一种数控车床弹簧夹头夹紧机构的制作方法
1.本实用新型属于数控机床技术领域,更具体地说,特别涉及一种数控车床弹簧夹头夹紧机构。
背景技术:
2.弹簧夹头是一种用来装置在铣床上的一种用来禁锢钻头或者是铣刀的一种筒形的夹具,现有装置一般为套筒结构,不能便捷对弹簧夹头曲侧面的间距进行大幅度调节。
3.如公开号为:cn213164176u的专利中,公开了一种数控车床弹簧夹头夹紧机构,包括安装座,所述安装座的一侧外表面设置有可快速拆装固定机构,所述可快速拆装固定机构包括固定块、调节块、螺纹杆、连接柱与预留孔,所述可快速拆装固定机构的一侧外表面设置有伸缩杆,所述伸缩杆的一侧设置有定位杆,所述定位杆的下端设置有抗震降噪机构,所述抗震降噪机构包括橡胶垫、吸音棉、减震柱,所述定位杆的一侧外表面设置有弹簧,所述弹簧的一侧外表面设置有弹簧套,本实用新型所述的一种数控车床弹簧夹头夹紧机构,夹紧力度大,防滑性能优异,在长时间使用后,夹紧机构也不会出现松动的情况,有效的减少了次品的产生,带来更好的使用前景。
4.基于上述,传统的数控车床弹簧夹头夹紧机构主要为套筒结构,一般未设置可以便捷地对弹簧夹头外曲侧面的间距进行大幅度调节的结构,使用方法较为繁琐,一般不能对弹簧夹头外侧前后左右四种水平方向进行同步夹紧的结构,结构稳定性较差。
技术实现要素:
5.为了解决上述技术问题,本实用新型提供一种数控车床弹簧夹头夹紧机构,以解决传统的数控车床弹簧夹头夹紧机构主要为套筒结构,一般未设置可以便捷地对弹簧夹头外曲侧面的间距进行大幅度调节的结构,使用方法较为繁琐,一般不能对弹簧夹头外侧前后左右四种水平方向进行同步夹紧的结构,结构稳定性较差的问题。
6.本实用新型一种数控车床弹簧夹头夹紧机构的目的与功效,由以下具体技术手段所达成:
7.一种数控车床弹簧夹头夹紧机构,包括中骨架和传动机构;
8.所述中骨架内部设置有承接结构;
9.所述承接结构包括上弯折座,承接齿轮a和顶滑杆,上弯折座数量设置为四组,上弯折座为“l”型结构,上弯折座固定连接于中骨架前后端顶部,承接齿轮a数量设置为四组,承接齿轮a通过铰连接设置于四组上弯折座相对内侧;顶滑杆数量设置为二组,顶滑杆固定连接于上弯折座顶部底面处;
10.所述中骨架顶部设置有左右夹紧结构;
11.所述中骨架底部设置有前后夹紧结构。
12.进一步的,所述承接结构还包括:
13.下弯折座,其数量设置为四组,其固定连接于中骨架左右两侧底部;
14.承接齿轮b,其数量设置为四组,其通过铰连接设置于四组下弯折座相对内侧;
15.底滑杆,其数量设置为二组,其固定连接于下弯折座顶部。
16.进一步的,所述承接结构还包括:
17.中铰架,其数量设置为四组,其固定连接于中骨架前后左右侧立面处中部;
18.下铰座,其数量设置为二组,其固定连接于中骨架左右两侧立面处,其末端向下弯折;
19.上铰座,其数量设置为二组,其固定连接于中骨架前后两侧立面处,其末端向上弯折。
20.进一步的,所述承接结构还包括:
21.中锥齿轮,中锥齿轮数量设置为二组,其通过铰连接设置于中铰架内部;
22.传动齿轮,其通过同轴连接设置于中锥齿轮内侧。
23.进一步的,所述左右夹紧结构包括:顶固架,其固定连接于中骨架顶部左侧;左弧架,左弧架固定连接于顶固架右侧;活动架a,其通过滑动连接于左弧架右侧;弧形槽a,其数量设置为二组,其固定连接于活动架a顶部;限位齿条a,其数量设置为二组,其固定连接于活动架a前后端,其位于弧形槽a底部;右弧架,右弧架固定连接于活动架a左侧。
24.进一步的,所述前后夹紧结构包括:
25.底固架,其固定连接于中骨架底部;
26.后弧架,后弧架固定连接于底固架前侧;
27.底长锥齿轮杆,其通过铰连接设置于底固架后端,其左右两端同轴连接有两组锥齿轮;
28.活动架b,其通过滑动连接设置于底固架前侧;
29.弧形槽b,其数量设置为二组,其固定连接于活动架b顶部;
30.限位齿条b,其数量设置为二组,其固定连接于活动架b左右两端;
31.前弧架,其固定连接于活动架b后侧。
32.进一步的,所述传动机构包括:
33.前后锥齿轮杆,其数量设置为二组,其通过铰连接设置于下铰座内部,其前后两端同轴连接有两组锥齿轮;
34.链条齿轮a,其通过同轴连接设置于左侧一组前后锥齿轮杆外曲侧面。
35.进一步的,所述传动机构还包括:
36.顶锥齿轮杆,其数量设置为二组,其通过铰连接设置于上铰座内部,其左右两端同轴连接有两组锥齿轮;
37.左锥齿轮杆,其通过铰连接设置于顶固架左侧,其前后两端同轴连接有两组锥齿轮;
38.链条齿轮b,其通过同轴连接设置于左锥齿轮杆内部,其通过链条与链条齿轮a相传动;三相异步电机,其固定连接于中骨架后端左侧,其转轴处同轴连接有锥齿轮,其锥齿轮与左锥齿轮杆前端锥齿轮相啮合。
39.本实用新型至少包括以下有益效果:
40.1、本实用新型通过设置左右夹紧结构,通过其与前后夹紧结构配合,通过控制三相异步电机运转,当控制三相异步电机转轴顺时针转动时,可以使其转轴末端的锥齿轮啮
合带动其前侧啮合的左锥齿轮杆进行逆时针转动,通过左锥齿轮杆前后端锥齿轮可以带动啮合的两组顶锥齿轮杆进行顺时针转动,可以使顶锥齿轮杆右端锥齿轮啮合的中锥齿轮进行逆时针转动,从而可以使中锥齿轮内侧端同轴的两组传动齿轮带动其顶部啮合的限位齿条a向左侧平移,从而可以使活动架a向右侧滑动,左锥齿轮杆逆时针转动的同时,通过与其同轴的链条齿轮b配合链条传动可以使链条齿轮a进行逆时针转动,从而可以带动与链条齿轮a同轴的位于中骨架左侧的一组前后锥齿轮杆进行逆时针转动,通过左侧的一组前后锥齿轮杆后端的锥齿轮啮合传动,可以使其后端右侧啮合的底长锥齿轮杆进行顺时针转动,可以利用底长锥齿轮杆右端锥齿轮带动其右侧前端啮合的右侧一组前后锥齿轮杆进行逆时针转动,通过两组前后锥齿轮杆同步进行逆时针转动,可以使其前端锥齿轮啮合的位于中骨架左右两侧的中锥齿轮进行顺时针转动,可以使其同轴的传动齿轮带动其顶部啮合的限位齿条b向前侧平移,从而可以使活动架b向前侧平移,从而可以使三相异步电机同步调控前后左右方向的弧形座间距,可以对弹簧夹头进行水平方向的同步固定,结构更为稳定。
41.2、本实用新型通过设置传动机构结构,通过控制三相异步电机装置进行逆时针转动,可以使左弧架与右弧架间距收缩的同时,控制前弧架与后弧架前后间距进行同步收缩,可以对弹簧夹头进行前后左右水平方向的同步夹紧,通过控制一组三相异步电机,可以便捷地对弹簧夹头外曲侧面的间距进行大幅度调节,便于使用。
附图说明
42.图1是本实用新型整体的俯视立体结构示意图。
43.图2是本实用新型整体的立体拆解结构示意图。
44.图3是本实用新型中中骨架的立体结构示意图。
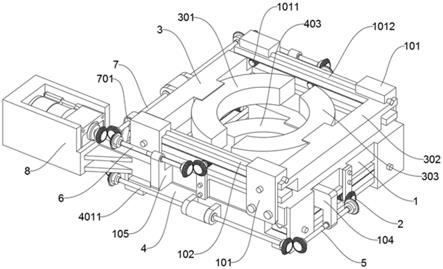
45.图4是本实用新型整体的仰视立体结构示意图。
46.图中,部件名称与附图编号的对应关系为:
47.1、中骨架;
48.101、上弯折座;1011、承接齿轮a;1012、顶滑杆;102、下弯折座;1021、承接齿轮b;1022、底滑杆;103、中铰架;104、下铰座;105、上铰座;
49.2、中锥齿轮;
50.201、传动齿轮;
51.3、顶固架;301、左弧架;302、活动架a;3021、弧形槽a;3022、限位齿条a;303、右弧架;
52.4、底固架;
53.401、后弧架;4011、底长锥齿轮杆;402、活动架b;4021、弧形槽b;4022、限位齿条b;403、前弧架;
54.5、前后锥齿轮杆;
55.501、链条齿轮a;
56.6、顶锥齿轮杆;
57.7、左锥齿轮杆;
58.701、链条齿轮b;
59.8、三相异步电机。
具体实施方式
60.下面结合附图和实施例对本实用新型的实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不能用来限制本实用新型的范围。
61.在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“同轴”、“底部”、“一端”、“顶部”、“中部”、“另一端”、“上”、“一侧”、“顶部”、“内”、“前部”、“中央”、“两端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
62.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置”、“连接”、“固定”、“旋接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
63.实施例:
64.如附图1至附图4所示:本实用新型提供一种数控车床弹簧夹头夹紧机构,包括中骨架1和传动机构;中骨架1内部设置有承接结构;承接结构包括上弯折座101,承接齿轮a1011和顶滑杆1012,上弯折座101数量设置为四组,上弯折座101为“l”型结构,上弯折座101固定连接于中骨架1前后端顶部,承接齿轮a1011数量设置为四组,承接齿轮a1011通过铰连接设置于四组上弯折座101相对内侧;顶滑杆1012数量设置为二组,顶滑杆1012固定连接于上弯折座101顶部底面处;中骨架1顶部设置有左右夹紧结构;中骨架1底部设置有前后夹紧结构。
65.如图3所示,承接结构还包括:下弯折座102,其数量设置为四组,其固定连接于中骨架1左右两侧底部;承接齿轮b1021,其数量设置为四组,其通过铰连接设置于四组下弯折座102相对内侧;底滑杆1022,其数量设置为二组,其固定连接于下弯折座102顶部;中铰架103,其数量设置为四组,其固定连接于中骨架1前后左右侧立面处中部;下铰座104,其数量设置为二组,其固定连接于中骨架1左右两侧立面处,其末端向下弯折;上铰座105,其数量设置为二组,其固定连接于中骨架1前后两侧立面处,其末端向上弯折;中锥齿轮2,中锥齿轮2数量设置为二组,其通过铰连接设置于中铰架103内部;传动齿轮201,其通过同轴连接设置于中锥齿轮2内侧。
66.如图2所示,左右夹紧结构包括:顶固架3,其固定连接于中骨架1顶部左侧;左弧架301,左弧架301固定连接于顶固架3右侧;活动架a302,其通过滑动连接于左弧架301右侧;弧形槽a3021,其数量设置为二组,其固定连接于活动架a302顶部;限位齿条a3022,其数量设置为二组,其固定连接于活动架a302前后端,其位于弧形槽a3021底部;右弧架303,右弧架303固定连接于活动架a302左侧,通过弧形槽a3021与顶滑杆1012配合滑动,可以对活动架a302进行水平滑动方向限定,通过承接齿轮a1011与限位齿条a3022配合,可以对活动架a302垂直高度进行限定。
67.如图2所示,前后夹紧结构包括:底固架4,其固定连接于中骨架1底部;后弧架401,
后弧架401固定连接于底固架4前侧;底长锥齿轮杆4011,其通过铰连接设置于底固架4后端,其左右两端同轴连接有两组锥齿轮;活动架b402,其通过滑动连接设置于底固架4前侧;弧形槽b4021,其数量设置为二组,其固定连接于活动架b402顶部;限位齿条b4022,其数量设置为二组,其固定连接于活动架b402左右两端;前弧架403,其固定连接于活动架b402后侧,通过控制三相异步电机8带动左锥齿轮杆7逆时针转动的同时,通过与其同轴的链条齿轮b701配合链条传动可以使链条齿轮a501进行逆时针转动,从而可以带动与链条齿轮a501同轴的位于中骨架1左侧的一组前后锥齿轮杆5进行逆时针转动,通过左侧的一组前后锥齿轮杆5后端的锥齿轮啮合传动,可以使其后端右侧啮合的底长锥齿轮杆4011进行顺时针转动,可以利用底长锥齿轮杆4011右端锥齿轮带动其右侧前端啮合的右侧一组前后锥齿轮杆5进行逆时针转动,通过两组前后锥齿轮杆5同步进行逆时针转动,可以使其前端锥齿轮啮合的位于中骨架1左右两侧的中锥齿轮2进行顺时针转动,可以使其同轴的传动齿轮201带动其顶部啮合的4022限位齿条b向前侧平移,从而可以使活动架b402向前侧平移可以对弹簧夹头进行前后侧方向的夹紧。
68.如图1所示,传动机构包括:前后锥齿轮杆5,其数量设置为二组,其通过铰连接设置于下铰座104内部,其前后两端同轴连接有两组锥齿轮,其前端两组锥齿轮与底长锥齿轮杆4011左右两端的锥齿轮相啮合;链条齿轮a501,其通过同轴连接设置于左侧一组前后锥齿轮杆5外曲侧面;顶锥齿轮杆6,其数量设置为二组,其通过铰连接设置于上铰座105内部,其左右两端同轴连接有两组锥齿轮,顶锥齿轮杆6右端锥齿轮与中骨架1前后侧两组中锥齿轮2相啮合;左锥齿轮杆7,其通过铰连接设置于顶固架3左侧,其前后两端同轴连接有两组锥齿轮,其前后端锥齿轮分别于前后两组顶锥齿轮杆6左端锥齿轮相啮合;链条齿轮b701,其通过同轴连接设置于左锥齿轮杆7内部,其通过链条与链条齿轮a501相传动;三相异步电机8,其固定连接于中骨架1后端左侧,其转轴处同轴连接有锥齿轮,其锥齿轮与左锥齿轮杆7前端锥齿轮相啮合,通过控制三相异步电机8运转,当控制三相异步电机8转轴顺时针转动时,可以使其转轴末端的锥齿轮啮合带动其前侧啮合的左锥齿轮杆7进行逆时针转动,通过左锥齿轮杆7前后端锥齿轮可以带动啮合的两组顶锥齿轮杆6进行顺时针转动,可以使顶锥齿轮杆6右端锥齿轮啮合的中锥齿轮2进行逆时针转动,从而可以使中锥齿轮2内侧端同轴的两组传动齿轮201带动其顶部啮合的限位齿条a3022向左侧平移,从而可以使活动架a302向右侧滑动,左锥齿轮杆7逆时针转动的同时,通过与其同轴的链条齿轮b701配合链条传动可以使链条齿轮a501进行逆时针转动,从而可以带动与链条齿轮a501同轴的位于中骨架1左侧的一组前后锥齿轮杆5进行逆时针转动,通过左侧的一组前后锥齿轮杆5后端的锥齿轮啮合传动,可以使其后端右侧啮合的底长锥齿轮杆4011进行顺时针转动,可以利用底长锥齿轮杆4011右端锥齿轮带动其右侧前端啮合的右侧一组前后锥齿轮杆5进行逆时针转动,通过两组前后锥齿轮杆5同步进行逆时针转动,可以使其前端锥齿轮啮合的位于中骨架1左右两侧的中锥齿轮2进行顺时针转动,可以使其同轴的传动齿轮201带动其顶部啮合的4022限位齿条b向前侧平移,从而可以使活动架b402向前侧平移,从而可以使三相异步电机8同步调控前后左右方向的弧形座间距,可以对弹簧夹头进行x轴与y轴的同步固定。
69.本实施例的具体使用方式与作用:
70.本实用新型中,在使用时,通过控制三相异步电机8运转,当控制三相异步电机8转轴顺时针转动时,可以使其转轴末端的锥齿轮啮合带动其前侧啮合的左锥齿轮杆7进行逆
时针转动,通过左锥齿轮杆7前后端锥齿轮可以带动啮合的两组顶锥齿轮杆6进行顺时针转动,可以使顶锥齿轮杆6右端锥齿轮啮合的中锥齿轮2进行逆时针转动,从而可以使中锥齿轮2内侧端同轴的两组传动齿轮201带动其顶部啮合的限位齿条a3022向左侧平移,从而可以使活动架a302向右侧滑动,左锥齿轮杆7逆时针转动的同时,通过与其同轴的链条齿轮b701配合链条传动可以使链条齿轮a501进行逆时针转动,从而可以带动与链条齿轮a501同轴的位于中骨架1左侧的一组前后锥齿轮杆5进行逆时针转动,通过左侧的一组前后锥齿轮杆5后端的锥齿轮啮合传动,可以使其后端右侧啮合的底长锥齿轮杆4011进行顺时针转动,可以利用底长锥齿轮杆4011右端锥齿轮带动其右侧前端啮合的右侧一组前后锥齿轮杆5进行逆时针转动,通过两组前后锥齿轮杆5同步进行逆时针转动,可以使其前端锥齿轮啮合的位于中骨架1左右两侧的中锥齿轮2进行顺时针转动,可以使其同轴的传动齿轮201带动其顶部啮合的4022限位齿条b向前侧平移,从而可以使活动架b402向前侧平移,从而可以使三相异步电机8同步调控前后左右方向的弧形座间距进行扩大,将弹簧夹头放置在中骨架1内侧,使其曲侧面位于左弧架301和右弧架303中间后,通过控制三相异步电机8装置进行逆时针转动,可以使左弧架301与右弧架303间距收缩的同时,控制前弧架403与后弧架401前后间距进行同步收缩,可以对弹簧夹头进行前后左右水平方向的同步夹紧。
71.本实用新型未详述之处,均为本领域技术人员的公知技术。
72.本实用新型的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本实用新型限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本实用新型的原理和实际应用,并且使本领域的普通技术人员能够理解本实用新型从而设计适于特定用途的带有各种修改的各种实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1