一种焊接设备的制作方法
1.本实用新型涉及集装箱技术领域,具体而言涉及一种焊接设备。
背景技术:
2.目前中国集装箱产量已占据全球集装箱产量的95%,对集装箱的焊接质量也越来越高。目前集装箱的生产主要由人工焊接完成,而人工焊接存在焊接质量不稳定、焊道不连续和效率低下等问题。
3.虽然集装箱制造企业已经在集装箱生产过程中已经引入机器人,但大多数机器人在焊接过程中仍采用的示教再现的工作模式。并且有些工件的表面凹凸起伏,例如波形板。机器人对焊缝进行追踪时可能被起伏所阻挡,导致追踪精度差,进而影响焊接质量。
4.因此,需要一种焊接设备,以至少部分地解决以上问题。
技术实现要素:
5.在实用新型内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本实用新型的实用新型内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
6.为至少部分地解决上述问题,本实用新型提供了一种焊接设备,用于集装箱的焊接,所述焊接设备包括采集装置,所述采集装置用于采集待焊接工件的缝隙的形状及位置数据,所述采集装置包括:
7.丝杠;
8.支架,所述支架可移动地设置在所述丝杠上,以使得所述支架能够沿所述缝隙的延伸方向移动;
9.刻度板,所述刻度板设置在所述支架上,所述刻度板的周缘设置有圆周角度;以及
10.传感器,所述传感器可枢转地安装至所述刻度板的中部,以使得所述传感器的采集路径能够适应具有不同种类波纹的待焊接工件而不被遮挡。
11.进一步地,所述焊接设备还包括:
12.焊接机器人,用于对所述缝隙进行焊接,所述焊接机器人设置在所述采集装置远离所述待焊接工件的一侧;
13.控制装置,所述控制装置与所述采集装置以及所述焊接机器人信号连接,所述控制装置配置为处理所述采集装置采集的数据并控制所述焊接机器人根据处理后的数据对所述缝隙进行焊接。
14.进一步地,所述焊接机器人的末端具有法兰盘,所述法兰盘上设置有焊枪;所述控制装置还配置为根据所述采集装置采集的数据对所述焊接机器人的运动轨迹实时控制。
15.进一步地,所述焊接设备还包括焊机,所述焊机与所述焊枪连接,所述焊机用于为所述焊枪提供能源和/或焊料。
16.进一步地,所述传感器构造为线激光传感器。
17.根据本实用新型的焊接设备,能够提高焊接设备对焊缝的追踪精度,尤其是适用于波形较深的波纹板焊缝的追踪,有利于提高焊接质量。
附图说明
18.本实用新型的下列附图在此作为本实用新型的一部分用于理解本实用新型。附图中示出了本实用新型的实施例及其描述,用来解释本实用新型的原理。
19.附图中:
20.图1为根据本实用新型的焊接设备的部分结构示意图;
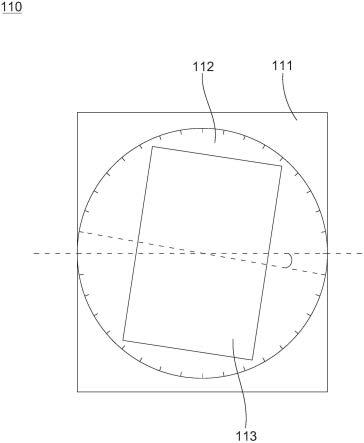
21.图2为图1中采集装置的俯视示意图;以及
22.图3为根据本实用新型的焊接设备的模块化示意图。
23.附图标记说明:
24.10:待焊接工件
ꢀꢀꢀꢀꢀ
100:焊接设备
ꢀꢀꢀꢀꢀꢀꢀ
110:采集装置
25.111:支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
112:刻度板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
113:传感器
26.114:丝杠
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
120:焊接机器人
ꢀꢀꢀꢀꢀ
121:法兰盘
27.122:焊枪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
130:控制装置
ꢀꢀꢀꢀꢀꢀꢀ
140:焊机
具体实施方式
28.在下文的描述中,给出了大量具体的细节以便提供对本实用新型更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本实用新型可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本实用新型发生混淆,对于本领域公知的一些技术特征未进行描述。
29.为了彻底理解本实用新型,将在下列的描述中提出详细的描述。应当理解的是,提供这些实施例是为了使得本实用新型的公开彻底且完整,并且将这些示例性实施例的构思充分传达给本领域普通技术人员。显然,本实用新型实施方式的施行并不限定于本领域的技术人员所熟悉的特殊细节。本实用新型的较佳实施例详细描述如下,然而除了这些详细描述外,本实用新型还可以具有其他实施方式。
30.应予以注意的是,这里所使用的术语仅是为了描述具体实施例,而非意图限制根据本实用新型的示例性实施例。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式。此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在所述特征、整体、步骤、操作、元件和/或组件,但不排除存在或附加一个或多个其他特征、整体、步骤、操作、元件、组件和/或它们的组合。
31.需要说明的是,本文中所使用的术语“上”、“下”、“前”、“后”、“左”、“右”、“内”、“外”以及类似的表述只是为了说明目的,并非限制。
32.现在,将参照附图更详细地描述根据本实用新型的示例性实施例。
33.本实用新型的优选实施方式的焊接设备100用于集装箱的焊接。特别地,其适合进行波纹板,由其是适合于具有深波的波纹板的焊接。
34.参考图1和图3,焊接设备100包括采集装置110、控制装置130、焊接机器人120和焊机140。
35.其中,焊接机器人120上设置有焊枪122,其用于对待焊接的缝隙进行焊接作业。焊接机器人120设置在采集装置110远离待焊接工件10的一侧。具体而言,焊接机器人120的末端设置有法兰盘121,焊枪122则设置早法兰盘121上。焊接机器人120构造为其末端能够沿待焊接的缝隙移动,进而焊枪122也能够跟随焊接机器人的末端同步移动。
36.采集装置110用于采集待焊接工件10的缝隙的形状及位置数据。示例性地,采集装置110可以设置在焊接机器人120和待焊接工件10之间。焊机140与焊枪122连接,其为焊枪122提供焊料和能源(例如电能等)。
37.控制装置130则与焊机140、焊接机器人120以及采集装置110均信号连接。其配置为根据采集装置110采集的数据对焊接机器人120的运动轨迹实时控制。具体地,控制装置130接收并处理采集装置110所采集的数据,以此生成焊接机器人120的预设运行轨迹,并控制焊接机器人120沿该轨迹移动,进而对待焊接的缝隙进行焊接。并且控制装置130还配置为根据焊接的进度控制焊机140向焊枪122提供材料和能源。
38.优选地,采集并生成轨迹数据可以和焊接同步进行。
39.采集装置110的具体结构请参考图1和图2。其包括丝杠114、支架111、刻度板112以及传感器113。其中,传感器113优选为线激光传感器。
40.具体地,支架111设置在丝杠114上,其能够沿丝杠114可移动。丝杠114优选为沿待焊接工件10(波纹板)延伸方向设置(例如可以是波纹板的长度方向),由此支架111能够沿待焊接的缝隙的延伸方向移动。
41.刻度板112设置在支架111上,传感器113设置在刻度板112上。由此,传感器113能够跟随支架111的移动沿待焊接的缝隙的延伸方向移动,进而扫描获取到整个缝隙的数据。
42.其中,刻度板112的周缘设置有圆周角度,传感器113可枢转地安装至刻度板112的中部。操作人员能够根据刻度板112上的角度标识精确旋转传感器113,以达到预定的角度。由此,能够使得传感器113的采集路径避开待焊接工件10上的起伏的阻挡,使其能够适应不同种类波纹(深波、浅波等)。
43.根据本实用新型的焊接设备100,能够提高焊接设备100对焊缝的追踪精度,尤其是适用于波形较深的波纹板焊缝的追踪,有利于提高焊接质量。
44.除非另有定义,本文中所使用的技术和科学术语与本实用新型的技术领域的技术人员通常理解的含义相同。本文中使用的术语只是为了描述具体的实施目的,不是旨在限制本实用新型。本文中在一个实施方式中描述的特征可以单独地或与其它特征结合地应用于另一个实施方式,除非该特征在该另一个实施方式中不适用或是另有说明。
45.本实用新型已经通过上述实施例进行了说明,但应当理解的是,上述实施例只是用于举例和说明的目的,而非意在将本实用新型限制于所描述的实施例范围内。此外本领域技术人员可以理解的是,本实用新型并不局限于上述实施例,根据本实用新型的教导还可以做出更多种的变型和修改,这些变型和修改均落在本实用新型所要求保护的范围以内。本实用新型的保护范围由附属的权利要求书及其等效范围所界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1