位置传感器触发信号;控制装置4根据上述信号,控制握扣电机2812驱动握把勾手282摆动,使握把勾手282的勾手与第一壁面283形成夹持结构,夹持固定杆201,从而使握把机构28与固定杆201固定。
64.图10为本技术实施例中插拔装置的结构示意图,结合图2和图10,插拔装置3包括位姿调整机构31、插拔机构32、第一视觉机构33和第一传感器34,其中,位姿调整机构31用于调整插拔机构32在三维坐标系中多个维度的位姿,插拔机构32用于抓取待插拔设备,带动待插拔设备插入槽位或者从槽位拔出。位姿调整机构31安装于升降装置2的插拔装置安装架21,插拔机构32安装于位姿调整机构31,第一视觉机构33和第一传感器34安装于插拔机构32。控制装置4与第一视觉机构33、第一传感器34和位姿调整机构31分别连接,上述第一视觉机构33和第一传感器34用于获取当前插拔机构32的位置,以及待插拔设备或者说槽位的目标位置,控制装置4可以根据第一视觉机构33和第一传感器34的信息,计算得到当前插拔机构32的位置与目标位置的偏差,并控制位姿调整机构31调整插拔机构32在三维坐标系中多个维度的位姿,使插拔机构32的位置与待插拔设备或者说槽位相对,以提高插拔装置3动作的精确性,减少由于对位偏差导致的结构损坏等情况。
65.一种具体的实施例中,图11~图14为本技术实施例中位姿调整机构的局部结构示意图,请参考图10~图14,上述位姿调整机构31包括依次设置的第一部311、第二部312、第三部313、第四部314和第五部315,其中,第一部311固定安装于插拔装置安装架21,插拔机构32安装于第五部315。上述第一部311与第二部312之间连接有第五驱动组件316,第五驱动组件316驱动第二部312相对于第一步以第一方向z为轴转动,以调节插拔装置3转动角度,以使插拔机构32沿以第一方向z为轴的转动方向与目标位置对准。上述第二部312与第三部313之间连接有第六驱动组件317,第六驱动组件317驱动第三部313相对于第二部312沿第二方向y移动,从而调节插拔机构32沿第二方向y的调整位置,以使插拔机构32沿第二方向y与目标位置对准。第三部313包括第一端和第二端,第四部314包括第三端和第四端,上述第三部313的第一端与第四部314的第三端铰接,铰接轴沿第二方向y延伸;第三部313的第二端与第四部314的第四端之间连接有第七驱动组件318,第七驱动组件318驱动第四部314相对于第三部313摆动,从而调节插拔机构32的水平倾角,使插拔机构32与目标位置水平方向平行。上述第五部315与第四部314之间连接有第八驱动组件319,第八驱动组件319驱动第五部315相对于第四部314沿第三方向x移动,从而调节插拔机构32沿第三方向x的位置,以使插拔机构32沿第三方向x与目标位置对准。具体的,上述第五驱动组件316、第
六驱动组件317、第七驱动组件318和第八驱动组件319分别与控制装置4连接,控制装置4根据第一视觉机构33和第一传感器34的信号,控制上述第五驱动组件316、第六驱动组件317、第七驱动组件318和第八驱动组件319,从而从各个方向和角度调整插拔机构32的位置,以提高插拔机构32与目标位置的对准精度,提高插拔装置3工作的可靠性。具体的,上述第一方向z、第二方向y和第三方向x两两垂直。
66.具体的实施例中,上述第五驱动组件316、第六驱动组件317、第七驱动组件318和第八驱动组件319的设置顺序可以不同,例如,可以在第一部311与第二部312之间设置第六驱动组件317,调节第二部312相对于第一部311沿第二方向y的位置,总之,上述位姿调整机构31可以实现各个方向的位置调节,可以根据实际需求选择调节各个方向的驱动组件的位置。
67.具体的实施例中,请参考图11,上述第五驱动组件316可以包括电机3161、回转支撑内轴3162和回转支撑外轴3163,其中,回转支撑内轴3162与第二部312固定连接,回转支撑外轴3163与第一部311固定连接,回转支撑内轴3162与回转支撑外轴3163转动连接,例如回转支撑内轴3162与回转支撑外轴3163之间设置滚珠。请参考图12~图14,第六驱动组件317、第七驱动组件318和第八驱动组件319均为直线驱动组件,例如包括滑块和滑轨组件,气缸组件和丝杠组件等,本技术不做限制。此外,上述第五驱动组件316、第六驱动组件317、第七驱动组件318和第八驱动组件319中还可以包括限位块和光电传感器等限位结构,以防止各个部分结构过度运动而破坏自身结构或者其他部件。
68.图15为本技术实施例中插拔机构的一种局部结构示意图,结合图10和图15,上述插拔机构32包括待插拔设备容纳架321、第九驱动组件322和至少一组勾手臂323,待插拔设备容纳架321用于承载和容纳待插拔设备,上述每组勾手臂323包括两个相对设置的勾手臂323,上述两个勾手臂323沿第三方向x排布于待插拔设备容纳架321的两端,以使每组勾手臂323能够从待插拔设备的两侧与待插拔设备连接,以移动待插拔设备的位置,将位于待插拔设备容纳架的待插拔设备插入目标位置,或者,将位于目标位置的待插拔设备拔出至待插拔设备容纳架。上述第九驱动组件322与控制装置4连接,控制装置4控制第九驱动组件322驱动勾手臂323沿第二方向y伸缩,上述勾手臂323具有与待插拔设备适配的勾手3231,则可以使勾手臂323的勾手3231与待插拔设备卡合,拉动待插拔设备。以服务器为例,勾手臂323的勾手3231与服务器的拉钩适配,可以将位于机柜200的服务器拉至待插拔设备容纳架321并运动至设定位置。或者将位于待插拔设备容纳架321推送至机柜200的槽位内。
69.请参考图15,上述待插拔设备容纳架321包括滚轮链条3211,从而待插拔设备在待插拔设备安装架21上运动时,可以减少对待插拔设备的摩擦,一方面便于利用勾手臂323推拉位于待插拔设备容纳架321上的待插拔设备,另一方面,可以减少对待插拔设备的损伤。
70.图16为本技术实施例中插拔机构的另一种局部结构示意图,结合图10和图16,具体的实施例中,插拔机构32包括n组勾手臂323,n≥2,上述n组勾手臂323沿第一方向z排布,以适配不同规格和尺寸的待插拔设备,例如待插拔设备为服务器,则本技术设备装配系统100可以适配于不同u位的服务器,例如1u、2u和4u不同规格的服务器,其中,u位是一种表示服务器外部尺寸的单位,1u=44.45mm。上述n组勾手臂323中至少n-1组勾手臂323与第十驱动组件324连接,第十驱动组件324与控制装置4连接,控制装置4可以控制第十驱动组件324驱动上述至少n-1组勾手臂323中至少一组勾手臂323伸出和收回。该方案中,可以根据待插
拔设备的尺寸和规格,选择伸出对应的勾手臂323,以提高本技术设备装配系统100的兼容性。例如,对服务器的上下架过程中,当上下架1u的服务器时,可以仅保持一组勾手臂323伸出,其它勾手臂323收回,以进行插拔动作,且不会出现结构干涉。当上下架2u的服务器时,控制装置4可以控制第十驱动组件324驱动与已经处于伸出状态的勾手臂323相邻的勾手臂323伸出,从而两组勾手臂323共同动作,对2u的服务器进行上下架操作。总之可以根据待插拔设备控制对应的勾手臂323伸出即可。
71.具体形成上述第十驱动组件324时,可以使第十驱动组件324包括驱动电机(图中未示出)、转轴3241和复位件(图中未示出),上述转轴3241与驱动电机连接,驱动电机能够驱动转轴3241转动,转轴3241上设置有与上述至少n-1组勾手臂323一一对应的凸轮3242,凸轮3242包括圆弧的凸出部分,每个凸轮3242的凸出部分对应的圆心角不同,例如上述圆心角可以依次增加,勾手臂323具有与凸轮3242相抵的从动子,凸轮3242可以驱动从动子运动,从而驱动勾手臂323依次摆动伸出。上述复位件与上述至少n-1组勾手臂323一一对应连接,用于在凸轮3242非凸出部分与从动子相抵时,驱动勾手臂323复位收回。
72.或者,另一种实施例中,可以使第十驱动组件324包括与上述至少n-1组勾手臂323一一对应的驱动结构114,从而根据需求分别驱动对应的勾手臂323伸出即可。
73.上述勾手臂323的端部设置有滚轮3232,插拔机构32勾取待插拔设备时,上述滚轮3232可以与待插拔设备相抵,便于勾手臂323沿第二方向y按压待插拔设备,使待插拔设备与机柜200之间的卡扣脱离,从而勾手臂323的勾手3231能够将待插拔设备从机柜200的槽位中拉出。例如,待插拔设备为服务器,服务器与机柜200之间卡扣连接,且机柜200对服务器具有朝向设备装配系统100方向的抵压力,上述滚轮3232可以与服务器相抵,以抵消上述抵压力,便于解锁服务器与机柜200之间的卡扣。滚轮3232结构与服务器相抵,可以减少对服务器的损伤。
74.此外,上述勾手臂323的端面还设置有关机部件3233,该关机部件3233具体可以为凸起结构,能够对待插拔设备进行关机。当需要下架的待插拔设备仍处于带电状态时,例如,上述待插拔设备为服务器,且远程关机失败的场景下,控制装置4可以控制第九驱动组件322驱动勾手臂323沿第二方向y伸出,使关机部件3233与待插拔设备的关机按钮相抵至少m秒,从而实现强制关机断电的目的。具体的,上述m秒的具体值可以根据待插拔设备的性能进行设定。
75.下面结合机柜中装置上下架的方法实施例,来说明本技术实施例中设备装配系统100的具体使用过程。
76.图17为本技术实施例机柜中装置上下架的方法的流程图,请结合图1~图17,本技术实施例中机柜中装置上下架的方法利用上述实施例中的设备装配系统100实现,具体可以包括以下步骤:
77.步骤s101、控制装置4接收运维指令,该运维指令包括操作类型、机柜号、槽位号和待插拔设备编码。
78.上述操作类型具体可以包括上架指令和下架指令。控制装置首先识别操作类型,之后进行相应的上架操作或者下架操作。
79.步骤s102、控制装置4根据运维指令,控制移动装置1移动至第一位置,该第一位置用于标识设备装配的机柜。
80.该移动装置1可以为上述任一实施例中的移动装置1,包括有自动导航车11,可以根据站点的信息,自动行驶至上述第一位置。
81.步骤s103、控制装置4控制第一视觉机构33扫描获取当前机柜号,并校验当前机柜号与运维指令中的机柜号是否一致;
82.步骤s104、控制装置4校验上述当前机柜号与运维指令中的机柜号一致后,控制升降装置2驱动插拔装置3沿第一方向z移动至目标位置,目标位置为机柜中存放设备的槽位,第一方向z垂直于地面;
83.上述升降装置2沿第一方向z驱动插拔装置3,从而使插拔装置3的勾手臂323与需要进行上下架操作的槽位等高或者说基本等高。具体的实施例中,控制装置4可以根据运维指令中的槽位的信息,映射得到需要使插拔装置3处于第一方向z的位置,从而可以控制插拔装置3移动至上述设定位置。
84.步骤s105、控制装置4控制第一视觉机构33扫描获取当前槽位号和当前待插拔设备编码,并校验当前槽位号和当前待插拔设备编码,与运维指令中的槽位号和待插拔设备编码是否一致;
85.该方案中,对当前槽位号和待插拔设备编码进行校验,以保证操作的准确性,以防出现误操作。只有当前槽位号与运维指令中的槽位号匹配,且当前待插拔设备编码与运维指令中的待插拔设备编码匹配时,才进行下一步的插拔操作,否则停止插拔操作且发出报警信号,例如警报灯亮起或者蜂鸣器响起等,提醒操作人员进行处理。
86.步骤s106、控制装置4校验上述当前槽位号和当前待插拔设备编码,与运维指令中的槽位号和待插拔设备编码一致后,获取当前槽位的位姿信息和插拔结构的当前位姿信息,根据上述当前槽位的位姿信息和插拔机构的当前位姿信息,控制插拔装置3的位姿调整机构31调整插拔机构32的位姿,使插拔机构32的勾手臂323与所述槽位对齐;
87.该方案中,利用第一视觉机构33和/或第一传感器34的反馈信息,控制装置4可以控制位姿调整机构31在三维坐标体系内多个维度调整插拔机构32的位姿,可以提高插拔装置3的位置,以使勾手臂323与槽位对齐,具体可以的达到毫米级以下的对准精度,从而有利于提高插拔成功率和可靠性,不易损伤待插拔设备或者周围设置的结构。
88.步骤s107、控制装置4控制勾手臂323伸出,将待插拔设备插入槽位,或者,将槽位内的待插拔设备拔出。
89.当运维指令中的操作类型为上架任务时,设备装配系统100的插拔机构32运动待插拔设备至机柜200的槽位处,具体可以使插拔机构32具有待插拔设备容置架,待插拔设备容置在上述待插拔设备容置架。当插拔机构32的勾手臂323与槽位对齐或,勾手臂323可以带动上述待插拔设备,将待插拔设备插入槽位内,以实现机柜200的待插拔设备的上架。
90.当运维指令中的操作类型为下架任务时,设备装配系统100的插拔机构32的勾手臂323与槽位对准后,控制装置4控制勾手臂323伸出,并使勾手臂323的勾手3231与待插拔设备的拉钩卡合,将槽位内的待插拔设备拔出,并拉至插拔机构32的待插拔设备容纳架321;控制装置4再控制升降装置2驱动插拔装置3沿第一方向z复位,移动装置1带动待插拔设备运送至指定位置。
91.在步骤s102之后,进一步还可以包括步骤s1021、控制装置4控制支撑脚机构12的至少四个支撑脚伸出,并调平移动装置1。具体的,上述支撑脚具有一一对应的第一驱动组
件,该第一驱动组件与控制装置4连接。控制装置4控制每个第一驱动组件驱动支撑脚伸出底座111的长度,从而可以通过调节支撑脚伸出底座111的长度,以适应地面不平或者机柜200安装不竖直的问题,使设备装配系统100与机柜200保持平行,也就是说,本技术调平移动装置1指的是设备装配系统100与机柜200保持平行,或者任何满足需求的状态。使提高设备装配系统100插拔待插拔设备的成功率和可靠性,提高设备装配系统100的通用性。
92.在步骤s104之后,进一步还可以包括步骤s1041、控制装置4控制握把机构28的握把勾手282与承载待插拔设备的机柜200固定连接。该方案可以使设备装配系统100与机柜200固定为整体结构,将插拔动作产生的外部推力转化成为系统内部的内生力,从而可以降低机柜200以及设备装配系统100出现倾倒的概率,减轻插拔冲击力对设备装配系统100的影响,提升了设备装配系统100工作过程的稳定性和可靠性。
93.以上,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1