一种焊接机器人夹具的制作方法
1.本实用新型涉及焊接机器人领域,尤其是一种焊接机器人夹具。
背景技术:
2.焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。根据国际标准化组织(iso)工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(manipulator),具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂。焊接机器人一般对焊接夹具上的焊接件进行焊接,但焊接件一般固定在夹具上,导致焊接件底部被夹具遮挡,即使焊接机器人能多方位移动,但无法对夹具底部位置的焊接件部分进行焊接,这样焊接就十分不便。
技术实现要素:
3.为了克服现有技术中所存在的上述缺陷,本实用新型提供了一种焊接机器人夹具。
4.本实用新型解决其技术问题所采用的技术方案是:一种焊接机器人夹具,包括底座,所述底座中水平设置导杆,所述底座两侧竖直设置固定架,所述固定架顶部水平固定连接横梁,所述横梁中部设双向电机,所述双向电机两端各设丝杠,所述丝杠与横梁转动设置,所述丝杠上套设螺块,所述螺块底部竖直固定设置夹板,所述夹板底部与导杆滑动连接,所述夹板相背面上水平设置电机固定板,所述电机固定板上设电机,所述电机输出端设转盘,所述转盘与夹板转动设置。
5.上述的一种焊接机器人夹具,所述导杆上套设弹簧,所述弹簧两端分别与底座和夹板固定连接,所述弹簧在导杆两侧对称设置。
6.上述的一种焊接机器人夹具,所述电机同步转动。
7.本实用新型的有益效果是,本实用新型双向电机带动丝杠转动,丝杠上的螺块同时相对运动,根据工件体积调节夹板间距,将工件在转盘间夹紧,弹簧处于压缩状态,保持对夹板的推力,电机带动转盘转动调节工件不同的加工面,结构简单,操作方便,对不同规格的工件适应性好,实用性强。
附图说明
8.下面结合附图和实施例对本实用新型进一步说明。
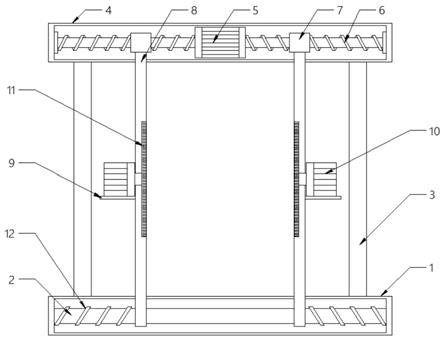
9.图1为本实用新型的结构示意图。
10.图中1.底座,2.导杆,3.固定架,4.横梁,5.双向电机,6.丝杠,7.螺块,8.夹板,9.电机固定板,10.电机,11.转盘,12.弹簧。
具体实施方式
11.为了更清楚地说明本实用新型的技术方案,下面结合附图对本实用新型做进一步的说明,显而易见地,下面所描述的附图仅仅是本实用新型的一个实施例,对于本领域的普通技术人员来讲,在不付出创造性劳动的前提下,根据此附图和实施例获得其他的实施例,都属于本实用新型的保护范围。
12.一种焊接机器人夹具,包括底座1,所述底座1中水平设置导杆2,所述底座1两侧竖直设置固定架3,所述固定架3顶部水平固定连接横梁4,所述横梁4中部设双向电机5,所述双向电机5两端各设丝杠6,所述丝杠6与横梁4转动设置,所述丝杠6上套设螺块7,所述螺块7底部竖直固定设置夹板8,所述夹板8底部与导杆2滑动连接,所述夹板8相背面上水平设置电机固定板9,所述电机固定板9上设电机10,所述电机10输出端设转盘11,所述转盘11与夹板8转动设置。
13.详细的,所述导杆2上套设弹簧12,所述弹簧12两端分别与底座1和夹板8固定连接,所述弹簧12在导杆2两侧对称设置,所述电机10同步转动。
14.使用时,双向电机5带动丝杠6转动,丝杠6上的螺块7同时相对运动,根据工件体积调节夹板8间距,将工件在转盘11间夹紧,弹簧12处于压缩状态,保持对夹板8的推力,电机10带动转盘11转动调节工件不同的加工面,结构简单,操作方便,对不同规格的工件适应性好,实用性强。
15.以上实施例仅为本实用新型的示例性实施例,不用于限制本实用新型,本实用新型的保护范围由权利要求书限定。本领域技术人员可以在本实用新型的实质和保护范围内,对本实用新型做出各种修改或等同替换,这种修改或等同替换也应视为落在本实用新型的保护范围内。
技术特征:
1.一种焊接机器人夹具,包括底座(1),其特征在于:所述底座(1)中水平设置导杆(2),所述底座(1)两侧竖直设置固定架(3),所述固定架(3)顶部水平固定连接横梁(4),所述横梁(4)中部设双向电机(5),所述双向电机(5)两端各设丝杠(6),所述丝杠(6)与横梁(4)转动设置,所述丝杠(6)上套设螺块(7),所述螺块(7)底部竖直固定设置夹板(8),所述夹板(8)底部与导杆(2)滑动连接,所述夹板(8)相背面上水平设置电机固定板(9),所述电机固定板(9)上设电机(10),所述电机(10)输出端设转盘(11),所述转盘(11)与夹板(8)转动设置。2.根据权利要求1所述的一种焊接机器人夹具,其特征在于,所述导杆(2)上套设弹簧(12),所述弹簧(12)两端分别与底座(1)和夹板(8)固定连接,所述弹簧(12)在导杆(2)两侧对称设置。3.根据权利要求1所述的一种焊接机器人夹具,其特征在于,所述电机(10)同步转动。
技术总结
本实用新型公开了一种焊接机器人夹具,涉及焊接机器人领域,包括底座,所述底座中水平设置导杆,所述底座两侧竖直设置固定架,所述固定架顶部水平固定连接横梁,所述横梁中部设双向电机,所述双向电机两端各设丝杠,所述丝杠与横梁转动设置,所述丝杠上套设螺块,所述螺块底部竖直固定设置夹板,所述夹板底部与导杆滑动连接,所述夹板相背面上水平设置电机固定板,所述电机固定板上设电机,所述电机输出端设转盘,所述转盘与夹板转动设置。本实用新型结构简单,操作方便,对不同规格的工件适应性好,实用性强。实用性强。实用性强。
技术研发人员:蒋苏艳 朱立鹏 庞龙业
受保护的技术使用者:青岛金莱斯自动化设备有限公司
技术研发日:2021.07.16
技术公布日:2021/11/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1