一种节点球自动焊接系统及方法与流程
1.本发明涉及节点球焊接加工技术领域,具体地说,是涉及一种节点球自动焊接系统及方法。
背景技术:
2.网架结构具有空间受力无需支撑、重量轻、刚度大、抗震性能好、造型美观等优点,广泛应用于体育馆、影剧院、展览厅、候车厅、体育场看台雨篷、飞机库、双向大柱网架结构距车间等建筑的屋盖。采用焊接节点球进行连接是网架结构常见的连接形式,因此节点球的加工质量对网架结构的质量和安全影响极大。
3.节点球是由两个半球焊接而成,在焊接过程中,需要进行对准操作,然后再进行焊接,目前的焊接一般由手动对接完成,从而使得焊接过程中至少需要两个人才能完成,且该焊接方式受人为因素影响较大,对技工的焊接技能要求较高,焊接质量的控制难度大,且焊接效率偏低。
4.现有技术中有出现部分用于节点球焊接的焊接平台或者装置,这些焊接平台或者装置虽然解决了节点球的夹持问题,但是这些平台普遍自动化程度较低,仍旧需要较多的人工干预,不利于提高生产效率及产品质量。
5.例如公告号为cn112247455a的中国专利,公开了一种利用导向板实现焊接球快速定位的焊接平台及其控制方法,该焊接平台在安装两个半球时操作复杂,对操作工人的要求较高;又如公告号为cn211028716u的中国专利,公开了焊接球焊接对接设备,该设备通过真空泵将两个半球吸附,然后通过旋转机构使得半球旋转从而完成焊接,这种方式不能保证焊缝的平整性,均匀性,焊接质量不高。
技术实现要素:
6.为了解决上述技术问题,本发明的第一个目的在于提供一种节点球自动焊接系统,该系统自动化程度高,且操作方便,焊接质量好;本发明的第二个目的在于提供一种节点球自动焊接方法。
7.为了实现上述第一个发明的目的,本发明采用以下技术方案:
8.一种节点球自动焊接系统,包括机座、升降机构、横移机构、夹紧机构、焊接机械手、控制装置以及用来夹紧节点球的夹具,所述夹具包括多个弧形连接体,多个弧形连接体相互铰接,且首尾两个弧形连接体之间还设有锁紧结构,所述升降机构固定在机座上,所述横移机构设置在升降机构的顶部,所述横移机构上还设有放置节点球及夹具的定位结构,所述夹紧机构包括分别滑动设置在机座上的从动顶轮组件和主动顶轮组件,且两者分别位于升降机构的两侧,所述主动顶轮组件包括主动顶轮机架、主动轴、旋转电机和第一驱动机构,所述主动轴转动设置在主动顶轮机架上部,且由旋转电机带动,所述主动顶轮机架滑动设置在机座上,且通过第一驱动机构带动;所述从动顶轮组件包括第二驱动机构、从动顶轮机架以及转动设置在从动顶轮机架上的从动轴,所述从动顶轮机架滑动设置在机座上,通
过第二驱动机构带动,且第二驱动机构上还设有扭矩限制器;主动轴与从动轴将节点球夹紧后并带其转动,焊接机械手在控制装置的控制下对节点球进行焊接。
9.作为优选方案:所述锁紧结构包括锁紧把手、锁紧凸轮和锁紧插销,所述锁紧把手固定在锁紧凸轮上且向外凸出,所述锁紧凸轮转动设置在一个弧形连接体上,所述锁紧插销固定在另一个弧形连接体上,锁紧凸轮靠近锁紧插销的一侧设有锯齿部,所述锁紧插销卡设在锯齿部内。
10.作为优选方案:所述第一驱动机构包括平移电机、减速机d和丝杆c,所述平移电机连接减速机d,所述减速机d固定在机座上,所述丝杆c通过丝杆座c设置在机座上,且一端通过联轴器与减速机d连接,所述丝杆c上还设有t型螺母c,且t型螺母c固定在主动顶轮机架底部,所述主动顶轮机架滑动设置在机座上,且通过平移电机驱动运动。
11.作为优选方案:所述第二驱动机构包括减速电机和丝杆b,所述减速电机固定在机座上,所述丝杆b通过丝杆座b设置在机座上,且一端与减速电机连接,所述扭矩限制器设置在减速电机与丝杆b之间,所述丝杆b上还设有t型螺母b,且t型螺母b固定在主动顶轮机架底部,所述主动顶轮机架滑动设置在机座上,且由减速电机驱动运动。
12.作为优选方案:所述升降机构包括升降驱动电机、减速机a和升降机,所述机座上还设有底板,所述底板位于从动顶轮组件和主动顶轮组件之间,所述升降驱动电机连接减速机a,且减速机a固定在底板上,两个升降机分别设置在底板的两端,且升降机的顶部固定有升降板,两个升降机之间通过同步轴连接,所述减速机a的输出轴与升降机连接,驱动升降板上下运动。
13.作为优选方案:所述升降板的底部的四个角部还固定有导向轴,所述底板的四个角部固定有导向轴承,通过导向轴与导向轴承的配合使得升降板上下滑动设置在底板上。
14.作为优选方案:所述减速机a通过减速机底座固定在底板上,所述减速机底座上还设有用来确定升降位置原点的原点光电传感器。
15.作为优选方案:所述横移机构包括横移板、横移电机、减速机b和丝杆a,所述横移板滑动设置在升降板的上部,所述横移板的上部还设有定位结构,所述横移电机连接减速机b,所述减速机b通过固定在升降板的一端,所述丝杆a的两端分别通过丝杆座a和丝杆固定座设置在升降板上,且丝杆a的一端还通过联轴器与减速机b连接,所述丝杆a上还设有t形螺母a,t形螺母a与横移板的底部固定,横移电机带动横移板运动。
16.作为优选方案:所述定位结构包括定位轴以及定位轴安装座,所述横移板沿横移导轨延伸方向的两侧分别设有凹槽,所述定位轴安装座固定在凹槽内,所述定位轴的两端通过轴承转动设置在定位轴安装座内。
17.为了实现上述第二个发明的目的,本发明采用以下技术方案:
18.一种节点球自动焊接方法,采用如上所述的焊接系统,步骤如下:
19.首先,待焊接的节点球包括初步定位焊接的第一节点半球和第二节点半球,将夹具安装在第一节点半球和第二节点半球的待焊接坡口位置;
20.然后,将安装了夹具的节点球放置在横移机构的定位结构上,控制装置控制横移机构将节点球移动至夹紧机构下方,且控制升降机构将节点球提升至夹紧机构同一高度,控制装置控制从动顶轮组件和主动顶轮组件相互靠近夹紧节点球,并且根据扭矩限制器的信号判断主动顶轮组件和从动顶轮组件是否将待焊接的节点球夹紧,当节点球被夹紧后拆
除夹具,控制装置控制主动顶轮组件带动节点球转动,同时控制焊接机械手对节点球进行焊接。
21.与现有技术相比,本发明的有益效果为:
22.本发明利用控制装置对升降机构、横移机构、夹紧机构的配合控制,使得放置在横移机构上的节点球能自动被夹紧机构夹紧,且由于采用了夹具对节点球进行初步定位,保证了运动过程中节点球上待焊接坡口位置的稳定,有利于提高焊接的质量,此时再拆下夹具,控制装置控制夹紧机构带动节点球转动,同时控制焊接机械手对节点球进行焊接,本发明的夹紧机构中还通过设置扭矩限制器,能更好控制节点球的的夹持力度,进一步提高焊接质量。
附图说明
23.构成本技术的一部分的说明书附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的限定。
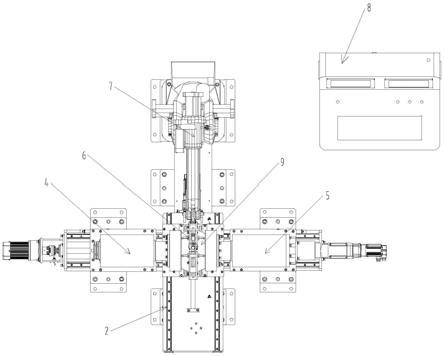
24.图1为本发明的整体俯视结构示意图;
25.图2为本发明的整体结构(除控制装置外)的示意图;
26.图3为本发明的机座以及升降机构的结构示意图;
27.图4为本发明的横移机构的结构示意图;
28.图5为本发明的机座以及升降机构的爆炸结构示意图;
29.图6为本发明的横移机构的爆炸结构示意图;
30.图7为本发明的夹紧机构的结构示意图;
31.图8为本发明的主动顶轮组件的结构示意图;
32.图9为本发明的从动顶轮组件的结构示意图;
33.图10为本发明的夹具与节点球的安装结构示意图;
34.图11为本发明的夹具打开时的结构示意图;
35.图12为本发明的夹具与节点球的剖面结构示意图。
具体实施方式
36.下面结合附图与实施例对本发明作进一步说明:
37.如图1和图2所示的一种节点球自动焊接系统,包括机座1、升降机构2、横移机构3、夹紧机构、焊接机械手7、控制装置8以及用来定位节点球9的夹具6,所述升降机构2固定在机座1上,所述横移机构3设置在升降机构2的顶部,所述横移机构3上还设有放置节点球9及夹具的定位结构,所述夹紧机构包括分别滑动设置在机座1上的从动顶轮组件4和主动顶轮组件5,且两者分别位于升降机构2的两侧,所述控制装置8与焊接机械手7、升降机构2、横移机构3、夹紧机构通过线缆连接,将安装了夹具6的节点球9放置在横移机构3的定位结构上,控制装置8控制横移机构3将节点球9移动至夹紧机构下方,且控制升降机构2将节点球9提升至夹紧机构同一高度,控制装置8控制从动顶轮组件4和主动顶轮组件5相互靠近夹紧节点球9,拆除夹具6后,控制装置8控制主动顶轮组件5带动节点球9转动,同时控制焊接机械手7对节点球9进行焊接。
38.如图3和图5所示,所述机座1上还设有底板20和导轨11,两段导轨11分别位于底板
20的两侧,且底板20与导轨11垂直,所述升降机构2包括升降驱动电机23、减速机a24和升降机28,所述升降驱动电机23连接减速机a24,且减速机a24通过减速机底座26固定在底板20上,两个升降机28分别设置在底板20的两端,且升降机28的顶部固定有升降板21,两个升降机28之间通过同步轴27连接,所述减速机a24的输出轴与升降机28连接,驱动两个升降机28同步运动,将升降板21升高或者降低。
39.为了进一步提高升降板21运动的稳定性,所述升降板21的底部的四个角部还固定有导向轴22,所述底板20的四个角部固定有导向轴承29,通过导向轴22与导向轴承29的配合使得升降板21上下滑动设置在底板20上。
40.所述减速机底座26上还设有原点光电传感器25,升降板21在上升前由原点光电确传感器确认升降位置原点,上升终点根据待焊接的节点球的实际直径由控制装置对升降驱动电机实时控制,上升到位时,待焊接的节点球与夹紧机构位于同一高度,升降时升降板21通过分布在四角的四根导向轴导向,避免升降过程中出现位置偏移。
41.如图4和图6所示,所述横移机构3包括横移板301、横移电机302、减速机b303和丝杆a308,所述升降板21的上部设有横移导轨311,所述横移板301通过横移滑块312与横移导轨311的配合滑动设置在升降板21上,所述横移板301的上部还设有定位结构,所述定位结构包括定位轴313以及定位轴安装座314,所述横移板301沿横移导轨311延伸方向的两侧分别设有凹槽,所述定位轴安装座314固定在凹槽内,所述定位轴313的两端通过轴承转动设置在定位轴安装座314内。所述节点球由两根定位轴313支撑,为了更好的承载节点球,所述定位轴313靠近定位轴安装座314内侧壁的两端还设有挡圈。
42.所述横移电机302连接减速机b303,所述减速机b303通过减速机安装座304固定在升降板21的一端,所述丝杆a308的两端分别通过丝杆座a306和丝杆固定座310设置在升降板21上,丝杆a308与丝杆座a306、丝杆固定座310之间均通过轴承安装,丝杆a308的一端还通过联轴器与减速机b303连接,所述丝杆a308上还设有t形螺母a307,t形螺母a307与横移板301的底部固定,横移电机302带动丝杆a308转动,从而使得t形螺母a307在丝杆a308的位置发生变化,实现了驱动横移底板运动的目的。
43.所述升降板21上还设有前到位光电传感器和后到位光电传感器。横移电机通过丝杆a308驱动横移板在横移导轨311上进行横向移动,完成待焊接的节点球的上下料。横移过程中通过前到位光电传感器和后到位光电传感器限制横移行程,避免横移板脱位。
44.如图7和图8所示,所述主动顶轮组件5包括主动顶轮机架501、主动轴503、减速机c505、旋转电机504、平移电机507、减速机d508和丝杆c512,所述主动顶轮机架501底部设有平移导轨滑块b514,通过底板一侧的导轨与平移导轨滑块b514的配合使得主动顶轮机架501滑动设置在机座1上,所述平移电机507连接减速机d508,所述减速机d通过减速机座509固定在机座1上,所述丝杆c512通过丝杆座c511设置在机座1上,且一端通过联轴器与减速机d508连接,所述丝杆c512上还设有t型螺母c513,且t型螺母c513固定在主动顶轮机架501底部,平移电机507带动丝杆转动,使得丝杆上的t型螺母c513的位置发生改变,进而使得主动顶轮机架501靠近焊接球或者远离焊接球。
45.所述旋转电机504连接减速机c505,所述减速机c505通过减速机安装板506固定在主动顶轮机架501上部,所述主动轴503通过轴承转动设置在主动顶轮架501的上部,且主动轴503的一端固定有主动摩擦盘502,另一端与减速机c505连接,旋转电机504带动主动轴转
动,所述主动顶轮机架501上还设有用来满足不同焊接角度的旋转原点开关,通过旋转前对旋转原点开关的校准,可实现节点球不同角度位置的焊接。
46.如图7和图9所示,所述从动顶轮组件4包括从动顶轮机架401、从动轴402、减速电机404和丝杆b409,所述从动顶轮机架401底部设有平移导轨滑块a412,通过底板另一侧的导轨与平移导轨滑块a412的配合使得从动顶轮机架401滑动设置在机座1上,所述从动轴402通过轴承转动设置在从动顶轮机架401的上部,且从动轴402的一端固定有从动摩擦盘403,所述减速电机404通过电机座408固定在机座1上,所述电机座408的两端分别嵌设有轴承板406和丝杆座b407,所述丝杆b409的两端分别通过轴承设置在轴承板406和丝杆座b407上,且丝杆b409的一端与减速电机404连接,所述减速电机404与丝杆b409之间还设有扭矩限制器405,所述电机座408上还设有限制器开关,所述丝杆b409上还设有t型螺母b410,且所述t型螺母b410通过螺母底座411固定在主动顶轮机架501底部,减速电机404带动丝杆b409转动,从而使得丝杆b409上的t型螺母b410改变位置,进而使得从动顶轮机架401靠近焊接球或者远离焊接球。
47.本发明的工作过程如下,
48.首先,待焊接的节点球包括初步定位焊接的第一节点半球和第二节点半球,将夹具安装在第一节点半球91和第二节点半球92的待焊接坡口位置;夹具6的具体结构如图10至图12所示,所述夹具6包括多个弧形连接体61,多个弧形连接体61相互铰接,且首尾两个弧形连接体61之间还设有锁紧结构,所述锁紧结构包括锁紧把手63、锁紧凸轮64和锁紧插销65,所述锁紧把手63固定在锁紧凸轮64上且向外凸出,所述锁紧凸轮64转动设置在一个弧形连接体61上,所述锁紧插销65固定在另一个弧形连接体61上,锁紧凸轮64靠近锁紧插销65的一侧设有锯齿部,所述锁紧插销65包括壳体和贯穿设置在壳体中的锁定轴,锁定轴与壳体之间还设有弹簧,在弹簧作用下,锁定轴始终插向锁紧凸轮64,所述弧形连接体61成框架结构,且中部通过轴设有多个定位轮62,所述定位轮62凸出于弧形连接体61的内侧。
49.然后,将安装了夹具6的节点球9放置在横移机构3的定位结构处,控制装置8通过控制横移电机302和升降驱动电机23使得升降板21和横移板301到达夹紧机构处,控制装置8通过控制平移电机、减速电机使得主动顶轮组件和从动顶轮组件相互靠近,并且根据扭矩限制器的信号,判断主动顶轮组件和从动顶轮组件是否将待焊接节点球夹紧,当主动摩擦盘和从动摩擦盘夹紧第一节点半球91和第二节点半球92后,拆除夹具。
50.最后,控制装置通过控制旋转电机,带动主动轴转动,在主动摩擦盘与节点球之间的摩擦力作用,旋转电机可通过主动轴带动节点球旋转,另外由于从动摩擦盘与节点球之间的摩擦力作用,从动摩擦盘可跟随节点球转动,焊接机械手7在控制装置8的控制下对节点球完成各角度的焊接作业。
51.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
52.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨
的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1