一种钢板梁冲压自动化系统的制作方法
1.本实用新型涉及一种冲压自动化系统,具体的说是一种钢板梁线使用的自动化上下料冲压系统,属于汽车制造技术领域。
背景技术:
2.钢板梁生产线上主要的工艺装备是冲压设备,生产时,需要将板料送入冲压设备内的模具上并准确定位,冲压完成后再将板料取取出,汽车纵梁形状为长条状、且规格较多,固定机器人不能满足尺寸需求,地面固定机器人使自动化线排布困难,大梁板料较重,目前单台机器人抓取能力不足,而人工上料不仅时费时费力而且还不安全,定位也不准确,生产效率低,未来随着产业升级,老式生产设备的生产效率已不能满足市场的需求。
技术实现要素:
3.本实用新型所要解决的技术问题是,克服现有技术的缺点,提供一种结构合理、实用方便,安全可靠的钢板梁冲压自动化系统。
4.为了解决以上技术问题,本实用新型提供的一种钢板梁冲压自动化系统,沿物流方向依次包括上料小车、机器人协同拆垛机构、板料移动设备、龙门式机架及出料小车;
5.所述龙门式机架包括在冲压主机前后两侧分别设置的上料侧龙门式机架及下料侧龙门式机架,所述上料侧龙门式机架及下料侧龙门式机架的顶部近冲压主机侧分别倒挂有至少一台六轴机器人,所述六轴机器人在安装于可沿导轨移动的滑动座的伺服电机驱动下沿机架横移,所述上料小车设置于系统的原材料输入口,沿地面铺设的导轨行走,所述板料移动设备设置于上料小车后方,所述机器人协同拆垛机构安装于上料侧龙门式机架上,置于上料小车与板料移动设备上方,所述下料侧龙门式机架的后方设有沿地面导轨移动的出料小车。
6.本实用新型进一步限定的技术方案是:所述上料小车具有两台,沿地面铺设的导轨交替运行。
7.进一步的,所述机器人协同拆垛机构包括横置于上料侧龙门式机架上的安装架,所述安装架上固定安装有通过同步控器控制协同运动的关节式工业机器人。
8.进一步的,所述关节式工业机器人具有两台,对称安装于系统最前端,沿物流中心线的两侧布置。
9.进一步的,所述板料移动设备由板料翻转设备及板料定位设备构成。
10.进一步的,所述板料翻转设备包括固定于地面的支架、梳型翻转叉及用于驱动和连接梳型翻转叉的翻转轴,所述翻转轴通过带座轴承安装于支架上,翻转轴的全长等间距安装有梳型翻转叉,全长上按照一定间距排列,具体间距根据不同的客户需要定制。所述梳型翻转叉同步随翻转轴地转动而翻转。
11.进一步的,所述梳型翻转叉内安装有电磁铁,所述电磁铁的磁力工作面与翻转叉平面平齐。
12.进一步的,所述板料定位设备由无动力滚动支撑机构、伺服推送机构及伺服拍打定位机构组成,所述无动力滚动支撑机构上平面与物流高度等高,伺服推送机构位于无动力滚动支撑机构的中间位置,其安装于直线导轨和滚珠丝杆上的推送杆高出无动力滚动支撑机构上平面,伺服推送机构沿物流方向将工件推至定位点,伺服拍打机构位于无动力滚动支撑机构左右两侧对称布置,其安装于直线导轨和滚珠丝杆上的推送杆高出无动力滚动支撑机构上平面,左右拍打机构左右相对运动对工件在左右方向定位。
13.进一步的,所述出料小车位于下料侧龙门式机架下,沿地面导轨开出冲压线,用于送出下料机器人在其上码垛好的汽车纵梁。
14.进一步的,所述系统的最末端还设有用于把要求抽检的工件送出安全围栏之外进行抽检的抽检台。
15.本实用新型的有益效果是: 本实用新型提供了一种钢板梁冲压自动化系统,改善了工人的工作环境,省时省力,提高生产效率,节约占地空间,降低生产成本,使生产线实现全自动,能够满足需要开展此项工作的市场需求。
附图说明
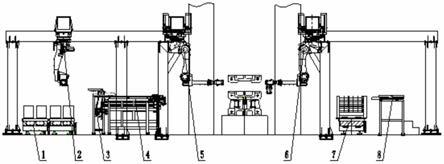
16.图1为本实用新型的结构示意图。
17.图2为本实用新型的俯视图。
18.图3为本实用新型的上料侧龙门机架轴侧示意图。
19.图4为本实用新型的翻转台轴侧图示意图。
20.附图说明:1-上料小车,2-机器人协同拆垛机构,3-翻转机构,4-定位机构,5-上料侧龙门式机架,6-下料侧龙门式机架、7-出料小车、8-抽检台,9-支架,10-翻转轴,11-梳型翻转叉。
具体实施方式
21.实施例
22.本实施例提供的一种钢板梁冲压自动化系统,结构如图所示:沿物流方向依次包括上料小车、机器人协同拆垛机构、板料移动设备、龙门式机架及出料小车。
23.其中,上料小车为自动化生产系统的原材料输入口,共有两台,沿地面铺设的导轨行走,用于将成垛的钢梁板料送入自动化指定位置。
24.龙门式机架包括在冲压主机前后两侧分别设置的上料侧龙门式机架及下料侧龙门式机架,上料侧龙门式机架及下料侧龙门式机架的顶部近冲压主机侧分别倒挂有三台六轴机器人,每台六轴机器人在安装于可沿导轨移动的滑动座的伺服电机驱动下沿机架横移。
25.板料移动设备设置于上料小车后方,由板料翻转设备及板料定位设备构成。板料翻转设备包括固定于地面的支架、梳型翻转叉及用于驱动和连接梳型翻转叉的翻转轴,所述翻转轴通过带座轴承安装于支架上,翻转轴的全长等间距安装有梳型翻转叉,全长上按照一定间距排列,具体间距根据不同的客户需要定制。所述梳型翻转叉同步随翻转轴地转动而翻转。梳型翻转叉内安装有电磁铁,所述电磁铁的磁力工作面与翻转叉平面平齐。
26.板料定位设备由无动力滚动支撑机构、伺服推送机构及伺服拍打定位机构组成,
用于将前级输送过来的板料进行精确定位。所述无动力滚动支撑机构上平面与物流高度等高,伺服推送机构位于无动力滚动支撑机构的中间位置,其安装于直线导轨和滚珠丝杆上的推送杆高出无动力滚动支撑机构上平面,伺服推送机构沿物流方向将工件推至定位点,伺服拍打机构位于无动力滚动支撑机构左右两侧对称布置,其安装于直线导轨和滚珠丝杆上的推送杆高出无动力滚动支撑机构上平面,左右拍打机构左右相对运动对工件在左右方向定位。
27.机器人协同拆垛机构安装于上料侧龙门式机架上,置于上料小车与板料移动设备上方,机器人协同拆垛机构包括横置于上料侧龙门式机架上的安装架,所述安装架上倒挂的固定安装有通过同步控器控制协同运动的两台关节式工业机器人。
28.下料侧龙门式机架的后方设有沿地面导轨移动的出料小车,沿地面导轨开出冲压线,用于送出下料机器人在其上码垛好的汽车纵梁。
29.抽检台位于自动化系统最末端,用于把自动化系统要求送出抽检的工件送出安全围栏之外进行抽检。
30.工件按照工艺顺序经过下述工艺设备,从而完成生产过程,工艺设备按顺序包括:
31.两台上料小车1,两台小车交替运行,可避免换料垛时生产间断;
32.机器人协同拆垛系统2,两台机器人协同将板料从料垛上抓起放到翻转台或定位台;
33.翻转台3,可以将需要进行翻面的板料翻转后放到定外台上。
34.定位台4,讲工件向后推送,在定位台末端由拍打机构和推送机构同时实现左右和前后方向的定位;
35.上料侧龙门式机架5,其上可平移的三台六轴机器人同步工作,将工件从定位台抓起放入压机冲压;
36.下料侧龙门式机架6,其上可平移的三台六轴机器人同步工作,将工件从压机内抓起放到出料小车上并精准码垛;
37.出料小车7,码垛满车后,小车开出工作区域,空车开进工作区域,实现工件的出处。
38.抽检台8,需要抽检的工件,由下料龙门式机架6上的机器人抓取并放到抽检台上,送出围栏外进行检验。
39.除上述实施例外,本实用新型还可以有其他实施方式。凡采用等同替换或等效变换形成的技术方案,均落在本实用新型要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1