适用于机器人铆接的铆枪头部浮动机构的制作方法
1.本实用新型属于铆接设备技术领域,尤其涉及一种适用于机器人铆接的铆枪头部浮动机构。
背景技术:
2.铆接即铆钉连接,是利用轴向力将零件铆钉孔内钉杆墩粗并形成钉头,使多个零件相连接的方法。
3.目前工业生产中,多使用机器人铆接或自动装配的铆枪进行铆接操作,但是市面上的铆枪常因对孔不准导致铆接螺母无法插入孔位,或者插入孔位后铆螺母法兰面与产品表面不贴合。
4.一篇公告号为cn206009620u的中国专利公开了一种自动压铆机构,至少包括:抗弯c型架、供定位待压铆产品的定位座、压铆头、气动浮动接头,以及气液增压缸;所述抗弯c型架的开口具有上下对称的上壁面、下壁面,以及连接所述的上壁面和下壁面的竖直壁面;所述竖直壁面设有两个导向机构;所述定位座设在所述上壁面上;所述压铆头位于所述下壁面上方,且其底面与气动浮动接头相连;所述气动浮动接头位于两个所述导向机构中间且与两个所述导向机构相连;所述气液增压缸与所述气动浮动接头相连,且部分所述气液增压缸穿设在所述抗弯c型架中。该实用新型中采用液压气动浮动接头带动压铆头产生偏移和复位,整体结构复杂,成本高,且若铆枪重量较重,则浮动效果差。
技术实现要素:
5.本实用新型的目的是针对现有的技术存在上述问题,提出了适用于机器人铆接的铆枪头部浮动机构,通过采用滑块组成的浮动机构驱动拉铆杆沿水平方向移动以及复位,整体结构简单紧凑、成本低、机械化程度高,大大提高了工作效率。
6.本实用新型的目的可通过下列技术方案来实现:适用于机器人铆接的铆枪头部浮动机构,包括:
7.本体和拉铆杆,所述本体内设置有供所述拉铆杆上下运动的腔体,且所述本体上设置有驱动所述拉铆杆沿水平方向移动以及复位的浮动机构,其中,所述浮动机构包括沿所述拉铆杆轴线方向依次插接配合的第一滑块、第二滑块和第三滑块,且所述第一滑块连接于所述本体上。
8.在上述的适用于机器人铆接的铆枪头部浮动机构中,初始状态下,第一滑块、第二滑块以及第三滑块分别与拉铆杆同轴设置。
9.在上述的适用于机器人铆接的铆枪头部浮动机构中,所述第一滑块和所述第二滑块之间设有第一插接部,所述第二滑块与所述第三滑块之间设有第二插接部,其中,第一插接部与第二插接部在同一水平面上的投影相互垂直。
10.在上述的适用于机器人铆接的铆枪头部浮动机构中,第一插接部包括位于第一滑块和第二滑块之间的第一凹凸结构,并在第一凹凸结构上设置有第一环形凹槽,且在第一
环形凹槽内嵌装有第一挡圈;第二插接部包括位于第二滑块和第三滑块之间的第二凹凸结构,并在第二凹凸结构上设置有第二环形凹槽,且在第二环形凹槽内嵌装有第二挡圈。
11.在上述的适用于机器人铆接的铆枪头部浮动机构中,第一凹凸结构包括设置于第一滑块上的凹部或者凸部,以及对应设置于第二滑块上的凸部或者凹部;第二凹凸结构包括设置于第二滑块上的凹部或者凸部,以及对应设置于第三滑块上凸部或者凹部。
12.在上述的适用于机器人铆接的铆枪头部浮动机构中,所述第一挡圈和所述第二挡圈沿所述拉铆杆的轴向呈上下平行分布。
13.在上述的适用于机器人铆接的铆枪头部浮动机构中,所述本体内设置有弹性件,所述弹性件的一端抵接于所述本体上,所述弹性件的另一端抵接于所述第三滑块上。
14.在上述的适用于机器人铆接的铆枪头部浮动机构中,所述拉铆杆上连接有锁紧螺母,所述第三滑块通过所述锁紧螺母连接于所述拉铆杆上。
15.在上述的适用于机器人铆接的铆枪头部浮动机构中,所述拉铆杆的一端在所述腔体内上下运动,所述拉铆杆的另一端连接有用于压合产品的铆接螺母。
16.在上述的适用于机器人铆接的铆枪头部浮动机构中,所述第二滑块和所述第三滑块均与所述本体在水平方向上存在间隙。
17.与现有技术相比,本实用新型的有益效果:
18.(1)、本实用新型提供的适用于机器人铆接的铆枪头部浮动机构,通过在本体内设置浮动机构,使得当铆枪与孔位存在小幅度偏移时,拉铆杆可随浮动机构沿水平方向产生小幅度偏移,避免因对孔不准导致铆枪无法插入孔位或插入孔后铆钉与产品表面不贴合。
19.(2)、通过将浮动机构设置为三个滑块依次插接配合,使得浮动机构一端与本体固定,另一端可沿水平方向产生偏移,结构简单、灵活且适用范围广。
附图说明
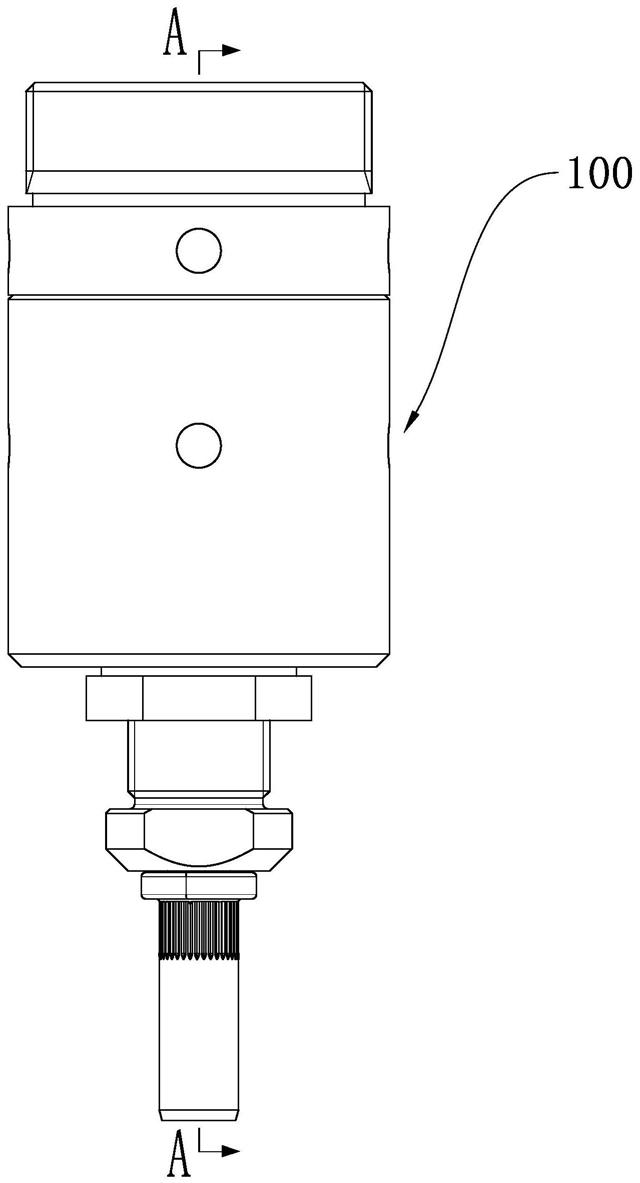
20.图1是本实用新型适用于机器人铆接的铆枪头部浮动机构的整体结构示意图。
21.图2是本实用新型适用于机器人铆接的铆枪头部浮动机构的a-a剖视图。
22.图3是本实用新型适用于机器人铆接的铆枪头部浮动机构的b-b剖视图。
23.图中,100、本体;110、腔体;200、拉铆杆;300、浮动机构;310、第一滑块;320、第二滑块;330、第三滑块;340、第一插接部;350、第二插接部;400、挡圈;410、第一挡圈;420、第二挡圈;500、弹性件;600、锁紧螺母。
具体实施方式
24.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
25.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
26.如图1至图3所示,本实用新型提供了适用于机器人铆接的铆枪头部浮动机构,包括:本体100和拉铆杆200,所述本体100内设置有供所述拉铆杆200上下运动的腔体110,且所述本体100上设置有驱动所述拉铆杆200沿水平方向移动以及复位的浮动机构300,其中,
所述浮动机构300包括沿所述拉铆杆200轴线方向依次插接配合的第一滑块310、第二滑块320和第三滑块330,且所述第一滑块310连接于所述本体100上。
27.本实用新型提供的适用于机器人铆接的铆枪头部浮动机构,通过在本体100内设置浮动机构300,使得在铆接过程中,若拉铆杆200与孔位存在小幅度的偏差,则在浮动机构300的作用下,拉铆杆200可随浮动机构300沿水平方向进行小幅度的偏移,使得拉铆杆200可带动铆钉插入产品孔,避免因对孔不准导致拉铆杆200无法插入孔位或插入孔位后铆钉与产品表面不贴合,整体结构简单、成本低廉,且适用范围广,可应用于大型铆枪上。
28.优选地,如图1至图3所示,初始状态下,第一滑块310、第二滑块320以及第三滑块330分别与拉铆杆200同轴设置。
29.在本实施例中,初始状态时,三个滑块均与拉铆杆200同轴设置,且第一滑块310与本体100固定连接,第二滑块320分别与第一滑块310和第三滑块330插接配合,第三滑块330与拉铆杆200固定连接,在实际使用中,当拉铆杆200与孔位存在小幅度偏差时,拉铆杆200可在铆钉的倒角作用下顺利进入孔位,且铆钉在压到底后可自行摆正,工作完毕后,拉铆杆200退出孔位,在挡圈400的作用下即可使拉铆杆200恢复至与三个滑块同轴的位置,等待下一次工作。整个工作过程快速高效,既避免了铆钉无法插入孔位而导致生产不良,还避免了铆枪因强行错位铆接而导致拉铆杆200断裂。
30.优选地,如图1至图3所示,所述第一滑块310和所述第二滑块320之间设有第一插接部340,所述第二滑块320与所述第三滑块330之间设有第二插接部350,其中,第一插接部340与第二插接部350在同一水平面上的投影相互垂直。
31.在本实施例中,第二滑块320分别与第一滑块310和第三滑块330插接配合,且第一插接部340和第二插接部350在水平方向上相互垂直,即浮动机构300可在一定范围内沿水平方向任意移动,在实际使用中,即拉铆杆200可在一定范围内沿水平方向任意偏移,大大提高了拉铆杆200的使用灵活性,铆接范围广、效率高、使用寿命长。
32.优选地,如图1至图3所示,第一插接部340包括位于第一滑块310和第二滑块320之间的第一凹凸结构(附图中未标识),并在第一凹凸结构上设置有第一环形凹槽(附图中未标识),且在第一环形凹槽内嵌装有第一挡圈410;第二插接部350包括位于第二滑块320和第三滑块330之间的第二凹凸结构(附图中未标识),并在第二凹凸结构上设置有第二环形凹槽(附图中未标识),且在第二环形凹槽内嵌装有第二挡圈420。
33.进一步优选地,第一凹凸结构包括设置于第一滑块310上的凹部或者凸部,以及对应设置于第二滑块320上的凸部或者凹部;第二凹凸结构包括设置于第二滑块320上的凹部或者凸部,以及对应设置于第三滑块330上的凸部或者凹部。
34.进一步优选地,所述第一挡圈410和所述第二挡圈420沿所述拉铆杆200的轴向呈上下平行分布。
35.进一步优选地,第一滑块310、第二滑块320以及第三滑块330为十字滑块。
36.在本实施例中,第一滑块310与第二滑块320之间以及第二滑块320与第三滑块330之间均为凹凸配合,且配合处均设置有凹槽,凹槽内嵌装有挡圈400,其中,第一挡圈410和第二挡圈420沿拉铆杆200的轴向呈上下平行分布,在铆枪完成铆接工作后通过挡圈400使拉铆杆200回复至与三个滑块同轴的位置,自行复位,无需人工看管操作,省时省力。
37.优选地,如图1至图3所示,所述本体100内设置有弹性件500,所述弹性件500的一
端抵接于所述本体100上,所述弹性件500的另一端抵接于所述第三滑块330上。
38.进一步优选地,弹性件500设置为宝塔弹簧。
39.进一步优选地,所述拉铆杆200上连接有锁紧螺母600,所述第三滑块330通过所述锁紧螺母600连接于所述拉铆杆200上。
40.在本实施例中,第三滑块330与本体100间连接有宝塔弹簧,且第三滑块330还通过锁紧螺母600连接于拉铆杆200上,宝塔弹簧用于顶紧三个滑块,稳定三个滑块的轴向尺寸,锁紧螺母600则将第三滑块330与拉铆杆200固定连接,使得拉铆杆200可随滑块的运动而运动,即可与滑块实现偏心随动,整体结构紧凑合理。
41.优选地,所述第二滑块320和所述第三滑块330均与所述本体100在水平方向上存在间隙。
42.在本实施例中,第二滑块320和第三滑块330均与本体100在水平方向上存在一定的间隙,使得第二滑块320和第三滑块330既可以在水平方向任意进行偏移,还不会因偏移幅度过大而错位,设计合理紧凑。
43.优选地,所述拉铆杆200的一端在所述腔体110内上下运动,所述拉铆杆200的另一端连接有用于压合产品的铆接螺母。
44.在本实施例中,拉铆杆200的一端随着铆接过程中的上下运动在腔体110内运动,另一端连接有铆接螺母,通过铆接螺母将产品压合进孔内,整个铆接过程均可实现自动化操作,机械自动化程度高,降低了人工成本。
45.需要说明的是,在本实用新型中如涉及“第一”、“第二”、“一”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
46.另外,本实用新型各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
47.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1