非标构件智能管控平台的制作方法
1.本发明涉及自动焊接控制与工艺的技术领域,具体是一种非标构件智能管控平台。
背景技术:
2.当前我国钢结构行业主要由人工焊接和机器人焊接两种方式。机器人焊接能够很大程度上提高焊接工作效率,降低人的劳动强度,改善工作环境,提高焊接工艺和质量,但是同样存在着焊接准备工作效率低下的缺陷。当前纵观国内机器人焊接领域,机器人焊接多数已在线示教、在线编程较多,部分机器人引入视觉技术可以做到免编程效果。但在实际工作中,任然需要对每个焊缝进行拍照等工作,浪费了大量的人力物力,工作效率仍需提高。
技术实现要素:
3.本发明提出了一种非标构件智能管控平台,包括操作平台,所述操作平台执行以下步骤:(1)、获取外界输入的工件的结构数据;(2)、从所述数据结构中解析出焊接点位的空间位置信息;(3)、基于所述空间位置信息和所述结构数据,在外界输入的选择下为各焊接点位匹配相适应的焊接工艺信息;(4)、将所述空间位置信息和所述焊接工艺信息捆绑并转化为焊接机器人可读的焊接信息;(5)将焊接信息发送至焊接机器人。
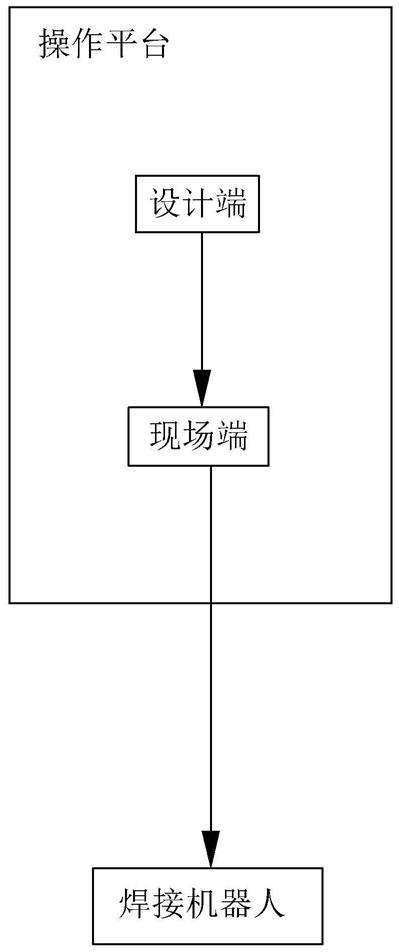
4.上述非标构件自动化管控平台的进一步设置为:所述操作平台包括设计端和车间端,所述设计端执行所述步骤(1)至所述步骤(4)。所述设计端与所述车间端建立数据连接,所述车间端与所述焊接机器人建立数据连接,所述步骤(5)的具体过程是:所述车间端将所述焊接信息发送至所述焊接机器人。
5.本发明的有益技术效果为:1、本系统在运行过程中,可以将机器人编程的工作在设计阶段完成,并且由软件完成,这样不再需要工人在车间编程工作。而且在这样的操作设计端可以快速准确的获知到各个焊接点位及其位置,并且能过根据不同的焊缝形式匹配相应的焊接工艺,在操作过程中也是十分便捷的。大大提高了车间机器人编程的工作效率。
6.2、在这样的设计下,设计端位于设计室内,车间端位于焊接现场,将设计工作和车间作业分开来,当设计端焊接任务发布后,车间工人在车间接收焊接数据即可,然后可以根据设计端所发布的工期内完成对应的焊接任务,使得将车间复杂的机器人在线编程、示教工作,调整到设计端,同时引入了工程的概念,使得对焊接任务以工程、任务的形式进行,多工程、多任务、多机器人协同工作,大大挺高了焊接工作效率。为实现无人化工程做到了十
分重要的铺垫。
附图说明
7.图1是本发明中非标构件智能管控平台的构造示意图。
具体实施方式
8.下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非旨在限制本发明的保护范围。
9.本发明公开了一种非标构件智能管控平台,本发明包括操作平台,操作平台执行以下步骤:(1)、获取外界输入的工件的结构数据;(2)、从数据结构中解析出焊接点位的空间位置信息;(3)、基于空间位置信息和结构数据,在外界输入的选择下为各焊接点位匹配相适应的焊接工艺信息;(4)、将空间位置信息和焊接工艺信息捆绑并转化为焊接机器人可读的焊接信息;(5)将焊接信息发送至焊接机器人。
10.关于步骤(1),本系统是需要从外界输入具体的工件的结构数据的,具体的行为是导入表格。表格中至少包括焊缝坐标、焊缝长度、电流、电压等数据。表格内的数据可以采用钢结构领域内通用的3d模型软件导出。
11.关于步骤(2),此步骤的目的是获得需要进行焊接操作的各个焊接点位以及各焊接点位的相对位置关系,所以空间位置信息包含了各个焊接点位在三维空间内的相对位置关系。
12.关于步骤(3),此步骤的目的是在获知了焊接点位后,将具体的焊接点位选择相适配的焊接工艺,进而将焊接工艺信息与空间位置信息绑定。
13.本系统在运行过程中,可以将编程的工作在设计阶段完成,并且由软件完成,这样不再需要工人在现场录入程序。而且在这样的操作平台中,可以快速准确的获知到各个焊接点位及其位置,在操作过程中也是十分便捷的。
14.操作平台包括设计端和车间端,设计端执行步骤(1)至步骤(4)。设计端与车间端建立数据连接,车间端与焊接机器人建立数据连接,步骤(5)的具体过程是车间端将焊接信息发送至焊接机器人,焊接机器人可直接进行工作,无需编程、无需示教。
15.在这样的设计下,设计端位于设计室内,车间端位于焊接现场,将设计工作和车间作业分开来,当设计端焊接任务发布后,车间工人在车间接收焊接数据即可,然后可以根据设计端所发布的工期内完成对应的焊接任务,使得将车间复杂的机器人在线编程、示教工作,调整到设计端,同时引入了工程的概念,使得对焊接任务以工程、任务的形式进行,多工程、多任务、多机器人协同工作,大大挺高了焊接工作效率。为实现无人化工程做到了十分重要的铺垫。
16.在现场具体作业时,将工件固定,将焊枪触到工件上的一个点并将该点作为基准点,较佳的是采用工件某一端部的边角位置。此时焊枪在焊接设备的坐标系中的位置是确定的,又由于知道了各焊缝相对于基准点的位置,所以焊接设备便可以自动控制操作。
17.虽然已经参考优选实施例对本发明进行了描述,但在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件,尤其是,只要不存在结构冲突,各个实施例中所提到的各项技术特征均可以任意方式组合起来。本发明并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。
18.在本发明的描述中,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
19.此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
20.术语“包括”或者任何其它类似用语旨在涵盖非排他性的包含,从而使得包括一系列要素的过程、物品或者设备/装置不仅包括那些要素,而且还包括没有明确列出的其它要素,或者还包括这些过程、物品或者设备/装置所固有的要素。
21.至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征作出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
技术特征:
1.一种非标构件智能管控平台,其特征在于:包括操作平台,所述操作平台执行以下步骤:(1)、获取外界输入的工件的结构数据;(2)、从所述数据结构中解析出焊接点位的空间位置信息;(3)、基于所述空间位置信息和所述结构数据,在外界输入的选择下为各焊接点位匹配相适应的焊接工艺信息;(4)、将所述空间位置信息和所述焊接工艺信息捆绑并转化为焊接机器人可读的焊接信息;(5)将焊接信息发送至焊接机器人。2.根据权利要求1所述的非标构件智能管控平台,其特征在于:所述操作平台包括设计端和车间端,所述设计端执行所述步骤(1)至所述步骤(4);所述设计端与所述车间端建立数据连接,所述车间端与所述焊接机器人建立数据连接,所述步骤(5)的具体过程是:所述车间端将所述焊接信息发送至所述焊接机器人。
技术总结
本发明为非标构件智能管控平台,涉及自动焊接控制与工艺的技术领域,本发明包括操作平台,操作平台执行以下步骤:(1)、获取外界输入的工件的结构数据;(2)、从数据结构中解析出焊接点位的空间位置信息;(3)、基于空间位置信息和结构数据,在外界输入的选择下为各焊接点位匹配相适应的焊接工艺信息;(4)、将空间位置信息和焊接工艺信息捆绑并转化为焊接机器人可读的焊接信息;(5)将焊接信息发送至相应机器人。本平台可以将焊接前的准备工作在设计端完成,车间端将实际构件的焊接信息转化后发送给指定机器人,从而达到焊接机器人多工程、多任务、免编程、免示教、免仿真效果。使焊接机器人的焊接工作效率得到大大的提高。的焊接工作效率得到大大的提高。的焊接工作效率得到大大的提高。
技术研发人员:张昕 赵学龙 周云集 孙磊
受保护的技术使用者:辽宁都城机器人科技有限公司
技术研发日:2021.07.16
技术公布日:2021/9/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1