光伏电池片串焊机的焊线折弯切断定位机构的制作方法
1.本实用新型涉及电池片焊接领域,特别涉及光伏电池片串焊机的焊线折弯切断定位机构。
背景技术:
2.传统的多栅太阳能电池片的栅线通常在2-6栅之间,即每个电池片的单面并排采用2-6根定长焊线,然而随着技术升级及政策引导,对电池片光转换效率的要求也越来越高,在这种背景下,密栅电池片的发展也成为了未来的一种发展方向;
3.目前在对焊线送料过程中,由于焊线开始为成卷设置,因此将焊线拉出送料过程中,焊线会有一定的弯曲度,从而会对后续光伏电池片的焊接造成影响,同时,目前的光伏电池片串焊机没有定位机构,使得焊线在光伏电池片上会出现焊接不准的情况。
技术实现要素:
4.本实用新型解决的技术问题是提供一种光伏电池片串焊机的焊线折弯切断定位机构,可实现对焊线的拉伸、折弯和切断,保证焊线的平直度,可解决焊线在光伏电池片上焊接不准的情况。
5.本实用新型解决其技术问题所采用的技术方案是:光伏电池片串焊机的焊线折弯切断定位机构,包括底板,所述底板上设置有滑轨,所述滑轨上依次设置有前压机构、后压折弯机构和切线机构,还包括驱动前压机构沿滑轨做水平运动的第四气缸,所述切线机构远离后压折弯机构一侧还设置有焊线定位机构。
6.进一步的是:所述前压机构包括前压机架,所述前压机架上设置有第一下板,所述第一下板上方设置有第一上板和驱动第一上板做升降运动的第三气缸,所述第一上板下放设置有多个第一下压柱,所述多个第一下压柱上分别套设有弹簧和第一压块,所述弹簧位于第一上板和第一压块之间,所述弹簧一端与第一上板连接,所述弹簧另一端与第一压块连接。
7.进一步的是:所述第一下板上设置有多个与第一压块一一对应的导向机构218,所述导向机构包括左导向柱和右导向柱,所述左导向柱和右导向柱之间设置有供焊线穿过的缝隙。
8.进一步的是:所述后压折弯机构包括后压机架,所述后压机架上设置有第二下板,所述第二下板上方设置有第二上板和驱动第二上板做升降运动的第五气缸,所述第二上板下放设置有多个第二下压柱,所述多个第一下压柱下方设置有第二压块,所述后压机架远离前压机架一侧设置有折弯机架,所述折弯机架内设置有上折弯块和下折弯块,还包括用于驱动上折弯块向下折弯块方向运动的第六气缸。
9.进一步的是:所述切线机构包括切线架,所述切线架上设置有第三下板,所述第三下板上设置有压线块,所述压线块底部设置有凹槽,使得焊线能从凹槽内穿过,所述第三下板远离折弯机架一侧设置有上切刀和下切刀,所述上切刀上方设置有驱动上切刀向下运动
的第七气缸,所述下切刀下方设置有驱动下切刀向上运动的第八气缸,所述切线架底部设置有用于驱动切线架沿滑轨运动的第九气缸。
10.进一步的是:所述焊线定位机构包括固定线板,所述固定线板内设置有供导线通过的多个第一导向槽,所述第一导向槽前端一侧设置有缺口,所述缺口内设置有单爪,所述固定线板底部设置有用于驱动单爪向第一导向槽前端另一侧的侧壁运动的第一驱动机构,所述固定线板下方还设置有驱动固定线板做升降运动的第二驱动机构。
11.进一步的是:所述第一驱动机构包括单爪底部连接的下联动板,所述固定线板底部设置有滑轨,所述下联动板通过滑块设置在滑轨上,还包括用于驱动下联动板沿滑轨滑动的第一气缸。
12.进一步的是:所述第二驱动机构包括设置于固定线板底部的支架,所述支架下方设置有驱动支架做升降运动的第二气缸。
13.本实用新型的有益效果是:本结构可实现将焊线拉直后再折弯、切断,保证了焊线的水平度,且切线机构在将焊线切断后会将焊线向前输送一端距离,从而防止焊线黏连在切刀上,保证后续步骤的稳定运行,同时定位机构的设置可实现对多条焊线的同时规正,保证焊线运动至光伏电池片位置处的精确性。
附图说明
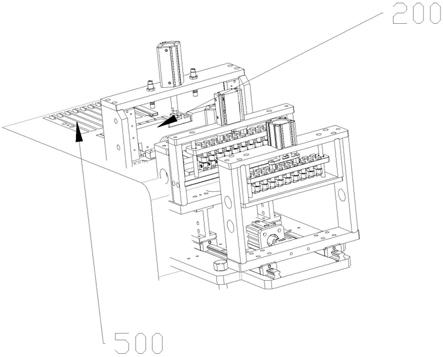
14.图1为光伏电池片串焊机的焊线折弯切断定位机构示意图。
15.图2为压线切刀机构示意图。
16.图3为前压机构示意图。
17.图4为后压折弯机构示意图。
18.图5为后压折弯机构侧视图。
19.图6为切线机构示意图。
20.图7为切线机构侧视图。
21.图8为焊线定位机构示意图。
22.图9为焊线定位机构内部结构示意图。
23.图中标记为:前压机构210、前压机架211、第一下板212、第一上板213、第三气缸214、第一下压柱215、弹簧216、第一压块217、导向机构218、第四气缸219、后压折弯机构220、第二下板221、第二上板222、第五气缸223、第二下压柱224、第二压块225、折弯机架226、上折弯块227、下折弯块228、第六气缸229、切线机构230、切线架231、第三下板232、压线块233、上切刀234、下切刀235、第七气缸236、第八气缸237、第九气缸238;
24.焊线定位机构500、固定线板501、第一导向槽502、单爪503、下联动板504、第一气缸505、支架506、第二气缸507。
具体实施方式
25.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
26.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
27.如图1和图2所示的光伏电池片串焊机的焊线折弯切断定位机构,包括底板,所述底板上设置有滑轨,所述滑轨上依次设置有前压机构210、后压折弯机构220和切线机构230,还包括驱动前压机构210沿滑轨做水平运动的第四气缸219,所述切线机构远离后压折弯机构一侧还设置有焊线定位机构,具体工作时,当焊线运动到位后,前压机构210、后压折弯机构220下压固定焊线,接着第四气缸219驱动前压机构210向远离后压折弯机构220的方向运动,实现对焊带的整压拉伸和和特定部位的折弯操作,接着外部拉丝机构将焊线放置到焊线定位机构出实现焊线定位,此种设置可保证焊线从原先的卷曲状态改变为平整状态,从而保证焊线后续的使用,焊线定位机构的设置可保证将焊线放置到光伏电池的正确位置处,从而保证焊接的准确性。
28.具体的,如图3所示,所述前压机构210包括前压机架211,所述前压机架211上设置有第一下板212,所述第一下板212上方设置有第一上板213和驱动第一上板213做升降运动的第三气缸214,所述第一上板213下放设置有多个第一下压柱215,所述多个第一下压柱215上分别套设有弹簧216和第一压块217,所述弹簧216位于第一上板213和第一压块217之间,所述弹簧216一端与第一上板213第一上板213连接,所述弹簧216另一端与第一压块217连接;
29.如图4和图5所示,所述后压折弯机构220包括后压机架,所述后压机架上设置有第二下板221,所述第二下板221上方设置有第二上板222和驱动第二上板222做升降运动的第五气缸223,所述第二上板222下放设置有多个第二下压柱224,所述多个第一下压柱215下方设置有第二压块225,所述后压机架远离前压机架211一侧设置有折弯机架226,所述折弯机架226内设置有上折弯块227和下折弯块228,还包括用于驱动上折弯块227向下折弯块228方向运动的第六气缸229;
30.工作时,当焊线运动到位后,第三气缸214驱动第一上板213下压,使得第一压块217压在对应的焊线上,第五气缸223驱动第二上板222下压,使得第二压块225压在对应的焊线上,第六气缸229驱动上折弯块227下压与下折弯块228配合对焊线折弯成型,接着第四气缸219驱动前压机架211向远离后压机架的方向运动,实现对焊带的整压拉伸和和特定部位的折弯操作,从而保证焊线从原先的卷曲状态改变为平整状态,从而保证焊线后续的使用。
31.在上述基础上,所述第一下板212上设置有多个与第一压块217一一对应的导向机构218,所述导向机构218包括左导向柱和右导向柱,所述左导向柱和右导向柱之间设置有供焊线穿过的缝隙,导向机构218的设置,使得焊线在运动过程中从左导向柱和右导向柱之间穿过,从而保证焊线运动路径的准确性,也可避免出现两根焊线缠绕在一起的情况。
32.在上述基础上,如图6和图7所示,所述切线机构230包括切线架231,所述切线架231上设置有第三下板232,所述第三下板232上设置有压线块233,所述压线块233底部设置有凹槽304,使得焊线能从凹槽304内穿过,所述第三下板232远离折弯机架226一侧设置有上切刀234和下切刀235,所述上切刀234上方设置有驱动上切刀234向下运动的第七气缸
236,所述下切刀235下方设置有驱动下切刀235向上运动的第八气缸237,所述切线架231底部设置有用于驱动切线架231沿滑轨运动的第九气缸238,具体工作时,当需要切断时,第七气缸236驱动上切刀234,第八气缸237驱动下切刀235,使得上切刀234和下切刀235相向运动,将焊线切断,当焊线切断后,第九气缸238驱动切线架231沿滑轨向前运动,将焊线向前送出一段,此种设置可防止焊线黏连在切刀上,从而对后续造成影响。
33.在上述基础上,如图8和图9所示的焊线定位机构包括固定线板501,所述固定线板501内设置有供导线通过的多个第一导向槽502,所述第一导向槽502前端一侧设置有缺口,所述缺口内设置有单爪503,所述固定线板501底部设置有用于驱动单爪503向第一导向槽502前端另一侧的侧壁运动的第一驱动机构,所述固定线板501下方还设置有驱动固定线板501做升降运动的第二驱动机构,具体工作时,外部拉丝机构将焊线放置到固定线板501内设置的多个第一导向槽502内,此时固定线板501的高度与外部前端的压线切刀机构中的焊线中的切线台高度相同,第一驱动机构驱动下驱动单爪503向第一导向槽502前端另一侧的侧壁运动,使得焊线规正至单爪503与第一导向槽502前端的侧壁之间,接着第二驱动机构固定线板501上升至于后部的皮带传输线同一水平面,拉丝机构将规正到位的焊线放置到光伏电池片上,本机构的设置可保证将焊线放置到光伏电池的正确位置处,从而保证焊接的准确性。
34.具体的,如图9所示,所述第一驱动机构包括单爪503底部连接的下联动板504,所述固定线板501底部设置有滑轨,所述下联动板504通过滑块设置在滑轨上,还包括用于驱动下联动板504沿滑轨滑动的第一气缸505,具体进行夹爪操作时,第一气缸505驱动下联动板504沿滑轨运动,使得下联动板504带动单爪503驱动焊线向第一导向槽502前端的侧壁运动,使得焊线规正至单爪503与第一导向槽502前端的侧壁之间。
35.具体的,所述第二驱动机构包括设置于固定线板501底部的支架506,所述支架506下方设置有驱动支架506做升降运动的第二气缸507,具体进行升降操作时,由第二气缸507驱动支架的升降,从而实现固定线板501的升降。
36.以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1