一种飞机蒙皮表面脱漆装备的制作方法
1.本实用新型涉及激光清洗技术,特别是涉及一种飞机蒙皮表面脱漆装备。
背景技术:
2.飞机蒙皮是指包围在飞机骨架结构外且用粘接剂或铆钉固定于骨架上,形成飞机气动力外形的维形构件。蒙皮承受空气动力作用后将作用力传递到相连的机身机翼骨架上,受力复杂,加之蒙皮直接与外界接触,所以不仅要求蒙皮材料强度高、塑性好,还要求表面光滑,有较高的抗蚀能力。常规飞机的蒙皮材料主要采用高强铝、镁合金,某些高性能飞机采用钛合金或复合材料。
3.飞机在使用一段时间后,会因为外力、太空辐射和各种气流冲刷等原因而导致蒙皮表面的漆层产生脱落、龟裂、老化等各种损伤,因此需要定期对飞机原有漆层进行去除,一般5年左右,还需要大修一次。在大修时,需要把表面涂层全部除掉,不仅是为了大修后重新涂漆以得到一个崭新的装饰涂层,更是为了检测发现铝蒙皮或结构件的缺陷和疲劳裂纹,从而避免飞机发生疲劳破坏事故。
4.对于去除蒙皮漆层的技术,国内目前普遍采用的是以二氯甲烷为主溶剂的脱漆剂除漆,这种方法虽然快速,但是由于飞机铝蒙皮表面涂层体系包括蒙面表面预处理、底漆层、面漆层等复杂结构,溶剂除漆不能实现精确分层去除涂层,且化学清洗有毒有污染、消耗量大而且成本很高。同时,由于如今应用于飞机的复合材料不断增多,溶剂除漆容易造成基材损伤,因此溶剂除漆方法受到很多限制。因此,如何精准的去除蒙皮漆层,并且不产生化学污染,是有待解决的问题。
技术实现要素:
5.本实用新型的目的是要提供一种飞机蒙皮表面脱漆装备,能在无化学污染的条件下精确去除蒙皮涂层。
6.为了实现上述目的,本实用新型提供了一种飞机蒙皮表面脱漆装备,包括:
7.行走装置;
8.升降装置,设置在所述行走装置上;
9.工业机器人,设置在所述升降装置上;
10.激光扫描头,设置在所述工业机器人上;
11.控制装置,控制连接所述行走装置、所述升降装置、所述工业机器人和所述激光扫描头;
12.清洗路径建模装置,连接所述控制装置。
13.优选的,上述的飞机蒙皮表面脱漆装备中,所述清洗路径建模装置,包括:
14.飞机当前外形数据的数据采集单元;
15.飞机原始外形数据的存储单元;
16.数据处理单元,连接所述数据采集单元和所述存储单元。
17.优选的,上述的飞机蒙皮表面脱漆装备中,所述数据采集单元为多个摄像头组成的摄像头阵列。
18.优选的,上述的飞机蒙皮表面脱漆装备中,所述数据处理单元为图形处理器或单片机。
19.优选的,上述的飞机蒙皮表面脱漆装备中,所述行走装置上还设置有操作台。
20.优选的,上述的飞机蒙皮表面脱漆装备中,所述控制装置包括:
21.激光控制单元,设置在所述操作台的上方;
22.行走控制单元,设置在所述操作台的下方;
23.集成控制单元,信号连接所述激光控制单元和所述行走控制单元。
24.优选的,上述的飞机蒙皮表面脱漆装备中,所述行走装置为自动导引运输车。
25.优选的,上述的飞机蒙皮表面脱漆装备中,所述升降装置为竖直设置的气缸或电动推杆。
26.本实用新型实施例具有以下技术效果:本实用新型实施例中,通过激光扫描头进行激光除漆,没有化学污染,清洗路径建模装置可以精确控制清洗路径,提高准确度和效率,通过控制装置可以控制激光的强度,精确清洗的深度。
27.根据下文结合附图对本实用新型具体实施例的详细描述,本领域技术人员将会更加明了本实用新型的上述以及其他目的、优点和特征。
附图说明
28.后文将参照附图以示例性而非限制性的方式详细描述本实用新型的一些具体实施例。附图中相同的附图标记标示了相同或类似的部件或部分。本领域技术人员应该理解,这些附图未必是按比例绘制的。附图中:
29.图1是本实用新型实施例的飞机蒙皮表面脱漆装备的部分结构示意图;
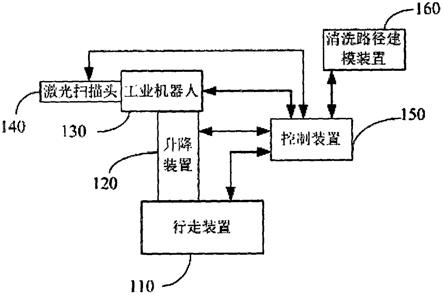
30.图2是本实用新型实施例的飞机蒙皮表面脱漆装备的原理结构示意图;
31.图3是本实用新型实施例的清洗路径建模装置的原理结构示意图;
32.图4是本实用新型实施例的清洗工作空间的示意图;
33.图5是本实用新型实施例的脱漆装备组合布置的示意图。
具体实施方式
34.图1是本实用新型实施例的脱漆装备的部分结构示意图,图2是原理结构示意图;如图1和图2所示,本实用新型实施例提供一种飞机蒙皮表面脱漆装备,包括:
35.行走装置110;
36.升降装置120,设置在所述行走装置110上;
37.工业机器人130,设置在所述升降装置120上;
38.激光扫描头140,设置在所述工业机器人130上;
39.控制装置150,控制连接所述行走装置110、所述升降装置120、所述工业机器人130和所述激光扫描头140;
40.清洗路径建模装置160,连接所述控制装置150。
41.可见,本实用新型实施例中,通过激光扫描头进行激光除漆,没有化学污染,清洗
路径建模装置160可以精确控制清洗路径,提高准确度和效率,通过控制装置150可以控制激光的强度,精确清洗的深度。
42.图3是本实用新型实施例的清洗路径建模装置的原理结构示意图;如图3所示,在本实用新型的一个实施例中,所述清洗路径建模装置,包括:
43.飞机当前外形数据的数据采集单元161;
44.飞机原始外形数据的存储单元162;
45.数据处理单元163,连接所述数据采集单元和所述存储单元。
46.其中,所述数据采集单元161为多个摄像头组成的摄像头阵列,用来拍摄待除漆飞机的外观形状。飞机原始外形数据的存储单元162为普通存储器,用来存储待除漆飞机的原始外形数据。飞机在提交清洗除漆前,一般都有该种型号的精确的设计图纸和数据,所以该数据可以提前存储在飞机原始外形数据的存储单元162中。而飞机在使用一段时间后,外形上可能产生一些细小的突变,比如坑洼点或者加挂了附加设备等等,所以要用摄像头阵列再拍摄一遍飞机外形,数据处理单元163找出这些外形突变点,在设计清洗路径的时候对这些突变点的清洗进行修正,而没有突变的位置可以按该种型号飞机的原始外形数据进行清洗路径规划。
47.对于摄像头阵列拍摄的视频数据的处理,可以采用图像识别技术进行突变点的比对查找,这些图像识别处理技术为成熟的已知技术,在此不再详述。
48.在本实用新型的一个实施例中,所述数据处理单元163可以为图形处理器或单片机,能够完成视频数据的分析和数据比对功能。
49.如图1所示,在本实用新型的一个实施例中,所述行走装置上还设置有操作台170。
50.图4是本实用新型实施例的清洗工作空间的示意图,如图4所示,在本实用新型的一个实施例中,待清洗除漆的飞机停放在由围挡墙壁401围成的清洗工作空间内,围挡墙壁401上安装有多个摄像头1611,多个摄像头1611组成该摄像头阵列。
51.如图1和图4所示,在本实用新型的一个实施例中,所述控制装置150包括:
52.激光控制单元151,设置在所述操作台170的上方;
53.行走控制单元152,设置在所述操作台170的下方;
54.集成控制单元153,信号连接所述激光控制单元151和所述行走控制单元152。其中,该集成控制单元153是设置在清洗工作空间之外的。
55.在本实用新型的一个实施例中,所述行走装置110为自动导引运输车,所述升降装置120为竖直设置的气缸或电动推杆。
56.图5是本实用新型实施例的脱漆装备组合布置的示意图,在本实用新型的一个实施例中,飞机蒙皮表面脱漆装备可以设置两台和多台,共同使用。
57.在使用两台脱漆装备时,其中的集成控制单元153可以仅采用一个,仅通过一个集成控制单元153来控制两台脱漆装备共同运作,并且在路径规划的时候,脱漆装备对称布局同步动作,因为飞机也是对称的,这种布局方式可以平衡激光清洗对飞机的单侧受力影响,可以提高精度。
58.由上可知,本实用新型具有以下优势:
59.1)本实用新型实施例中,通过激光扫描头进行激光除漆,没有化学污染,清洗路径建模装置可以精确控制清洗路径,提高准确度和效率,通过控制装置可以控制激光的强度,
精确清洗的深度。
60.2)本实用新型实施例中,清洗路径建模装置利用飞机当前外形数据和飞机原始外形数据可以精准的规划清洗路径。
61.至此,本领域技术人员应认识到,虽然本文已详尽示出和描述了本实用新型的多个示例性实施例,但是,在不脱离本实用新型精神和范围的情况下,仍可根据本实用新型公开的内容直接确定或推导出符合本实用新型原理的许多其他变型或修改。因此,本实用新型的范围应被理解和认定为覆盖了所有这些其他变型或修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1