一种高精度数控机床的制作方法
1.本技术涉及机床的技术领域,尤其是涉及一种高精度数控机床。
背景技术:
2.数控机床是数字控制机床的简称,是一种装有程序控制系统的自动化机床。
3.相关技术可参考授权公告号为cn204339467u的中国实用新型专利,其公开了一种数控机床, 通过在刀具夹持机构的垂直轴向上设置有第一激光发射器,加工体夹持机构设置有第一光接收器,第一激光发射器和第一激光接收器位置对应,刀具夹持机构的水平轴向上设置有第二激光发射器, 加工体夹持机构设置有第二激光接收器,第二激光发射器和第二激光接收器位置对应的激光对准系统。
4.针对上述中的相关技术,发明人认为存在有以下缺陷:刀具在对工件加工时,操作员需要移动工件,便于对工件加工,但是,当工件的尺寸较大时,操作员移动工件不便,导致工件的加工精度较低。
技术实现要素:
5.为了改善工件在机床上的移动便捷性较低的问题,本技术提供一种高精度数控机床。
6.本技术提供的一种高精度数控机床采用如下的技术方案:
7.一种高精度数控机床,包括机体,所述机体设有切割台和切割刀,所述切割台开设有多个第一凹槽,每个所述第一凹槽均沿切割台的长度方向延伸设置,且多个第一凹槽相互平行,所述切割台开设有多个第二凹槽,多个所述第二凹槽均沿切割台宽度方向延伸设置,且多个所述第二凹槽相互平行,所述切割台设有用于支撑工件的支撑组件。
8.通过采用上述技术方案,操作员将工件放置在支撑组件上,利用支撑组件将工件支撑,操作员驱动支撑组件第一凹槽内滑动,便于将工件运输,从而便于刀具对工件进行加工,操作员能够驱动支撑组件在第二凹槽内滑动,便于加工工件的不同位置,从而实现便捷将工件移动的目的。
9.可选的,所述支撑组件包括推板,所述推板沿水平方向设置,且所述推板沿水平方向与切割台滑动连接,所述推板的底端设有多个滑轮,多个所述滑轮分别位于推板的拐角处。
10.通过采用上述技术方案,操作员将工件放置在推板,利用推板能够将工件支撑,操作员将推板滑进第一凹槽内,操作员推动推板,通过滑轮在第一凹槽内的滑动实现驱动工件移动的目的,当需要改变工件运动的方向时,操作员驱动滑动位于第二凹槽内,实现滑轮在第二凹槽内滑动的目的,从而实现改变工件移动方向的目的,进而实现便捷将工件移动的目的。
11.可选的,每个所述第一凹槽的底端均设有第一延伸槽,每个所述第一延伸槽的宽度均大于该所述第一延伸槽对应的第一凹槽的宽度;每个所述第二凹槽的底端均设有第二
延伸槽,每个所述第二延伸槽的宽度均大于该所述第二延伸槽对应的第二凹槽的宽度。
12.通过采用上述技术方案,当滑轮在第一凹槽和第二凹槽内滑动时,第一延伸槽和第二延伸槽的设置能够实现将滑轮限位的目的,降低滑轮在滑动过程中,从第一凹槽或者第二凹槽内滑出的可能,从而降低推板脱离切割台的可能。
13.可选的,所述切割台的底端设有支撑台,所述切割台与支撑台转动连接,所述切割台的转轴竖直设置,所述支撑台设有用于驱动切割台转动的驱动机构。
14.通过采用上述技术方案,操作员需要利用刀具切割工件的不同位置时,操作员启动驱动机构,驱动机构启动后,能够驱动切割台转动,切割台的转动能够调动工件转动,从而对工件的不同位置进行加工,降低人工移动工件的可能,从而节省人工劳动强度。
15.可选的,所述驱动机构包括沿竖直方向设置的承接柱,所述承接柱位于切割台的底端,且所述承接柱沿竖直方向穿设于支撑台,所述承接柱外壁固定连接有蜗轮,所述支撑台内设有与蜗轮啮合的蜗杆,所述蜗杆与支撑台转动连接。
16.通过采用上述技术方案,操作员驱动蜗杆转动,蜗杆的转动能够带动蜗轮转动,蜗轮的转动带动承接柱转动,通过承接柱的转动切割台转动,通过切割台的转动实现带动工件转动的目的,从而实现对工件的不同位置进行加工,降低人工移动工件的可能,减小人工劳动强度。
17.可选的,所述支撑台内设有防护罩,所述防护罩与蜗杆适配,且所述蜗杆位于防护罩内。
18.通过采用上述技术方案,防护罩能够将蜗杆远离蜗轮的一侧覆盖,当蜗杆在转动时,防护罩的设置能够起到保护蜗杆的目的。
19.可选的,所述切割台的边沿开设有多个限位孔,所述切割台设有与限位孔适配的限位杆,每个所述限位杆的底端均固定连接有磁块。
20.通过采用上述技术方案,当切割台在蜗轮和蜗杆的驱动下转动后,操作员将限位杆插入到限位孔内,利用磁块与支撑台的吸合,实现将切割台限位的目的,降低切割台转动的可能。
21.可选的,所述限位杆远离磁块的一端设有滚球,所述滚球的直径大于限位杆的直径。
22.通过采用上述技术方案,操作员在使用限位杆时,滚球的设置能够增大操作员手与限位杆的接触面积,使得操作员在使用限位杆时更便捷。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.操作员将工件放置在支撑组件上,利用支撑组件将工件支撑,操作员驱动支撑组件第一凹槽内滑动,便于将工件运输,从而便于刀具对工件进行加工,操作员能够驱动支撑组件在第二凹槽内滑动,便于加工工件的不同位置,从而实现便捷将工件移动的目的;
25.2.操作员将工件放置在推板,利用推板能够将工件支撑,操作员将推板滑进第一凹槽内,操作员推动推板,通过滑轮在第一凹槽内的滑动实现驱动工件移动的目的,当需要改变工件运动的方向时,操作员驱动滑动位于第二凹槽内,实现滑轮在第二凹槽内滑动的目的,从而实现改变工件移动方向的目的,进而实现便捷将工件移动的目的;
26.3.当滑轮在第一凹槽和第二凹槽内滑动时,第一延伸槽和第二延伸槽的设置能够实现将滑轮限位的目的,降低滑轮在滑动过程中,从第一凹槽或者第二凹槽内滑出的可能,
从而降低推板脱离切割台的可能。
附图说明
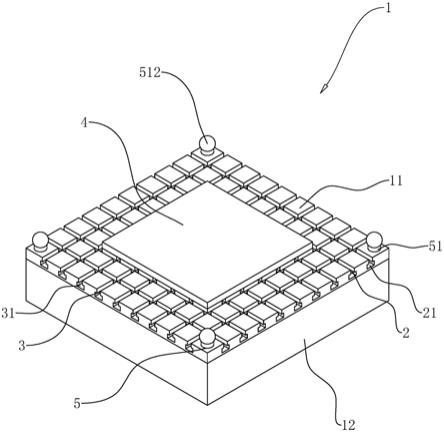
27.图1是本技术实施例的整体结构示意图。
28.图2是本技术实施例突显推板、滑轮的位置关系示意图。
29.图3是本技术实施例突显蜗轮、蜗杆、承接柱的位置关系剖视图。
30.图4是本技术实施例凸显磁块、滚球的位置关系放大图。
31.附图标记说明:1、机体;11、切割台;111、承接柱;12、支撑台;2、第一凹槽;21、第一延伸槽;3、第二凹槽;31、第二延伸槽;4、推板;41、滑轮;5、限位孔;51、限位杆;511、磁块;512、滚球;6、电机;61、防护罩;62、蜗杆;63、蜗轮。
具体实施方式
32.以下结合附图1
‑
4对本技术作进一步详细说明。
33.本技术实施例公开一种高精度数控机床。参照图1,高精度数控机床包括机体1,机体1包括切割台11和支撑台12,切割台11和支撑台12均沿水平方向设置,切割台11位于支撑台12的上方,且切割台11与支撑台12转动连接,切割台11的转轴竖直设置,机体1设有用于驱动切割台11转动的驱动机构,切割台11设有用于承接工件的支撑组件。操作员将工件放置在支撑组件,支撑组件用于将工件支撑,便于工件的移动和加工。
34.参照图1,操作员利用支撑组件能够将工件支撑,操作员驱动支撑组件,支撑组件能够驱动工件在切割台11移动,通过工件的运动,便于对工件的不同位置进行加工,降低人工移动工件的可能,从而提高工件移动的便捷性。
35.参照图1、图2,支撑组件包括推板4,推板4呈板状,推板4的尺寸小于切割台11的尺寸,推板4水平设置,推板4沿水平方向与切割台11滑动连接,推板4的底端设有四个滑轮41,每个滑轮41均水平设置,且四个滑轮41均位于推板4的四个拐角处,每个滑轮41均与推板4固转动连接,每个滑轮41的转轴均竖直设置,每个滑轮41均与切割台11抵触。
36.参照图1、图2,操作员将工件放置在推板4上,利用推板4能够将工件支撑,操作员推动推板4,通过滑轮41在切割台11的滑动实现带动推板4移动的目的,推板4的移动驱动工件移动,滑轮41的设置能够减小工件与切割台11的接触面积,使得工件在切割台11的移动更便捷。
37.参照图1,切割台11开设有多个第一凹槽2,每个第一凹槽2均沿切割台11的长度方向延伸设置,每个第一凹槽2的槽向均水平设置,多个第一凹槽2相互平行;切割台11开设有多个第二凹槽3,每个第二凹槽3均沿切割台11的宽度方向延伸设置,多个第二凹槽3相互平行,第二凹槽3的槽向与第一凹槽2的槽向垂直。
38.参照图1、图2,四个滑轮41均位于第一凹槽2内,滑轮41能够在第一凹槽2内滑动,当需要改变工件的移动方向时,操作员驱动滑轮41移动至第二凹槽3内,通过滑轮41在第二凹槽3内的滑动,实现改变工件移动方向的目的。
39.参照图1、图2,由于第一凹槽2和第二凹槽3连通,使得滑轮41能够改变滑动轨迹,使得滑轮41能够在第一凹槽2和第二凹槽3内滑动;同时,第一凹槽2和第二凹槽3的设置能够实现将滑轮41限位的目的,使得工件在移动过程中能够更稳定。
40.参照图1,每个第一凹槽2均开设有第一延伸槽21,第一延伸槽21位于第一凹槽2的底端,每个第一延伸槽21的宽度均大于该第一延伸槽21对应的第一凹槽2的宽度,且第一延伸槽21与第一凹槽2连通;每个第二凹槽3均开设有第二延伸槽31,第二延伸槽31位于第二凹槽3的底端,每个第二延伸槽31的宽度均大于该第二延伸槽31对应的第二凹槽3的宽度,且第二延伸槽31与第二凹槽3连通。
41.参照图1、图2,当滑轮41在第一凹槽2和第二凹槽3内滑动时,第一延伸槽21和第二延伸槽31的设置能够实现将滑轮41限位的目的,从而实现将推板4限位的目的,降低推板4在将工件移动过程中,推板4向上翘起的可能,从而降低推板4推离切割台11的可能,提高推板4在将工件移动过程中的稳定性。
42.参照图1、图3,驱动机构包括承接柱111,承接柱111沿竖直方向设置,承接柱111呈圆柱状,承接柱111位于切割台11的底端,承接柱111与切割台11的底端中部固定连接,承接柱111自靠近切割台11的一端向远离切割台11的一端向下延伸设置,承接柱111沿竖直方向穿设于支撑台12,且承接柱111与支撑台12转动连接。
43.参照图1、图3,通过承接柱111的转动能够带动切割台11转动,当工件位于切割台11时,通过切割台11的转动能够实现带动工件转动的目的,便于对工件的不用位置加工,提高工件加工使得便捷性。
44.参照图3,承接柱111的外壁设有蜗轮63,蜗轮63与承接柱111同轴固定连接,支撑台12内设有与蜗轮63啮合的蜗杆62,蜗杆62沿水平方向设置,蜗杆62沿水平方向与支撑台12转动连接,支撑台12内设有电机6,电机6的底座与支撑台12固定连接,电机6的输出轴与蜗杆62的端部同轴固定连接。
45.参照图1、图3,当需要对工件的不同位置进行加工时,操作员启动电机6,电机6启动后,能够驱动蜗杆62转动,蜗杆62的转动带动蜗轮63转动,蜗轮63的转动承接柱111转动,通过承接柱111的转动,带动切割台11转动,从而实现带动工件转动的目的,以便于对工件的不同位置进行加工。
46.参照图3,支撑台12内设有防护罩61,防护罩61呈长方体状,防护罩61与蜗杆62适配,且防护罩61靠近蜗杆62的一侧设为开口,防护罩61与支撑台12固定连接,蜗杆62位于防护罩61内,电机6的输出轴穿设于防护罩61的端部并与蜗杆62的端部同轴固定连接。当蜗杆62在转动时,防护罩61的设置能够起到保护蜗杆62的目的。
47.参照图1、图4,切割台11的边沿开设有多个限位孔5,每个限位孔5均沿竖直方向设置,切割台11设有与限位孔5适配的限位杆51,限位杆51沿竖直方向设置,每个限位杆51的底端均设有磁块511,每个磁块511均该磁块511对应的限位杆51固定连接,每个磁块511的直径均与该磁块511对应的限位杆51的直径固定连接。
48.参照图1、图4,当切割台11转动后,操作员将限位杆51穿设于限位孔5内,利用磁块511与支撑台12的吸合,实现将切割台11限位的目的,降低切割台11转动的可能,从而提高工件在加工过程中的稳定性。
49.参照图1、图4,限位杆51远离磁块511的一端设有滚球512,滚球512的直径大于限位杆51的直径,滚球512与限位杆51固定连接。操作员在使用限位杆51时,滚球512的设置能够增大操作员手与限位杆51的接触面积,使得操作员在使用限位杆51时更便捷
50.本技术实施例一种高精度数控机床的实施原理为:操作员将工件放置在推板4上,
通过滑轮41在第一凹槽2和第二凹槽3内的滑动,实现带动工件在切割台11移动的目的,提高工件运动的便捷行;同时,通过切割台11的转动,能够带动工件转动,利用磁块511与支撑台12的吸合,能够将切割台11限位固定,便于对工件的不同位置加工。
51.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1