双工位智能行走焊接装置的制作方法
1.本实用新型涉及自动化焊接设备制造技术领域,具体的说是一种焊接效率高、行走稳定的双工位智能行走焊接装置。
背景技术:
2.由于焊接设备在自动化焊接过程中需要等待工件转移、固定,在工件未固定好之前,若焊机处于待机状态,会导致焊机利用效率低,为了解决该问题,通过设置可转动的工件固定支架,来完成工料的不间断上料,从而保证焊机的焊接效率。但现阶段在焊接过程中除了需要对多工位上的工件进行焊接,焊机还需要兼顾不同形状工件的焊接需求,保证焊机能够满足异形工件的处理需要,现有的角度调整式或翻转式工位调整装置对于大工件或异形工件的处理,存在旋转或翻转影响固定稳定性、调整灵活度差等问题。
技术实现要素:
3.本实用新型针对现有技术中存在的不足,提出了一种结构合理、工件固定稳定、焊接位置调整灵活,能够显著提高焊接效率的双工位智能行走焊接装置。
4.本实用新型可以通过以下措施达到:
5.一种双工位智能行走焊接装置,其特征在于,设有直线行走梁、焊接底座、直线行走机构,所述焊接底座经直线行走机构连接在直线行走梁上,所述直线行走机构中设有沿行走梁长度方向设置的齿条、与齿条啮合的行走齿轮、用于驱动行走齿轮转动的驱动电动机,其中驱动电动机与行走齿轮均固定在焊接底座上;所述直线行走梁的两侧对称设置第一工件固定架和第二工件固定架。
6.本实用新型所述直线行走机构中还设有导向组件,所述导向组件包括相配合的导轨和滑块,所述滑块固定在焊接底座上,所述导轨沿直线行走梁长度方向设置;所述直线行走机构中的导向组件可以采用七轴滑台实现。
7.本实用新型所述第一工件固定架或第二工件固定架包括设置在行走梁同侧的两个固定臂,两个固定臂下端与行走梁连接,上端分别设有工件锁紧法兰盘,所述工件锁紧法兰盘可以采用可转动式锁紧法兰盘,并对应设置转动驱动电动机、转动轴,用于使固定在两个工件锁紧法兰盘之间的工件转动,调整焊接位置。
8.本实用新型所述直线行走梁底部可以设有旋转底座,旋转底座可以采用中空rv减速机配合转动电动机实现,其中rv减速机设置在底座与直线行走梁之间,用于使整个装置完成平面大角度转动,满足工位调整的需要。
9.本实用新型在工作时,将焊接机器人安装于焊接底座上,使焊接机器人沿直线行走梁完成直线位移,对直线行走梁两侧的两个工件固定架上的工件连续处理,减少焊机待机时间,提高焊机工作效率;此外,当处于上料位置固定的使用情境下,可以通过直线行走梁下方的旋转底座快速完成工件固定架与上料工位的对接,保证连续上料,从而提高工作效率。
10.本实用新型与现有技术相比,保证在固定工位或工位切换使用状态下焊机的连续工作,具有固定稳定、工作效率高、设备能耗低等显著的优点。
11.附图说明:
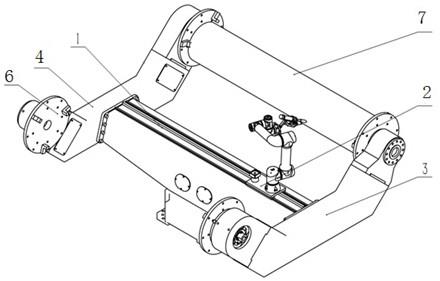
12.附图1是本实用新型的结构示意图。
13.附图2是本实用新型中直线行走机构的结构示意图。
14.附图3是本实用新型中旋转底座的一种结构示意图。
15.附图4是本实用新型的侧面结构示意图。
16.附图标记:直线行走梁1、焊接底座2、第一工件固定架3、第二工件固定架4、导向组件5、工件锁紧法兰盘6、工件7、rv减速机、底座9。
17.具体实施方式:
18.下面结合附图和实施例,对本实用新型做进一步的说明。
19.如附图1所示,本实用新型提出了一种双工位智能行走焊接装置,设有直线行走梁1、焊接底座2、直线行走机构,所述焊接底座2经直线行走机构连接在直线行走梁1上,所述直线行走机构中设有沿行走梁长度方向设置的齿条、与齿条啮合的行走齿轮、用于驱动行走齿轮转动的驱动电动机,其中驱动电动机与行走齿轮均固定在焊接底座2上;所述直线行走梁1的两侧对称设置第一工件固定架3和第二工件固定架4。
20.本实用新型所述直线行走机构中还设有导向组件5,所述导向组件5包括相配合的导轨和滑块,所述滑块固定在焊接底座2上,所述导轨沿直线行走梁长度方向设置;所述直线行走机构中的导向组件5可以采用七轴滑台实现。
21.本实用新型所述第一工件固定架3或第二工件固定架4包括设置在行走梁同侧的两个固定臂,两个固定臂下端与行走梁连接,上端分别设有工件锁紧法兰盘6,所述工件锁紧法兰盘6可以采用可转动式锁紧法兰盘,并对应设置转动驱动电动机、转动轴,用于使固定在两个工件锁紧法兰盘6之间的工件7转动,调整焊接位置。
22.本实用新型所述直线行走梁底部可以设有旋转底座,旋转底座可以采用中空rv减速机配合转动电动机实现,其中rv减速机8设置在底座9与直线行走梁1之间,用于使整个装置完成平面大角度转动,满足工位调整的需要。
23.实施例1:
24.本例提供了一种双工位智能行走焊接装置,设有直线行走梁1、焊接底座2、直线行走机构,所述焊接底座2经直线行走机构连接在直线行走梁1上,所述直线行走机构中设有沿行走梁长度方向设置的齿条、与齿条啮合的行走齿轮、用于驱动行走齿轮转动的驱动电动机,其中驱动电动机与行走齿轮均固定在焊接底座2上;所述直线行走梁1的两侧对称设置第一工件固定架3和第二工件固定架4;所述直线行走机构中还设有导向组件5,所述直线行走机构中的导向组件5采用七轴滑台实现;
25.本例所述第一工件固定架3或第二工件固定架4包括设置在行走梁同侧的两个固定臂,两个固定臂下端与行走梁连接,上端分别设有工件锁紧法兰盘6,所述工件锁紧法兰盘6采用可转动式锁紧法兰盘,并对应设置转动驱动电动机、转动轴,用于使固定在两个工件锁紧法兰盘6之间的工件7转动,调整焊接位置;本例所述直线行走梁底部可以设有旋转底座,旋转底座采用中空rv减速机配合转动电动机实现,其中rv减速机8设置在底座9与直线行走梁1之间,用于使整个装置完成平面大角度转动,满足工位调整的需要。
26.本实用新型在工作时,将焊接机器人安装于焊接底座上,使焊接机器人沿直线行走梁完成直线位移,对直线行走梁两侧的两个工件固定架上的工件连续处理,减少焊机待机时间,提高焊机工作效率;此外,当处于上料位置固定的使用情境下,可以通过直线行走梁下方的旋转底座快速完成工件固定架与上料工位的对接,保证连续上料,从而提高工作效率。
27.本实用新型与现有技术相比,保证在固定工位或工位切换使用状态下焊机的连续工作,具有固定稳定、工作效率高、设备能耗低等显著的优点。
技术特征:
1.一种双工位智能行走焊接装置,其特征在于,设有直线行走梁、焊接底座、直线行走机构,所述焊接底座经直线行走机构连接在直线行走梁上,所述直线行走机构中设有沿行走梁长度方向设置的齿条、与齿条啮合的行走齿轮、用于驱动行走齿轮转动的驱动电动机,其中驱动电动机与行走齿轮均固定在焊接底座上;所述直线行走梁的两侧对称设置第一工件固定架和第二工件固定架。2.根据权利要求1所述的一种双工位智能行走焊接装置,其特征在于,所述直线行走机构中还设有导向组件,所述导向组件包括相配合的导轨和滑块,所述滑块固定在焊接底座上,所述导轨沿直线行走梁长度方向设置。3.根据权利要求1所述的一种双工位智能行走焊接装置,其特征在于,所述直线行走机构中的导向组件采用七轴滑台实现。4.根据权利要求1所述的一种双工位智能行走焊接装置,其特征在于,所述第一工件固定架或第二工件固定架包括设置在行走梁同侧的两个固定臂,两个固定臂下端与行走梁连接,上端分别设有工件锁紧法兰盘。5.根据权利要求4所述的一种双工位智能行走焊接装置,其特征在于,所述工件锁紧法兰盘采用可转动式锁紧法兰盘,并对应设置转动驱动电动机、转动轴。6.根据权利要求1所述的一种双工位智能行走焊接装置,其特征在于,所述直线行走梁底部设有旋转底座,旋转底座采用中空rv减速机配合转动电动机实现,其中rv减速机设置在底座与直线行走梁之间。
技术总结
本实用新型涉及自动化焊接设备制造技术领域,具体的说是一种焊接效率高、行走稳定的双工位智能行走焊接装置,其特征在于,设有直线行走梁、焊接底座、直线行走机构,所述焊接底座经直线行走机构连接在直线行走梁上,所述直线行走机构中设有沿行走梁长度方向设置的齿条、与齿条啮合的行走齿轮、用于驱动行走齿轮转动的驱动电动机,其中驱动电动机与行走齿轮均固定在焊接底座上;所述直线行走梁的两侧对称设置第一工件固定架和第二工件固定架,本实用新型与现有技术相比,保证在固定工位或工位切换使用状态下焊机的连续工作,具有固定稳定、工作效率高、设备能耗低等显著的优点。设备能耗低等显著的优点。设备能耗低等显著的优点。
技术研发人员:巩相峰 吕雪冬
受保护的技术使用者:淄博纽氏达特机器人系统技术有限公司
技术研发日:2021.10.30
技术公布日:2022/4/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1