一种激光-MIG复合焊设备的线缆支撑结构及焊接机器人的制作方法
一种激光
‑
mig复合焊设备的线缆支撑结构及焊接机器人
技术领域
1.本实用新型属于机器人应用领域,尤其涉及一种激光
‑
mig复合焊的线缆支撑结构及焊接机器人。
背景技术:
2.机器人激光
‑
mig复合焊结合了激光和电弧两个独立热源各自的优点(如激光热源具有搞得能量密度、极优的指向性及透明介质传导的特性,mig具有高的热
‑
电转化效率、低廉的设备成本、技术成熟等优点),而这结合后衍生出需要新的特点(例如,高能量密度、高能量利用率、高的电弧稳定性,较低的工装准备精度和待焊接工件表面质量等),使之成为具有极大应用前景的焊接方式。
3.目前,机器人激光
‑
mig复合焊的线缆、水管、气管大多采用扎带固定在机器人手臂上,这样既限制了机器人的运动范围,又容易折断线缆或水气管。
技术实现要素:
4.为了解决背景技术中机器人激光
‑
mig复合焊的线缆、水管、气管会限制机器人的运动范围,并且在机器人运动过程中容易折断线缆、水气管的问题,本实用新型提供了一种激光
‑
mig复合焊设备的的线缆支撑结构及焊接机器人。
5.本实用新型的具体技术方案是:
6.本实用新型提供了一种激光
‑
mig复合焊设备的线缆支撑结构,包括固定支架、竖直调节件、水平调节件以及弹簧平衡器;
7.竖直调节件的一端安装用于与复合焊设备固连的固定支架,竖直调节件的另一端与水平调节件的一端连接;
8.水平调节件的另一端设置弹簧平衡器;
9.弹簧平衡器的吊钩与用于捆扎线缆、水气管的扎带连接。
10.弹簧平衡器中钢丝绳伸出的长度由线缆、水气管负载重量决定。
11.进一步地,上述竖直调节件包括第一竖直管、第二竖直管以及第一锁紧螺钉;第一竖直管同轴套设在第二竖直管的外部;第一锁紧螺钉沿水平方向穿过第一竖直管侧壁后与所述第二竖直管侧壁接触。
12.进一步地,上述水平调节件包括第一水平管、第二水平管以及第二锁紧螺钉;第一水平管同轴套设在第二水平管的外部,且第一水平管的一端与第二竖直管固连;第二锁紧螺钉设置在第一水平管远离第二竖直管的一端,且第二锁紧螺钉沿水平方向穿过第一水平管侧壁后与所述第二水平管侧壁接触;第二水平管上安装弹簧平衡器;
13.进一步地,第二水平管采用挂钩与弹簧平衡器连接
14.进一步地,上述竖直调节件包括竖直支撑板,竖直支撑板上沿竖直方向开设有多个安装孔;水平调节件包括水平支撑板,水平支撑板上沿水平方向开设有水平腰形孔;水平支撑板一端通过螺钉螺母的连接方式安装于所述安装孔上。
15.进一步地,所述多个安装孔采用竖直腰形孔代替。
16.进一步地,水平支撑板采用挂钩与弹簧平衡器连接。
17.本实用新型还提供了一种焊接机器人,所述机器人本体为六关节机器人,所述六关节机器人的第三轴上安装上述线缆支撑结构。
18.本实用新型的有益效果在于:
19.1、本实用新型采用竖直调节件、水平调节件以及弹簧平衡器构成了简单实用的线缆支撑结构,通过该结构将扎带捆扎好的线缆、水气管吊起来,合理的对线缆、水气管进行布设,避免了焊接设备工作时,线缆、水气管容易损坏的问题,大大提升了设备工作的安全性和可靠性。
20.2、本实用新型的竖直调节件、水平调节件均采用伸缩杆或支撑板+调节孔的形式,实现了线缆支撑结构两个方向的调节,使得该支撑结构的适用于不同型号、尺寸的设备进行使用
21.3、本实用新型采用弹簧平衡器对线缆支撑结构进行悬挂,由于其自身具有保险装置,可避免悬挂的线缆、水气管坠落并且可以手动锁止被悬挂物的装置,弹簧平衡器的钢丝绳伸出长短由线缆、水、气管等负载重量决定,在不同时间,不同姿态,负载不一,伸出的钢丝绳长短就不一,它能自动伸出或回抽弹簧平衡器无电气或气动危险,使用安全可靠;弹簧平衡器节省空间,降低生产成本。
附图说明
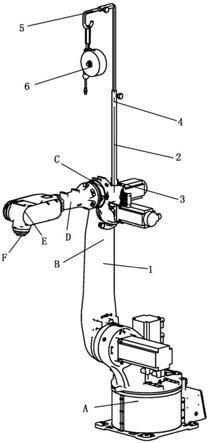
22.图1为线缆支撑结构在焊接机器人上实际应用的结构示意图;
23.图2为焊接机器人的各轴运动方向示意图。
24.图3为线缆支撑结构的第一种结构形式;
25.图4为线缆支撑结构的第二种结构形式。
26.附图标记如下:
[0027]1‑
六关节机器人、2
‑
线缆支撑结构、3
‑
固定支架、4
‑
竖直调节件、41
‑
第一竖直管、42
‑
第二竖直管、43
‑
第一锁紧螺钉、44
‑
竖直支撑板、45
‑
安装孔、5
‑
水平调节件、51
‑
第一水平管、52
‑
第二水平管、53
‑
第二锁紧螺钉、54
‑
水平支撑板、55
‑
水平腰形孔、6
‑
弹簧平衡器。
具体实施方式
[0028]
下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在有没做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0029]
在本实用新型的描述中,需要说明的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0030]
在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
[0031]
实施例
[0032]
本实施例提供了焊接机器人上应用线缆支撑结构的具体实例,如图1所示,该焊接机器人的本体为六关节机器人1,包括第一旋转轴a,第二旋转轴b、第三旋转轴c、第四旋转轴d,第五旋转轴e、第六旋转轴f;如图2所示,线缆支撑结构2安装于所述第三旋转轴c上(这样,焊接机器人的第四旋转轴d,第五旋转轴e、第六旋转轴f大幅度旋转时,线缆支撑结构是不运动的,避免了大幅度旋转的缠绕线的问题);线缆支撑结构2包括固定支架3、竖直调节件4、水平调节件5以及弹簧平衡器6;
[0033]
竖直调节件4的一端安装用于与第三旋转轴c固连的固定支架1,竖直调节件4的另一端与水平调节件5的一端连接;竖直调节件4的竖直方向长度可调其目的是为了使其高度满足机器人臂展的大小及线缆、水气管转弯半径的需求;
[0034]
水平调节件5的另一端设置弹簧平衡器6;水平调节件5的水平方向长度可调;
[0035]
弹簧平衡器6的吊钩与用于捆扎线缆、水气管的扎带连接。
[0036]
弹簧平衡器6中钢丝绳伸出的长度由线缆、水气管负载重量决定,弹簧平衡器
[0037]
本实施例中弹簧平衡器是一种吊挂重量较大的生产操作设备的辅助工具。它供生产线上从事持续性、重复性工作时使用,用于悬挂,集中,搬运及移开工具。它带保险装置,可避免悬挂对象坠落并且可以手动锁止被悬挂物的装置。
[0038]
其优点是:
[0039]
(1).弹簧平衡器无电气或气动危险,使用安全可靠。
[0040]
(2).弹簧平衡器节省空间,降低生产成本。
[0041]
(3).加粗钢丝绳,伸出钢丝绳的长短由线缆、水、气管等负载重量决定。在不同时间,不同姿态,负载不一,伸出的钢丝绳长短就不一,它能自动伸出或回抽。
[0042]
(4).合金钢吊钩。确保强度足够,对所吊之物,由足够的安全保障。
[0043]
使用时,将焊接街机器人所要使用的线缆、水气管采用扎带捆扎在一起,然后将竖直调节件和水平调节件的长度调节到合适尺寸,之后利用弹簧平衡器将捆扎好的线缆、水气管吊起,避免了机器人工作时运动受限的问题,同时避免了线缆、水气管的可能会被损坏的问题。
[0044]
本实施例中,竖直调节件4和水平调节件5采用以下两种结构形式:
[0045]
第一种结构形式:伸缩杆式
[0046]
如图3所示,竖直调节件4包括第一竖直管41、第二竖直管42以及第一锁紧螺钉43;第一竖直管41同轴套设在第二竖直管42的外部;第一锁紧螺钉43沿水平方向穿过第一竖直管41侧壁后与所述第二竖直管42侧壁接触。水平调节件5包括第一水平管51、第二水平管52以及第二锁紧螺钉53;第一水平管51同轴套设在第二水平管52的外部,且第一水平管51的一端与第二竖直管42固连;第二锁紧螺钉53设置在第一水平管51远离第二竖直管42的一端,且第二锁紧螺钉53沿水平方向穿过第一水平管51侧壁后与所述第二水平管52侧壁接触;第二水平管52上安装弹簧平衡器6。使用时,松开第一锁紧螺钉,第二竖直管带着水平调节件、弹簧平衡器可沿第一竖直管在竖直方向滑动,当竖直位置确定后拧紧第一锁紧螺钉。之后松开第二锁紧螺钉,第二水平管带着弹簧平衡器可沿第一水平管在水平方向滑动,当水平位置确定后拧紧第二锁紧螺钉。最后,将将捆扎好的线缆、水气管悬挂于弹簧平衡器上。
[0047]
第二种结构形式:支撑板+调节孔
[0048]
如图4所示,竖直调节件4包括竖直支撑板44,竖直支撑板44上沿竖直方向开设有多个安装孔45(这里的多个安装孔可采用竖直腰形孔进行替代);水平调节件5包括水平支撑板54,水平支撑板54上沿水平方向开设有水平腰形孔55;水平支撑板54一端通过螺钉螺母的连接方式安装于所述安装孔45上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1