一种U形扶手激光焊接工装的制作方法
一种u形扶手激光焊接工装
技术领域
1.本实用新型属于扶手领域,特别涉及一种u形扶手激光焊接工装。
背景技术:
2.扶手是通常设置在楼梯、栏板、阳台等处的兼具实用和装饰的凸起物,是栏杆或栏板上沿供人手扶的构件,作行走时依扶之用,材料多为木制,也有金属、塑料、水磨石、大理石等,要求安全、坚牢、美观、表面光滑无 尖锐棱角,其中u型扶手是一种使用范围非常广的扶手造型。
3.在现有技术中,u型扶手在生产过程中,通常需要使用激光焊接的方式对u型扶手进行焊接工作,且在焊接过程中,通常需要使用焊接工装对扶手进行固定工作,而现有技术中的焊接工装通常只能起到简单固定的作用,因此在需要更换焊接位置时,通常需要更换焊接设备或焊接工装的位置,因此极大程度的影响了焊接效率,从而影响扶手的生产效率,而且人工调整焊接位置,容易导致焊接位置偏移,影响焊接精度。
技术实现要素:
4.针对背景技术中提到的问题,本实用新型的目的是提供一种u形扶手激光焊接工装,以解决现有技术中的焊接工装在调整焊接位置时非常不便,且容易影响焊接精度的问题。
5.本实用新型的上述技术目的是通过以下技术方案得以实现的:
6.一种u形扶手激光焊接工装,包括底板,所述底板上端的外侧设置有滑动组件,所述底板的上端通过滑动组件滑动连接有支板,所述底板上端的左侧设置有移动组件,所述移动组件与支板传动连接,所述底板背面的左侧设置有第一定位组件,所述第一定位组件与支板的背面活动连接,所述底板的上端右侧设置有第二定位组件,所述第二定位组件与支板活动连接,所述支板的上端右侧设置有夹持机构,所述支板的上端右侧通过夹持机构活动连接有扶手本体,所述支板的上端左侧设置有第一定位块,所述第一定位块与扶手本体贴合连接,所述支板的上端右侧设置有第二定位块,所述第二定位块与扶手本体贴合连接,所述扶手本体与第二定位组件活动连接。
7.通过采用上述技术方案,在需要对扶手本体进行焊接工作时,将扶手本体放置在支板的上端右侧,并使扶手分别与第一定位块、第二定位块贴合连接,然后通过夹持机构固定扶手本体的位置即可,在需要更换焊接位置时,通过移动组件即可带动支板移动,并通过滑动组件稳固支板的位置,即可使支板通过夹持机构带动扶手本体移动,并通过第一定位组件或第二定位组件稳固支板的位置,使支板的移动位置更加精确,进而可达到调整焊接位置的作用,使焊接位置在调整时更加方便、快捷,同时通过自动调整焊接位置,可极大程度的提升焊接精度,避免人工调整影响焊接位置,影响焊接精度。
8.进一步地,作为优选技术方案,所述滑动组件包括滑轨与滑块,所述滑轨固定安装在底板的上端外侧,所述滑块固定连接在支板的下端,所述滑块与滑轨滑动连接。
9.通过采用上述技术方案,通过滑块与滑轨滑动连接,使移动机构在带动支板移动时,通过滑动组件可起到稳固支板位置的作用。
10.进一步地,作为优选技术方案,所述移动组件包括滑槽、移动气缸与固定块,所述滑槽开设在底板的上端左侧,所述移动气缸固定安装在滑槽的内部,所述固定块固定连接在支板的下端左侧,所述移动气缸的输出端与固定块固定连接,所述固定块的下端滑动连接在滑槽的内部。
11.通过采用上述技术方案,通过移动气缸可带动固定块在滑槽的内部移动,从而通过固定块的移动即可带动支板移动,进而使移动组件可达到移动扶手本体的作用。
12.进一步地,作为优选技术方案,所述第一定位组件包括第一安装块与第一垫块,所述第一安装块固定安装在底板背面的左侧,所述第一垫块固定安装在第一安装块的正面,所述第一垫块与支板活动连接。
13.通过采用上述技术方案,通过第一垫块与支板活动连接,并通过第一安装块支撑第一垫块的位置,从而使第一安装块可起到对支板的背面进行定位的作用,避免支板移动过多影响焊接位置。
14.进一步地,作为优选技术方案,所述第二定位组件包括第二安装块与第二垫块,所述第二安装块固定连接在底板上端的右侧,所述支板的上端右侧开设有开口,所述第二安装块插接在开口的内部,所述第二定位块滑动连接在开口的内部,所述第二垫块固定安装在第二安装块的背面,所述第二垫块与扶手本体活动连接。
15.通过采用上述技术方案,通过第二垫块与扶手本体活动连接,并通过第二安装块稳固第二垫块的位置,且通过第二安装块滑动连接在开口的内部,避免第二安装块影响支板移动,即可使第二垫块可起到支撑扶手本体位置的作用,避免支板移动过多影响焊接位置。
16.进一步地,作为优选技术方案,所述夹持机构包括夹持气缸、第一夹块与第二夹块,所述夹持气缸固定安装在支板上端的前侧,所述第一夹块固定连接在夹持气缸的输出端,所述第一夹块的背面与扶手本体贴合连接,所述第二夹块固定安装在支板上端的后侧,所述第二夹块的正面与扶手本体贴合连接。
17.通过采用上述技术方案,通过夹持气缸带动第一夹块移动,使第一夹块与扶手本体的正面贴合连接,并通过第一夹块的推动使扶手本体与第二夹块贴合连接,从而可将扶手本体夹持在第一夹块与第二夹块之间,进而使夹持机构达到固定扶手本体位置的作用。
18.综上所述,本实用新型主要具有以下有益效果:
19.第一、在需要对扶手本体进行焊接工作时,将扶手本体放置在支板的上端右侧,并使扶手分别与第一定位块、第二定位块贴合连接,然后通过夹持机构固定扶手本体的位置即可,在需要更换焊接位置时,通过移动组件即可带动支板移动,并通过滑动组件稳固支板的位置,即可使支板通过夹持机构带动扶手本体移动,并通过第一定位组件或第二定位组件稳固支板的位置,使支板的移动位置更加精确,进而可达到调整焊接位置的作用,使焊接位置在调整时更加方便、快捷,同时通过自动调整焊接位置,可极大程度的提升焊接精度,避免人工调整影响焊接位置,影响焊接精度;
20.第二、通过移动气缸可带动固定块在滑槽的内部移动,从而通过固定块的移动即可带动支板移动,进而使移动组件可达到移动扶手本体的作用,并通过滑动组件稳固支板
的位置,即可达到调整扶手本体焊接位置的作用,并通过第一定位块与第二定位块可起到对支板进行定位的作用,避免支板移动过多影响焊接位置,达到精准移动扶手本体的作用,从而提升焊接精度。
附图说明
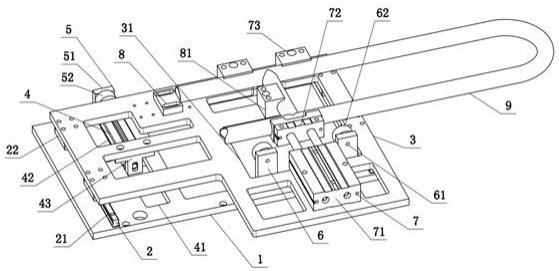
21.图1是本实用新型的结构示意图;
22.图2是本实用新型的俯视图;
23.图3是本实用新型的左视图;
24.图4是本实用新型的主视图。
25.附图标记:1、底板,2、滑动组件,21、滑轨,22、滑块,3、支板,31、开口,4、移动组件,41、滑槽,42、移动气缸,43、固定块,5、第一定位组件,51、第一安装块,52、第一垫块,6、第二定位组件,61、第二安装块,62、第二垫块,7、夹持机构,71、夹持气缸,72、第一夹块,73、第二夹块,8、第一定位块,81、第二定位块,9、扶手本体。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.实施例1
28.参考图1-4,本实施例所述的一种u形扶手激光焊接工装,包括底板1,底板1上端的外侧设置有滑动组件2,底板1的上端通过滑动组件2滑动连接有支板3,底板1上端的左侧设置有移动组件4,移动组件4与支板3传动连接,底板1背面的左侧设置有第一定位组件5,第一定位组件5与支板3的背面活动连接,底板1的上端右侧设置有第二定位组件6,第二定位组件6与支板3活动连接,支板3的上端右侧设置有夹持机构7,支板3的上端右侧通过夹持机构7活动连接有扶手本体9,支板3的上端左侧设置有第一定位块8,第一定位块8与扶手本体9贴合连接,支板3的上端右侧设置有第二定位块81,第二定位块81与扶手本体9贴合连接,扶手本体9与第二定位组件6活动连接;在需要对扶手本体9进行焊接工作时,将扶手本体9放置在支板3的上端右侧,并使扶手分别与第一定位块8、第二定位块81贴合连接,然后通过夹持机构7固定扶手本体9的位置即可,在需要更换焊接位置时,通过移动组件4即可带动支板3移动,并通过滑动组件2稳固支板3的位置,即可使支板3通过夹持机构7带动扶手本体9移动,并通过第一定位组件5或第二定位组件6稳固支板3的位置,使支板3的移动位置更加精确,进而可达到调整焊接位置的作用。
29.实施例2
30.参考图4,在实施例1的基础上,为了达到稳固支板3位置的目的,本实施例对滑动组件2进行了创新设计,具体地,滑动组件2包括滑轨21与滑块22,滑轨21固定安装在底板1的上端外侧,滑块22固定连接在支板3的下端,滑块22与滑轨21滑动连接;通过滑块22与滑轨21滑动连接,使移动机构在带动支板3移动时,通过滑动组件2可起到稳固支板3位置的作用。
31.参考图2-3,为了达到移动扶手本体9的目的,本实施例的移动组件4包括滑槽41、移动气缸42与固定块43,滑槽41开设在底板1的上端左侧,移动气缸42固定安装在滑槽41的内部,固定块43固定连接在支板3的下端左侧,移动气缸42的输出端与固定块43固定连接,固定块43的下端滑动连接在滑槽41的内部;通过移动气缸42可带动固定块43在滑槽41的内部移动,从而通过固定块43的移动即可带动支板3移动,进而使移动组件4可达到移动扶手本体9的作用。
32.参考图2,为了达到对支板3的背面进行定位的目的,本实施例的第一定位组件5包括第一安装块51与第一垫块52,第一安装块51固定安装在底板1背面的左侧,第一垫块52固定安装在第一安装块51的正面,第一垫块52与支板3活动连接;通过第一垫块52与支板3活动连接,并通过第一安装块51支撑第一垫块52的位置,从而使第一安装块51可起到对支板3的背面进行定位的作用,避免支板3移动过多影响焊接位置。
33.参考图2,为了达到支撑扶手本体9的目的,本实施例的第二定位组件6包括第二安装块61与第二垫块62,第二安装块61固定连接在底板1上端的右侧,支板3的上端右侧开设有开口31,第二安装块61插接在开口31的内部,第二定位块81滑动连接在开口31的内部,第二垫块62固定安装在第二安装块61的背面,第二垫块62与扶手本体9活动连接;通过第二垫块62与扶手本体9活动连接,并通过第二安装块61稳固第二垫块62的位置,且通过第二安装块61滑动连接在开口31的内部,避免第二安装块61影响支板3移动,即可使第二垫块62可起到支撑扶手本体9位置的作用,避免支板3移动过多影响焊接位置。
34.实施例3
35.参考图1,本实施例在实施例2的基础上,为了达到固定扶手本体9位置的目的,本实施例对夹持机构7进行了创新设计,具体地,夹持机构7包括夹持气缸71、第一夹块72与第二夹块73,夹持气缸71固定安装在支板3上端的前侧,第一夹块72固定连接在夹持气缸71的输出端,第一夹块72的背面与扶手本体9贴合连接,第二夹块73固定安装在支板3上端的后侧,第二夹块73的正面与扶手本体9贴合连接;通过夹持气缸71带动第一夹块72移动,使第一夹块72与扶手本体9的正面贴合连接,并通过第一夹块72的推动使扶手本体9与第二夹块73贴合连接,从而可将扶手本体9夹持在第一夹块72与第二夹块73之间,进而使夹持机构7达到固定扶手本体9位置的作用。
36.使用原理及优点:底板1通过滑动组件2可起到支撑支板3位置的作用,在需要进行扶手本体9的焊接工作时,将扶手本体9放置在支板3的上端,并使扶手分别与第一定位块8、第二定位块81贴合连接,然后通过夹持气缸71带动第一夹块72移动,使第一夹块72与扶手本体9的正面贴合连接,并通过第一夹块72的推动使扶手本体9与第二夹块73贴合连接,从而可将扶手本体9夹持在第一夹块72与第二夹块73之间,进而通过夹持机构7固定扶手本体9的位置,即可进行焊接工作,在需要调整焊接位置时,通过移动气缸42带动固定块43在滑槽41的内部滑动,使移动组件4达到移动支板3的作用,并通过滑块22与滑轨21滑动连接,使滑动组件2稳固支板3的位置,从而可带动扶手本体9移动,并通过第一垫块52与支板3活动连接,并通过第一安装块51支撑第一垫块52的位置,从而使第一定位组件5可起到对支板3的背面进行定位的作用,通过第二垫块62与扶手本体9活动连接,并通过第二安装块61稳固第二垫块62的位置,且通过第二安装块61滑动连接在开口31的内部,避免第二安装块61影响支板3移动,即可使第二定位组件6可起到支撑扶手本体9位置的作用,从而避免支板3移
动过多影响焊接位置,使支板3的移动位置更加精准,避免人工移动影响焊接位置,从而提升焊机精度,同时,使焊接位置在调整时更加方便、快捷。
37.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1