一种基于激光焊接的自我稳定夹持机构的制作方法
1.本发明涉及激光焊接领域,具体是涉及基于激光焊接的自我稳定夹持机构。
背景技术:
2.激光焊接是利用高能量密度的激光束作为热源的一种高效精密焊接方法。激光焊接是激光材料加工技术应用的重要方面之一。
3.现有激光焊接夹持机构在夹持圆柱材料进行对接时,通常为手动操作多个夹持机构进行夹持圆柱材料,导致两个圆柱材料焊接点对接不统一,便需要人工反复调整,操作繁琐,并加大了工作强度,以及部分激光焊接夹持机构是通过双电机驱动夹持机构进行旋转焊接圆柱材料,从而导致夹持机构旋转不同步,使圆柱材料焊接完成一端后产生撕裂断开,效率低,操作危险。
技术实现要素:
4.为解决上述技术问题,提供一种激光焊接的自我稳定夹持机构,本技术方案解决了上述背景技术中提出的现有激光焊接夹持机构在夹持圆柱材料进行对接时,通常为手动操作多个夹持机构进行夹持圆柱材料,导致两个圆柱材料焊接点对接不统一,便需要人工反复调整,操作繁琐,并加大了工作强度,以及部分激光焊接夹持机构是通过双电机驱动夹持机构进行旋转焊接圆柱材料,从而导致夹持机构旋转不同步,使圆柱材料焊接完成一端后产生撕裂断开,效率低,操作危险的问题。
5.为达到以上目的,本发明新型采用的技术方案为:一种基于激光焊接的自我稳定夹持机构,包括底座,所述底座右端设置有驱动结构,底座上端面设置有支撑对接结构,底座前后两端均设置有护罩闭合结构;所述驱动结构包括滑道长板、滑动块、电机、主力齿轮、第一齿轮圈、镂空定位滑筒、斜弧滑坡盖、第一弹簧杆、对接锯齿盘、长板挤压柱,所述滑道长板中端滑动连接有滑动块,滑动块前端固定连接有电机,电机前端固定连接有主力齿轮,主力齿轮左端啮合有第一齿轮圈,第一齿轮圈内表面固定连接有镂空定位滑筒,镂空定位滑筒左端内表面转动滑动连接有斜弧滑坡盖,斜弧滑坡盖下端面固定连接有第一弹簧杆,第一弹簧杆下端固定连接有对接锯齿盘,镂空定位滑筒上端内表面转动连接有长板挤压柱。
6.优选的,所述长板挤压柱右端固定连接有调节转帽,且镂空定位滑筒上端外表面固定连接有对接环,对接环中端滑动连接有定位弹簧杆,定位弹簧杆左端外表面滑动连接有第一定位板,第一定位板后端固定连接有定位支撑板,滑道长板上端固定连接有通电磁铁板,通过通电磁铁板有利于在通电时,将电机吸附在通电磁铁板下端面,便于带动主力齿轮啮合第一齿轮圈旋转。
7.优选的,所述支撑对接结构包括第二定位板、转盘、第一空心对接杆、第一实芯对接杆、短螺纹杆、驱动螺纹套、交叉杆、主力支撑板、凸出对接圆筒、对接孔、定位弯钩、定位圆环,所述底座左右两端设置有第二定位板,第二定位板中端开设有转盘,转盘后端内侧壁
固定连接有第一空心对接杆,转盘前端内侧壁固定连接有第一实芯对接杆,第一实芯对接杆与第一空心对接杆一端外表面固定连接有短螺纹杆,短螺纹杆一端螺纹连接有驱动螺纹套,且交叉杆均匀转动连接于驱动螺纹套直径内,交叉杆一端转动连接有主力支撑板,交叉杆一端转动连接有定位圆环,定位圆环内表面转动连接于第一空心对接杆与第一实芯对接杆外表面,且转盘前端外侧壁固定连接有凸出对接圆筒,对接孔均匀开设于凸出对接圆筒后端,对接孔中部滑动连接有定位弯钩,定位弯钩上端转动连接于底座前端外侧壁,第一空心对接杆前端固定连接有凹槽锯齿圆盘。
8.优选的,所述第一定位杆均匀固定连接于转盘直径内,第一定位杆一端固定连接于定位圆环一端,定位圆环一端固定连接有第二空心套筒,定位圆环一端固定连接有第二实芯对接杆。
9.优选的,所述第二定位板下端转动连接有双向螺纹杆,双向螺纹杆前端固定连接有第二齿轮,第二定位板中端滑动有放置板,放置板前后两端均固定连接于底座上端面,放置板左右两端开设有多个卡孔,且第二定位板左右两端外侧壁均固定连接有挤压板,挤压板中端滑动连接有第二弹簧杆,第二弹簧杆下端滑动连接于卡孔中部。
10.优选的,所述第二弹簧杆上端固定连接有把手,且双向螺纹杆中端转动连接有定位块,定位块下端固定连接于底座下端面,通过定位块有利于避免双向螺纹杆在旋转时发生滑动的情况。
11.优选的,所述护罩闭合结构包括连接杆、横直锯齿板、双头齿轮杆、竖直锯齿板、透视焊接遮挡板,所述第二定位板下端面固定连接有连接杆,连接杆下端固定连接有横直锯齿板,横直锯齿板啮合有双头齿轮杆一端啮合有竖直锯齿板,竖直锯齿板上端固定连接有透视焊接遮挡板。
12.优选的,所述透视焊接遮挡板左右前后两端均开设有操作孔,透视焊接遮挡板前后两端均滑动连接有移动槽板,移动槽板一端固定连接于底座左右两端外侧壁,且连接杆中端滑动连接有移动长槽,移动长槽开设于放置板前后两端,双头齿轮杆中端转动连接有第三定位板,第三定位板上端固定连接于放置板上端面。
13.与现有技术相比,本发明的有益效果是:(1)在第二定位板向内移动的同时,带动连接杆向内移动,连接杆带动横直锯齿板向内移动的同时,进行驱动双头齿轮杆旋转,双头齿轮杆带动竖直锯齿杆向上移动,并带动透视电焊遮挡板在移动槽板内向上滑动,达到了遮挡激光焊接时产生的强光从而防止伤害眼睛的目的;(2)第一弹簧杆带动对接锯齿盘对接在凹槽锯齿圆盘内,并驱动第一实芯对接杆与第一空心对接杆旋转,第一实芯对接杆与第二空心对接杆带动端螺纹杆旋转,端螺纹杆带动驱动螺纹套向内移动,并带动交叉杆向外移动,同时带动支撑板向外移动进行支撑套在支撑板外表面的圆筒材料,从而有利于同步展开支撑圆筒材料,提高对接精准度,避免了使用多个电机驱动进行展开支撑圆筒材料,易导致对接不准确的情况发生;(3)在通过双向螺纹杆带动第二定位板向内移动,并带动第二实芯对接杆插在第二空心对接杆内部,在向前推动镂空定位滑套在定位支撑板内部向后移动,并对接在凸出对接圆筒前端,达到驱动转盘旋转的目的,从而便于自动旋转空心圆柱进行焊接,避免了人工手动旋转进行焊接的繁琐。
附图说明
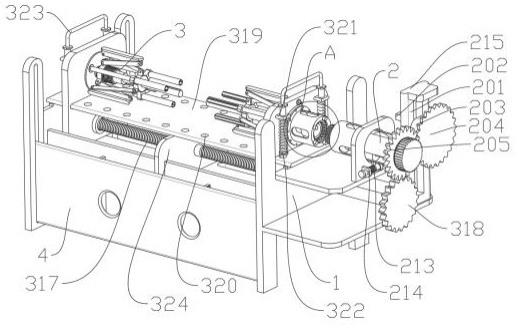
14.图1为本发明的夹持机构立体结构示意图;图2为本发明的对接环与镂空定位滑筒立体结构示意图;图3为本发明的斜弧滑坡盖与第一弹簧杆立体结构示意图;图4为本发明的长板挤压柱与调节转帽立体结构示意图;图5为本发明的支撑对接结构立体结构示意图;图6为本发明的图1中为a处的局部放大图;图7为本发明的夹持机构仰视立体结构示意图。
15.图中标号为:1、底座;2、驱动结构;201、滑道长板;202、滑动块;203、电机;204、主力齿轮;205、第一齿轮圈;206、镂空定位滑筒;207、斜弧滑坡盖;208、第一弹簧杆;209、对接锯齿盘;210、长板挤压柱;211、调节转帽;212、对接环;213、定位弹簧杆;214、第一定位板;215、通电磁铁板;3、支撑对接结构;301、第二定位板;302、转盘;303、第一空心对接杆;304、第一实芯对接杆;305、短螺纹杆;306、驱动螺纹套;307、交叉杆;308、主力支撑板;309、凸出对接圆筒;310、对接孔;311、定位弯钩;312、凹槽锯齿圆盘;313、定位圆环;314、第一定位杆;315、第二空心套筒;316、第二实芯对接杆;317、双向螺纹杆;318、第二齿轮;319、放置板;320、卡孔;321、挤压板;322、第二弹簧杆;323、把手;324、定位块;4、护罩闭合结构;401、连接杆;402、横直锯齿板;403、双头齿轮杆;404、竖直锯齿板;405、透视焊接遮挡板;406、操作孔;407、移动长槽;408、第三定位板;409、移动槽板。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.参照图1和图2和图3和图4所示,一种基于激光焊接的自我稳定夹持机构,包括底座1,所述底座1右端设置有驱动结构2,底座1上端面设置有支撑对接结构3,底座1前后两端均设置有护罩闭合结构4;驱动结构2包括滑道长板201、滑动块202、电机203、主力齿轮204、第一齿轮圈205、镂空定位滑筒206、斜弧滑坡盖207、第一弹簧杆208、对接锯齿盘209、长板挤压柱210,滑道长板201中端滑动连接有滑动块202,滑动块202前端固定连接有电机203,电机203前端固定连接有主力齿轮204,主力齿轮204左端啮合有第一齿轮圈205,第一齿轮圈205内表面固定连接有镂空定位滑筒206,镂空定位滑筒206左端内表面转动滑动连接有斜弧滑坡盖207,斜弧滑坡盖207下端面固定连接有第一弹簧杆208,第一弹簧杆208下端固定连接有对接锯齿盘209,镂空定位滑筒206上端内表面转动连接有长板挤压柱210,长板挤压柱210右端固定连接有调节转帽211,且镂空定位滑筒206上端外表面固定连接有对接环212,对接环212中端滑动连接有定位弹簧杆213,定位弹簧杆213左端外表面滑动连接有第一定位板214,第一定位板214后端固定连接有定位支撑板,滑道长板201上端固定连接有通电磁铁板215;工作时,通过外接电源带动通电磁铁板215产生磁力,并吸附电机203在滑道长板201内部向上移动固定在通电磁铁板215下端面,同时带动主力齿轮204啮合第一齿轮圈
205,第一齿轮圈205带动镂空定位滑筒206旋转,拨动定位弹簧杆213向左移动,在向前推动镂空定位滑筒206往后移动对接在凸出对接圆筒309外表面,从而通过凸出对接圆筒309驱动转盘302旋转,在需要驱动第一空心对接杆303旋转时,通过转动调节转帽211带动长板挤压柱210在斜弧滑坡盖207上端旋转滑动,待斜弧滑坡盖207滑动至平整面时,长板挤压柱210推动斜弧滑坡盖207与第一弹簧杆208向后移动,并带动对接锯齿盘209对接在凹槽锯齿圆盘312内部,达到驱动第一空心对接杆303的目的,从而有利于进行调节驱动,避免了使用多个电机203或者手动驱动的繁琐操作。
18.作为本发明的一种实施例,参照图1和图5和图6所示,支撑对接结构3包括第二定位板301、转盘302、第一空心对接杆303、第一实芯对接杆304、短螺纹杆305、驱动螺纹套306、交叉杆307、主力支撑板308、凸出对接圆筒309、对接孔310、定位弯钩311、定位圆环313,底座1左右两端设置有第二定位板301,第二定位板301中端开设有转盘302,转盘302后端内侧壁固定连接有第一空心对接杆303,转盘302前端内侧壁固定连接有第一实芯对接杆304,第一实芯对接杆304与第一空心对接杆303一端外表面固定连接有短螺纹杆305,短螺纹杆305一端螺纹连接有驱动螺纹套306,且交叉杆307均匀转动连接于驱动螺纹套306直径内,交叉杆307一端转动连接有主力支撑板308,交叉杆307一端转动连接有定位圆环313,定位圆环313内表面转动连接于第一空心对接杆303与第一实芯对接杆304外表面,且转盘302前端外侧壁固定连接有凸出对接圆筒309,对接孔310均匀开设于凸出对接圆筒309后端,对接孔310中部滑动连接有定位弯钩311,定位弯钩311上端转动连接于底座1前端外侧壁,第一空心对接杆303前端固定连接有凹槽锯齿圆盘312,第一定位杆314均匀固定连接于转盘302直径内,第一定位杆314一端固定连接于定位圆环313一端,定位圆环313一端固定连接有第二空心套筒315,定位圆环313一端固定连接有第二实芯对接杆316,第二定位板301下端转动连接有双向螺纹杆317,双向螺纹杆317前端固定连接有第二齿轮318,第二定位板301中端滑动有放置板319,放置板319前后两端均固定连接于底座1上端面,放置板319左右两端开设有多个卡孔320,且第二定位板301左右两端外侧壁均固定连接有挤压板321,挤压板321中端滑动连接有第二弹簧杆322,第二弹簧杆322下端滑动连接于卡孔320中部,第二弹簧杆322上端固定连接有把手323,且双向螺纹杆317中端转动连接有定位块324,定位块324下端固定连接于底座1下端面。
19.工作时,通过将需要焊接的空心圆柱套在主力支撑板308外表面上,在将通电磁铁板215结束通电,使电机203在滑道长板201内向下滑动,并将主力齿轮204啮合在第二齿轮318上,第二齿轮318带动双向螺纹杆317旋转,双向螺纹杆317带动第二定位板301向内移动,使第一实芯对接杆304插入在第一空心对接杆303内部,便于第一弹簧杆208带动对接锯齿盘209对接在凹槽锯齿圆盘312内,并驱动第一实芯对接杆304与第一空心对接杆303旋转,第一实芯对接杆304与第一空心对接杆303带动短螺纹杆305旋转,短螺纹杆305带动驱动螺纹套306向内移动,并带动交叉杆307向外移动,同时带动主力支撑板308向外移动进行支撑空心圆筒,从而有利于同步展开支撑空心圆筒,提高对接精准度,避免了使用多个电机203驱动进行展开支撑空心圆筒,易导致对接不准确的情况发生,在支撑完成后,在通过双向螺纹杆317带动第二定位板301向内移动,并带动第二实芯对接杆316插在第二空心套筒315内部,在向前推动镂空定位滑筒206在定位支撑板内部向后移动,并对接在凸出对接圆筒309前端,达到驱动转盘302旋转的目的,从而便于自动旋转空心圆柱进行焊接,避免了人
工手动旋转进行焊接的繁琐,并加大了生产效率。
20.作为本发明的一种实施例,参照图7所示,护罩闭合结构4包括连接杆401、横直锯齿板402、双头齿轮杆403、竖直锯齿板404、透视焊接遮挡板405,第二定位板301下端面固定连接有连接杆401,连接杆401下端固定连接有横直锯齿板402,横直锯齿板402啮合有双头齿轮杆403一端啮合有竖直锯齿板404,竖直锯齿板404上端固定连接有透视焊接遮挡板405,透视焊接遮挡板405左右前后两端均开设有操作孔406,透视焊接遮挡板405前后两端均滑动连接有移动槽板409,移动槽板409一端固定连接于底座1左右两端外侧壁,且连接杆401中端滑动连接有移动长槽407,移动长槽407开设于放置板319前后两端,双头齿轮杆403中端转动连接有第三定位板408,第三定位板408上端固定连接于放置板319上端面。
21.工作时,在第二定位板301向内移动的同时,带动连接杆401向内移动,连接杆401带动横直锯齿板402向内移动的同时,进行驱动双头齿轮杆403旋转,双头齿轮杆403带动竖直锯齿板404向上移动,并带动透视焊接遮挡板405在移动槽板409内向上滑动,达到了遮挡激光焊接时产生的强光从而防止伤害眼睛的目的。
22.工作原理:通过将需要焊接的空心圆柱套在主力支撑板308外表面上,在将通电磁铁板215结束通电,使电机203在滑道长板201内向下滑动,并将主力齿轮204啮合在第二齿轮318上,第二齿轮318带动双向螺纹杆317旋转,双向螺纹杆317带动第二定位板301向内移动,使第一实芯对接杆304插入在第一空心对接杆303内部,便于通过转动调节转帽211带动长板挤压柱210在斜弧滑坡盖207上端旋转滑动,待斜弧滑坡盖207滑动至平整面时,长板挤压柱210推动斜弧滑坡盖207与第一弹簧杆208向后移动,并带动对接锯齿盘209对接在凹槽锯齿圆盘312内部,达到驱动第一空心对接杆303与第一实芯对接杆304的目的,第一实芯对接杆304与第一空心对接杆303带动短螺纹杆305旋转,短螺纹杆305带动驱动螺纹套306向内移动,并带动交叉杆307向外移动,同时带动主力支撑板308向外移动进行支撑空心圆筒,从而有利于同步展开支撑空心圆筒,提高对接精准度,避免了使用多个电机203驱动进行展开支撑空心圆筒,易导致对接不准确的情况发生,在支撑完成后,再通过双向螺纹杆317带动第二定位板301向内移动,并带动第二实芯对接杆316插在第二空心套筒315内部,在向前推动镂空定位滑筒206在定位支撑板内部向后移动,并对接在凸出对接圆筒309前端,达到驱动转盘302旋转的目的,从而便于自动旋转空心圆柱进行焊接,在第二定位板301向内移动的同时,并带动连接杆401向内移动,连接杆401带动横直锯齿板402向内移动的同时,进行驱动双头齿轮杆403旋转,双头齿轮杆403带动竖直锯齿板404向上移动,并带动透视焊接遮挡板405在移动槽板409内向上滑动,达到了遮挡激光焊接时产生的强光从而防止伤害眼睛的目的。
23.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1