一种自动制罐生产线的压合结构的制作方法
1.本技术涉及铁罐加工的领域,尤其是涉及一种自动制罐生产线的压合结构。
背景技术:
2.铁罐因具有优秀的密封性和保护性而被广泛应用于各种行业的商品包装中。在铁罐的制作过程中,罐身与罐盖通常分开生产,罐身与罐盖加工完成后再组装在一起。而在罐身的加工过程中,需要对前道工序中环绕成型的罐身进行翻边处理,将罐身的开口边缘处进行压合翻边,使开口的边缘弯折。在翻边后,罐身的开口处呈顺滑状,有利于罐盖的多次打开与闭合,进而提升罐盖与罐身的组装效果。
3.压合机构通常包括用于对罐身开口处进行翻边处理的压模,驱动机构驱动压模靠近罐身,通过压模的压制使罐身的开口处内翻或外翻。而在翻边工序中,常需要人工将罐身沿轴线方向竖直放置在压合机的压合区域内,然后由压合机构的压模对罐身的边缘进行翻边。此种人工进行翻边处理的工作效率较低,且人工放置罐身存在安全隐患,难以满足铁罐的大批量生产的需要。
技术实现要素:
4.为了提升罐身翻边处理的效率,本技术提供一种自动制罐生产线的压合结构。
5.本技术提供的一种自动制罐生产线的压合结构采用如下的技术方案:
6.一种自动制罐生产线的压合结构,包括机架,所述机架上设置有承载板,承载板上设置有加工区,沿工件行进方向,加工区包括:进料区、贯穿承载板的压合区和出料区;压合区设置有压合模组,压合模组包括设置于压合区上方的顶模和设置于压合区下方的底模,顶模连接有用于驱动顶模靠近压合区的驱动件,底模连接有用于驱动底模靠近压合区的驱动件;
7.加工区设置有抓取组件,抓取组件包括分设于加工区两侧的抓取板以及驱动两侧抓取板相互靠近或远离的驱动件;抓取板靠近加工区的一侧设置有至少两个用于抓取工件的抓取位;抓取组件连接有用于驱动抓取组件沿工件行进方向往复移动的驱动件,以使对应的抓取位在进料区和压合区之间,或在压合区和出料区之间往复移动。
8.通过采用上述技术方案,使工件可通过与驱动件连接的抓取板将工件传送至压合区内,由压合模组对工件进行压合,并且通过抓取板上设置的若干个抓取位,可在抓取进料区内的工件的同时抓取压合区内压制好的工件。因此,当抓取板将进料区内的工件运送至压合区内进行压合时,压合区内的工件同时被运送至出料区内进行出料。通过此种方式对工件进行翻边处理,无需通过人工将工件摆放至压合区内进行压合,能有效提高工件翻边处理的工作效率,并且能减小工人因放置工件受伤的可能性,以满足铁罐大批量生产的需要。
9.可选的,所述抓取组件还包括用于承载抓取板的驱动件的移动载板,移动载板与机架之间设置有滑移组件。
10.通过采用上述技术方案,滑移组件能使移动载板的滑移过程平稳顺滑。
11.可选的,所述滑移组件包括安装于移动载板的滑块和安装于机架上的滑轨。
12.通过采用上述技术方案,采用滑轨和滑块能减小滑移过程中的摩擦力,使移动载板的滑移过程更加顺滑。
13.可选的,所述压合区进料方向两侧的机架上相对设置有固定板,固定板与机架之间连接有驱动固定板靠近压合区的弹性件,所述弹性件采用弹簧。
14.通过采用上述技术方案,在压合模组对工件压合时,两侧固定板能夹紧工件。在压合后,压合模组远离工件,抓取板松开压合好的工件并向进料区移动,即,抓取板上位于压合区的抓取位向进料区移动以抓取待加工的工件,出料区的抓取位向压合区移动以抓取压合区内压合好的工件。在此过程中工件因被固定板夹紧而留在压合区内,以便于抓取板抓取压合区内的工件送至出料区。
15.可选的,还包括用于向承载板的进料区传送工件的传送带。
16.通过采用上述技术方案,使工件向进料区的运输方便快捷,提高工件的运输效率。
17.可选的,所述传送带包括若干链条、与若干链条相啮合的若干链轮和与链轮连接的电机。
18.工件被传送带传送至进料区后,在被抓取板抓取至压合区前,工件将被阻挡并停留在进料区中以等待抓取板的抓取,此时传送带与工件的底部滑移链接。通过采用上述技术方案,链条的摩擦力相对于普通的传输带摩擦力较小,当链条将工件送至进料区等待抓取板抓取时,链条较小的摩擦力能减小工件磨损的可能性。
19.可选的,所述传送带传送方向的两侧相对设置有限定工件行进路径的限位杆。
20.通过采用上述技术方案,使工件能准确送至承载板的进料区内,便于抓取板进行准确的抓取。
21.可选的,所述限位杆和传送带延伸至承载板的进料区内,承载板上设置有位于进料区内的挡料杆,挡料杆的一端连接有用于驱动挡料杆靠近或远离进料区的驱动件。
22.通过采用上述技术方案,当抓取板抓取工件移动至压合区时,传送带能继续向进料区传送工件,挡料杆能阻挡进料区内的工件继续前进,使工件的留在进料区内的且位置相对固定,以便于对准抓取板的抓取位。
23.可选的,所述限位杆的一侧设置有限料杆,限料杆与挡料杆之间沿工件传送方向的距离大于工件的外径,限料杆的一端连接有用于驱动挡料杆伸入或抽出两侧限位杆之间的驱动件。
24.通过采用上述技术方案,当进料区存在工件时,限料杆插入相邻限位杆之间以阻挡后续的工件向进料区前进,当抓取板将进料区内的工件移送至压合区时,限料杆抽出相邻限位杆之间,使传送带上的工件能传送至进料区;通过限料杆与挡料杆之间的距离大于工件的直径,使得进料区的工件与传送带上的工件存在一定的间隔,以便于在工件进行传输时,挡料杆能准确插入到相邻工件之间的空隙处以阻挡进料区的工件前进。
25.可选的,所述驱动件采用气缸。
26.通过采用上述技术方案,气缸作用快速,易于控制。
27.综上所述,本技术包括以下有益技术效果:
28.1、通过抓取板对工件进行进料与出料能有效提高工件翻边处理的工作效率,并能
减小工人受伤的风险,以满足铁罐大批量生产的需要;
29.2、通过传送带运输工件的方式使工件向进料区的运输方便快捷,提高工件的运输效率。
附图说明
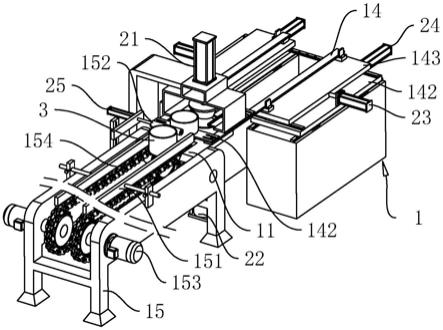
30.图1是本技术的一种自动制罐生产线的压合结构的整体结构示意图。
31.图2是隐藏承载板上方的机架的结构示意图。
32.图3是图2中a处的放大结构示意图。
33.附图标记说明:
34.1、机架;11、承载板;111、挡料杆;12、顶模;121、固定板;1211、弹簧;13、底模;14、抓取板;141、抓取位;142、移动载板;1421、滑块;1422、滑轨;143、连接板;15、传送带;151、限位杆;152、限料杆;153、电机;154、链条;21、第一气缸;22、第二气缸;23、第三气缸;24、第四气缸;25、第五气缸;3、工件。
具体实施方式
35.以下对本技术作进一步详细说明。
36.本实施例公开一种自动制罐生产线的压合结构,参照图1,包括机架1,机架1上设置有承载板11,承载板11上设置有加工区,沿工件行进方向,加工区包括:用于放置待加工工件3的进料区、贯穿承载板的压合区和出料区。压合区设置有压合模组,加工区的两侧设置有抓取板14。进料区远离压合区的一侧设置有传送带15。
37.如图1所示,机架1呈立放长条状。结合图2,机架1的顶部设置有承载板11。承载板11呈长板状,水平设置,长度方向与机架1的长度方向相同。承载板11与机架1可通过螺栓可拆卸固定连接。
38.压合区处设置有压合模组,压合模组包括与工件3上翻边和下翻边相对应的顶模12和底模13。顶模12呈倒置的圆台状,竖直设置,位于承载板11的上方。顶模12连接有驱动件,驱动件采用第一气缸21。第一气缸21的底座与机架1固定连接,活塞杆竖直向下且与顶模12的顶面固定连接。通过第一气缸21以驱动顶模12上下升降。
39.如图2所示,承载板11的下方设置有底模13。底模13呈圆柱状,竖直设置。底模13的顶面设置有环形凹槽。结合图1,底模13的底端同样设置有驱动件,驱动件采用第二气缸22。气缸2的底座与地面固定连接,活塞杆竖直向上且与底模13的底端固定连接。通过第二气缸22以驱动底模13穿过承载板11上下升降。
40.翻边时,顶模12伸入工件3的顶端,底模13的环形凹槽套入工件3的底端。通过顶模12和底模13相配合以对工件3进行翻边处理。
41.如图3所示,压合区进料方向的两侧的机架1上设置有用于夹紧工件3的固定板121。固定板121呈长板状,长度方向与承载板11的长度方向相同。固定板121长度方向远离工件3进料的一侧与机架1之间连接有若干弹簧1211。弹簧1211水平设置,伸缩方向与固定板121长度方向垂直,给予固定板121靠近压合区的作用力。两侧的固定板121通过弹簧1211的弹性以夹紧固定工件3。
42.如图2所示,加工区沿工件行进方向的两侧各设置有一块抓取板14。抓取板14呈长
板状,水平设置,长度方向与承载板11的长度方向相同,且抓取板14位于承载板11的上方。结合图3,抓取板14靠近加工区的侧端开设有若干缺口状的抓取位141,抓取位141呈与工件3的圆周侧壁相匹配的圆弧状,若干抓取位141沿抓取板14长度方向间隔排布。本实施例中,抓取位141设置为三个,分别对应于进料区、压合区和出料区。结合图2,两侧抓取板14与机架1之间各设置有一块移动载板142。抓取板14与移动载板142之间连接有连接板143。连接板143呈长板状,水平设置,长度方向与抓取板14长度方向平行,位于抓取板14的下方,长度方向的一侧与抓取板14固定连接。移动载板142呈长板状,水平设置,长度方向与抓取板14长度方向平行,位于连接板143的下方。
43.连接板143与移动载板142之间设置有驱动件,驱动件采用第三气缸23。第三气缸23的活塞杆方向与连接板143的长度方向垂直,且活塞杆与连接板143长度方向远离抓取板14的一侧固定连接。第三气缸23的底座与移动载板142的顶面固定连接。通过第三气缸23驱动加工区两侧的抓取板14相互靠近或远离。
44.结合图2,连接板143与移动载板142之间设置有滑移组件。滑移组件包括相适配的滑轨和滑块。滑轨与移动载板142的顶面固定连接,滑轨的长度方向与移动载板142的长度方向垂直。滑块与连接板143的底面固定连接。
45.移动载板142长度方向的远离压合模组的一端连接有连接有第四气缸24。第四气缸24的活塞杆方向与移动载板142的长度方向平行。第四气缸24的底座与机架1固定连接,活塞杆与移动载板142长度方向的一端固定连以驱动抓取板14靠近或远离压合模组。
46.移动载板142与机架1之间设置有滑移组件。滑移组件同样包括相适配的滑轨1422和滑块1421。滑轨1422与机架1固定连接,滑轨1422的长度方向与移动载板142的长度方向平行。滑块1421与移动载板142的底面固定连接。
47.通过移动载板142连接的第四气缸24驱动移动载板142和抓取板14靠近进料区的工件3,然后通过抓取板14连接的第三气缸23驱动两侧抓取板14相互靠近,相互靠近的抓取位夹取工件3,再通过移动载板142的第四气缸24驱动抓取板14靠近压合模组以对工件3进行翻边处理。
48.如图1所示,承载板11靠近进料区的一端设置有传送带15。传送带15的运输方向与承载板11的长度方向平行并延伸至承载板11的进料区内。传送带15包括若干链条154、与链条154相啮合的链轮和与链轮连接的电机153。链条154运动长度方向与传送带15方向相同,相邻链条154之间的距离小于工件3的直径。
49.如图1所示,传送带15顶面长度方向的两侧设置有限位杆151。限位杆151呈长杆状,长度方向与传送带15的长度方向相同。两根限位杆151之间的距离仅可容纳一个工件3通过。限位杆151与机架1固定连接。
50.限位杆151的长度方向的一侧设置有限料杆152。限料杆152呈长杆状,长度方向与限位杆151的长度方向垂直。限料杆152长度方向远离限位杆151的一端连接有驱动件。驱动件采用第五气缸25。第五气缸25的活塞杆方向与限料杆152的长度方向相同,与限料杆152长度方向远离限位杆151的一端固定连接。
51.如图2所示,承载板11长度方向靠近进料区的一端的下方设置有挡料杆111。挡料杆111呈长圆杆状,竖直设置。挡料杆111贯穿承载板11,底端连接有第六气缸(图中未显示),第六气缸驱动挡料杆111伸出或沉入承载板11的板面以阻挡或放行工件3。
52.限料杆与挡料杆之间沿工件传送方向的距离大于工件的外径,通过限料杆与挡料杆之间的距离大于工件的直径,使得进料区的工件与传送带上的工件存在一定的间隔,以便于在工件进行传输时,挡料杆能准确插入到相邻工件之间的空隙处以阻挡进料区的工件前进。
53.本实施例的一种自动制罐生产线的压合结构的实施原理为:通过传送带15将工件3传送至承载板11的进料区内。在进料区内暂存有一个工件3时,限料杆152伸入限位杆151之间以阻挡工件3继续前进,同时,挡料杆111伸出承载板11以阻挡进料区内的工件3前进。在抓取板14抓取工件3时,挡料管沉入承载板11,并通过抓取板14上设置的若干个抓取位141,可在抓取进料区内的工件3的同时抓取压合区内压制好的工件3。因此,当抓取板14将进料区内的工件3运送至压合区内进行压合时,压合区内的工件3同时被运送至出料区内进行出料。当进料区工件3被抓取后,限料杆152抽离限位杆151,使下一个罐身传送至进料区内,挡料杆111伸出承载板11的板面阻挡进料区内工件3的前进。通过上述加工方式,能减小工人的受伤风险,提升罐身的翻边处理效率,从而满足铁罐大量生产的需求。
54.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1