基于云平台的自动焊接机器人的焊接工艺管控系统的制作方法
1.本发明涉及自动焊接机器人领域,具体涉及基于云平台的自动焊接机器人的焊接工艺管控系统。
背景技术:
2.随着社会科技的不断发展和工艺技术的进步,自动焊接机器人已经广泛用于各个工业制造领域。目前没有统一的焊接工艺平台对自动焊接机器人焊接工艺进行管理,且不同厂家的焊接机器人焊接工艺不一致,导致焊接质量差异化以及不稳定,所以需要对焊接过程数据进行监控;又加上新的复合制造材料不断被应用以及新的工艺的出现,需要对焊接工艺不断地及时更新、优化和升级,加上云中的资源是可以无限扩展,并且可以获得,按需使用,随时扩展,按照客户的需要收费。因此,开发一种基于云平台的自动焊接机器人的焊接工艺管控系统具有非常重要的意义。
技术实现要素:
3.本发明所要解决的技术问题是:如何通过建立统一的焊接工艺数据库对自动焊接机器人的焊接工艺进行统一管理,远程监控焊接过程数据以及对焊接工艺及时有效地升级管理,提高焊接效率和焊接质量,本发明提供了解决上述问题的一种基于云平台的自动焊接机器人的焊接工艺管控系统。
4.本发明通过下述技术方案实现:
5.基于云平台的自动焊接机器人的焊接工艺管控系统,该系统包括:数据收发模块、设计图纸存储模块、焊接工艺数据库模块、中央处理模块、三维动画模拟模块;
6.所述数据收发模块用于接收焊接件数据,并将焊接件数据发送给中央处理模块;
7.所述中央处理模块提取设计图纸存储模块存储的对应图纸数据,将接收到的焊接件数据与提取的对应图纸数据进行比较,判断焊接件数据与提取的对应图纸数据之间的误差是否超过阈值;
8.所述中央处理模块分别与数据收发模块、三维动画模拟模块和焊接工艺数据库模块通信连接。
9.具体的,所述焊接件数据包括:焊接件三维数据、焊接位置数据、母材材料数据、板厚信息数据、接头形式数据和坡口信息数据。
10.具体的,所述焊接数据包括:焊条直径、焊接电流、电弧电压、焊接速度和预热温度。
11.优选的,当所述中央处理模块判断焊接件数据与提取的对应图纸数据之间的误差不超过阈值时,所述中央处理模块从焊接工艺数据库模块获取焊接数据,并将该焊接数据发送给数据收发模块和三维动画模拟模块,三维动画模拟模块基于接收的焊接数据对焊接过程进行预模拟;所述数据收发模块接收焊接过程数据,并将焊接过程数据发送给中央处理模块,中央处理模块将焊接过程数据发送给三维动画模拟模块,三维动画模拟模块基于
接收的焊接过程数据对机器人焊接动作进行同步模拟。
12.优选的,所述焊接工艺管控系统还包括通讯模块和人机界面模块,当所述中央处理模块判断焊接件数据与提取的对应图纸数据之间的误差不超过阈值时,所述中央处理模块通过通讯模块将焊接各个过程的状态数据以及动画模拟显示在人机界面模块,同时人机界面模块也能实现人工手动操作。
13.优选的,所述焊接工艺管控系统还包括通讯模块和声光报警模块,当所述中央处理模块判断焊接件数据与提取的对应图纸数据之间的误差超过阈值时,所述中央处理模块通过通讯模块驱动声光报警模块进行报警。
14.优选的,所述焊接工艺管控系统还包括通讯模块、人机界面模块和声光报警模块,当所述中央处理模块判断焊接件数据与提取的对应图纸数据之间的误差不超过阈值时,所述中央处理模块通过通讯模块将焊接各个过程的状态数据以及动画模拟显示在人机界面模块,同时人机界面模块也能实现人工手动操作;当所述中央处理模块判断焊接件数据与提取的对应图纸数据之间的误差超过阈值时,所述中央处理模块通过通讯模块驱动声光报警模块进行报警。
15.具体的,所述焊接件数据通过机器人智能识别系统识别焊接件获得。
16.具体的,所述焊接过程数据通过机器人自动焊接系统在进行自动焊接时获得。
17.优选的,所述焊接工艺管控系统与远程工作站系统通信连接,所述远程工作站系统用于监看机器人焊接过程的实时数据,并对焊接工艺数据库进行更新、优化和升级。
18.本发明的系统工作原理:
19.机器人智能识别系统识别焊接件,得到焊接件数据,并将该焊接件数据发送给数据收发模块;数据收发模块将该焊接件数据发送给中央处理模块;中央处理模块提取设计图纸存储模块存储的对应图纸数据,中央处理模块将所接收的焊接件数据与提取的对应图纸数据进行对比,判断误差是否超过阈值,如果超过,声光报警模块进行报警,否则,中央处理模块访问焊接工艺数据库模块,获取焊接数据,并将该焊接数据发送给数据收发模块和三维动画模拟模块,三维动画模拟模块基于接收的焊接数据,对焊接过程进行预模拟;数据收发模块将该焊接数据发送给机器人自动焊接系统;机器人自动焊接系统接收焊接数据,并进行焊接,同时将焊接过程数据发送给数据收发模块;数据收发模块将焊接过程数据发送给中央处理模块,中央处理模块接收焊接过程数据,并将该焊接过程数据发送给三维动画模拟模块;三维动画模拟模块基于接收的焊接过程数据,对机器人焊接动作进行同步模拟。
20.本发明具有如下的优点和有益效果:
21.本发明基于云平台的自动焊接机器人的焊接工艺管控系统作为一个焊接工艺管理平台,将焊接工艺数据变成计算机语言、三维动画演练、故障报警提示、数据远程监测、数据库远程升级,所有的设备都集成模块化、平台化,具有通用性和高效适用性。
附图说明
22.此处所说明的附图用来提供对本发明实施例的进一步理解,构成本申请的一部分,并不构成对本发明实施例的限定。在附图中:
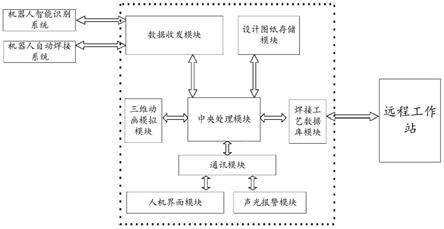
23.图1为本发明的系统框图。
24.图2为本发明的系统工作原理。
具体实施方式
25.为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
26.实施例
27.如图1所述,基于云平台的自动焊接机器人的焊接工艺管控系统,该系统包括:数据收发模块、设计图纸存储模块、焊接工艺数据库模块、中央处理模块、三维动画模拟模块、通讯模块、人机界面模块和声光报警模块。
28.数据收发模块用于接收焊接件数据,并将焊接件数据发送给中央处理模块;
29.中央处理模块提取设计图纸存储模块存储的对应图纸数据,将接收到的焊接件数据与提取的对应图纸数据进行比较,判断焊接件数据与提取的对应图纸数据之间的误差是否超过阈值;中央处理模块分别与数据收发模块、三维动画模拟模块和焊接工艺数据库模块通信连接。
30.本实施例的焊接工艺管控系统还与远程工作站系统通信连接,该远程工作站系统用于监看机器人焊接过程的实时数据,并对焊接工艺数据库进行更新、优化和升级。
31.焊接件数据包括:焊接件三维数据、焊接位置数据、母材材料数据、板厚信息数据、接头形式数据和坡口信息数据。
32.焊接数据包括:焊条直径、焊接电流、电弧电压、焊接速度和预热温度。
33.本实施例的系统工作原理具体如图2所示:
34.机器人智能识别系统识别焊接件,得到焊接件数据,并将该焊接件数据发送给数据收发模块;数据收发模块将该焊接件数据发送给中央处理模块;中央处理模块提取设计图纸存储模块存储的对应图纸数据,中央处理模块将所接收的焊接件数据与提取的对应图纸数据进行对比,判断误差是否超过阈值,如果超过,声光报警模块进行报警,否则,中央处理模块访问焊接工艺数据库模块,获取焊接数据,并将该焊接数据发送给数据收发模块和三维动画模拟模块,三维动画模拟模块基于接收的焊接数据,对焊接过程进行预模拟;数据收发模块将该焊接数据发送给机器人自动焊接系统;机器人自动焊接系统接收焊接数据,并进行焊接,同时将焊接过程数据发送给数据收发模块;数据收发模块将焊接过程数据发送给中央处理模块,中央处理模块接收焊接过程数据,并将该焊接过程数据发送给三维动画模拟模块;三维动画模拟模块基于接收的焊接过程数据,对机器人焊接动作进行同步模拟。
35.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1