用于3D打印的平台、系统和设备的制作方法
用于3d打印的平台、系统和设备
交叉引用
1.本技术要求于2020年2月3日提交的美国临时专利申请号62/969,434和2020年4月15日提交的美国临时专利申请号63/010,405的权益,其中每一个均通过引用全部并入本文。
背景技术:
2.晶格可以是单元(例如,对称单元),其可以包括一维或多维图案,其在以给定间隔(例如,规则间隔)重复时,可以产生结构,例如晶体结构。这种结构在科学和技术的不同领域得到了广泛的研究。
3.在3d打印领域中,立体光刻(sla)通过光投射在包含在打印料盘中的光敏树脂上进行工作。投射的光可以引发聚合反应,该聚合反应可以生成可以粘附到打印台的交联聚合物结构。
技术实现要素:
4.使用晶体结构建模和/或制造对象可能是耗时的。此外,根据场景中涉及的晶体数量,可能很难使用基于网格的渲染器和/或人工操作等技术来可视化此类场景。在许多情况下,此类技术可能需要建模工具来为用户提供合适的功能。在一些情况下,使用传统的基于几何的建模工具测试这种复杂的场景可能在计算上非常昂贵且耗时,在一些情况下甚至是不可行的。
5.过程几何可以是传统的基于几何的建模的替代方法,传统的基于几何的建模可以包括使用一种或多种算法来描述一个或多个场景,作为几何图元列表的替代或结合几何图元的列表。在计算机图形学的几个领域中,过程建模可以作为基于几何的方法的替代或补充方法应用。在一些示例中,autocad、solidworks或inventors等建模工具可以使用过程建模来生成某些类型的几何体。但是,出于实际原因,现有工具可能无法有效地将几何图形可视化或操作为函数;相反,在大多数情况下,它们可以将几何的隐式表示转换为顶点列表。在许多情况下,这种方法可能至少部分地包含或使过程建模方法的潜在优势无效。过程建模方法的这些优点可以包括有效地可视化场景的能力,包括大而详细的场景和/或通过占用更少的磁盘空间来存储这种可视化,在一些情况下,只使用几个字节的磁盘空间。
6.在一方面,本文描述的是提供许多优点(例如,可视化和操纵由具有无限细节水平的无限数量的晶格组成的晶体结构的能力)的过程建模套件。在存储空间的利用方面,它还提供了一种新颖而紧凑的方法,以将那些复杂的场景保存在只有几千字节的文件中,而不是浪费太字节的空间来存储仅一个场景的几何图形。在一些情况下,本文描述的过程建模套件将指令传输到一个或多个3d打印设备,以便可以物理实现建模结构以使许多科学和技术领域受益。
7.在另一方面,本文描述的是包括对sla的改进的3d打印技术,特别是基于数字光处理(dlp)的sla。在基于dlp的sla的情况下,投影图案由数字掩模递送。一旦第一层被投影预
定时间并且聚合层被粘附到打印台,打印台沿着z轴向上移动并且第二层被投影。然后,这一层粘附到前一层。随着层的后续投影,生成了3d几何图形。
8.在一些实施方式中,本文所述的基于dlp的sla能够实现基于像素的光调制和管理,并且适用于制造微米尺寸的结构。重要的微米尺寸的结构包括但不限于包含以周期性方式空间分布以形成晶格的晶体几何体的结构。在一些情况下,这样的结构是多孔结构,并且在另外的示例中,这样的结构是微流体结构。在特定情况下,本文所述的3d打印技术适用于其以商业规模和尺寸打印连续流动的微生物反应器,例如美国专利申请序列号62/743,974和国际申请号pct/us19/55231中公开的那些,这些专利通过引用全部并入本文。
9.在这些努力中面临的主要限制包括市场上可用的sla技术(例如,lcd、激光和基于dlp)无法实现许多微结构所需的分辨率的事实。由于像素或激光光斑的大小,lcd和激光技术分别无法达到所需的分辨率。此外,基于sla-dlp的商用技术可以达到所需的分辨率,但仅适用于低“孔体积”部件的打印。
10.在大尺寸部件的3d打印中保持高分辨率尤其具有挑战性。一种在保持高分辨率的同时打印大部分部件的方法称为扫描投影立体光刻。它基于使用龙门架,该龙门架使投影仪能够在打印料盘下方滚动。对于扫描-投影立体光刻,主要限制包括机械噪声可能会转化为打印工艺,导致打印分辨率范围内的打印误差,以及由于投影仪在打印区域上的位移距离大而减慢处理的打印速度的事实。
11.一种连续3d打印技术被称为连续液体界面生产(clip),但对于clip,打印体积小,无法打印大结构。为了克服现有方法的这些限制,我们提出了一种基于静态光学设置的3d打印技术,用于打印高分辨率的大型结构。
12.因此,在一个方面,本文公开立体光刻3d打印设备,包括:静态光学组件,包括:光引擎,其被配置为沿z轴投射包括多个像素的lux光束(luxbeam);至少一个准直透镜,其被配置为准直lux光束;微透镜阵列(mla),其被配置为将所述准直的lux光束聚焦到较小直径的最终光束,其中所述lux光束的每个像素被细分为多个子像素,以倍增所述最终光束的分辨率;微光圈阵列(mda),其被配置为减少所述mla的透镜之间的噪声和串扰;至少一个投影透镜;和可移动台,其被配置为在x-y平面中平移所述至少一个投影透镜中的一个或多个;其中所述静态光学组件的所述光引擎、所述准直透镜、所述mla、所述至少一个投影透镜和所述可移动台之间沿所述z轴的距离是固定的;打印料盘,其包括可在z轴上移动的打印台;和控制电路,其被配置为至少控制所述光引擎、所述可移动台和所述打印台以实现立体光刻3d打印。在一些实施方式中,光引擎包括uv投影仪和/或深uv投影仪。在各种实施方式中,所述光引擎具有在370nm和415nm之间的操作波长。在特定实施方式中,所述光引擎具有约405nm的操作波长。在其他特定实施方式中,所述光引擎具有约380nm的操作波长。在一些实施方式中,所述光引擎是被配置为投射第一操作波长的第一光引擎,并且所述3d打印设备还包括被配置为投射第二操作波长的第二光引擎。在进一步的实施方式中,所述第二光引擎与所述第一光引擎并行操作,并且选择所述第二操作波长以抑制所述打印料盘中的光固化树脂的聚合。在一些实施方式中,所述光引擎包括数字微镜设备(dmd)。在各种进一步的实施方式中,所述dmd具有约2560像素乘以约1600像素的分辨率。在一些实施方式中,所述光引擎包括硅上液晶(lcos)设备。在各种进一步的实施方式中,所述lcos设备具有约4096像素乘以约2400像素的分辨率。在特定实施方式中,所述光引擎具有约90mm乘以约50mm的
光生成区域。在其他特定实施方式中,所述光引擎具有约140mm乘以约90mm的光生成区域。在一些实施方式中,3d打印设备包括准直透镜系统。在进一步的实施方式中,准直透镜系统包括2至6个准直透镜。在一些实施方式中,所述可移动台包括压电机构,所述压电机构被配置为在所述x-y平面中平移所述至少一个投影透镜中的一个或多个。在进一步的实施方式中,所述压电机构以纳米分辨率在所述x-y平面中平移所述至少一个投影透镜中的一个或多个。在进一步的实施方式中,所述台在所述x轴上具有至少50μm并且在所述y轴上具有至少50μm的平移范围。在更进一步的实施方式中,所述台在所述x轴上具有约100μm并且在所述y轴上具有约100μm的平移范围。在一些实施方式中,所述台具有小于或等于所述子像素长度的平移分辨率。在各种实施方式中,所述mla包括双凸阵列、双凹阵列、单凸阵列、单凹阵列或它们的组合。在具体的进一步实施方式中,mla包括单片双凸阵列。在一些实施方式中,所述mla包括平面基板和位于所述基板平面的两个最大相对侧的每一个上的多个微透镜。在各种进一步的实施方式中,所述平面基板是硼硅酸盐或蚀刻玻璃,并且所述多个微透镜是聚合物或玻璃。在特定实施方式中,所述mda位于所述平面基板和所述mla的所述多个微透镜之一之间。在一些实施方式中,3d打印设备包括多个mda,例如2、3或4个mda。在各种实施方式中,所述mda具有10μm至15μm的光圈孔径尺寸。在各种实施方式中,所述mla将所述lux光束的每个像素细分为4到7498个子像素。在进一步的各种实施方式中,所述mla将所述lux光束的每个像素细分为4到100个子像素。在特定实施方式中,所述mla将所述lux光束的每个像素细分为9个子像素。在其他特定实施方式中,所述mla将所述lux光束的每个像素细分为25个子像素。在其他特定实施方式中,所述mla将所述lux光束的每个像素细分为49个子像素。在一些实施方式中,所述至少一个投影透镜扩展所述最终打印区域。在替代实施方式中,所述至少一个投影透镜减小所述最终打印区域。在一些实施方式中,所述最终打印区域是所述光引擎的所述光生成区域的至少2倍。在进一步的实施方式中,所述最终打印区域是所述光引擎的所述光生成区域的至少4倍。在一些实施方式中,所述控制电路被配置为至少控制所述光引擎、所述可移动台和所述打印台以实现半连续、基本连续或连续模式的立体光刻3d打印。在一些实施方式中,所述控制电路被配置为控制所述打印台以预定的恒定速度在所述z轴上移动。在一些实施方式中,所述控制电路被配置为控制所述可移动台以在所述x-y平面中平移所述至少一个投影透镜中的一个或多个,从而以预定图案扫描所述lux光束。在进一步的实施方式中,预定图案包括螺旋图案。在一些实施方式中,所述预定图案包括连续的空间填充曲线。在进一步的实施方式中,所述预定图案包括sierpinski曲线。在特定的非限制性实施方式中,所述控制电路被配置为至少控制所述光引擎、所述可移动台和所述打印台以实现包括以周期性方式空间分布的螺旋几何形状的多孔结构的立体光刻3d打印。在一些实施方式中,3d打印设备还包括机器人台架,其被配置为相对于所述打印料盘在所述x-y平面中滚动所述静态光学组件。在进一步的实施方式中,所述控制电路还被配置为控制所述机器人台架。在一些实施方式中,所述控制电路被配置为控制所述打印台以实现自下而上的立体光刻3d打印。在替代实施方式中,所述控制电路被配置为控制所述打印台以实现自上而下的立体光刻3d打印。在一些实施方式中,所述打印料盘包括多相光固化树脂。在一些实施方式中,3d打印设备被配置用于无菌3d打印,并且打印料盘包括无菌光固化树脂。
13.在另一方面,本文公开了计算机实现的系统,包括:至少一个处理器、存储器和可
由所述至少一个处理器执行以创建过程建模应用的指令,所述过程建模应用包括:图形用户界面(gui),其包括视口(viewport);呈现模块,其被配置为将场景表示为符号距离函数(signed distance function)并通过利用光线行进来渲染所述场景,所述呈现模块包括:场景库,其包括一个或多个过程对象(po);场景编辑器,其允许用户向所述场景添加一个或多个po,并为所述场景创建构造立体几何(csg)树;过程对象(po)编辑器,其允许所述用户编辑添加到所述场景中的每个po的属性;模拟编辑器,其允许所述用户配置所述场景的一个或多个模拟;和打印编辑器,其允许所述用户配置打印的场景;模拟模块,其被配置为在所述场景中进行所述一个或多个模拟;和打印模块,其被配置为生成切片文件队列并将所述切片文件传输到3d打印机。在一些实施方式中,所述呈现模块允许用户将po从所述场景库中拖拽到所述视口中以将其添加到所述场景中。在一些实施方式中,所述呈现模块允许用户将编辑的po保存在所述场景库中。在一些实施方式中,所述一个或多个po包括结晶单元。在进一步的实施方式中,所述呈现模块允许用户复制所述结晶单元以在所述场景中形成晶格。在一些实施方式中,po的属性包括用于连接到一个或多个相邻po的链路和连接所述链路的管道。在一些实施方式中,所述符号距离函数包括表示整个晶格的数学方程。在特定的非限制性实施方式中,所述结晶单元包括螺旋体。在进一步特定的非限制性实施方式中,所述晶格包括以周期性方式空间分布的螺旋几何形状。在一些实施方式中,所述符号距离函数不包括几何图元列表。在各种实施方式中,一个或多个模拟包括以下中的一个或多个:微流体模拟、计算流体动力学(cfd)模拟、使用格子玻尔兹曼方法(lattice boltzmann method,lbm)结合符号距离函数以求解cfd模拟,或其组合。在一些实施方式中,所述一个或多个模拟包括所述模拟的一个或多个特征的可视化。在各种实施方式中,所述打印编辑器允许所述用户配置以下中的一项或多项:表面轮廓、打印机执行顺序、层厚度、lux光束曝光时间和像素分辨率。在一些实施方式中,所述过程建模应用的性能不会随着所述场景的大小或所述场景的细节的增加而降低。在一些实施方式中,至少一个处理器包括多个图形处理单元(gpu)。在一些实施方式中,至少一个处理器包括云计算平台。
14.在另一方面中,本文公开了非暂时性计算机可读存储介质,其编码有可由至少一个处理器执行以创建过程建模应用的指令,所述过程建模应用包括:图形用户界面(gui),其包括视口;呈现模块,其被配置为将场景表示为符号距离函数并通过利用光线行进来渲染所述场景,所述呈现模块包括:场景库,其包括一个或多个过程对象(po);场景编辑器,其允许用户向所述场景添加一个或多个po,并为所述场景创建构造立体几何(csg)树;过程对象(po)编辑器,其允许所述用户编辑添加到所述场景中的每个po的属性;模拟编辑器,其允许所述用户配置所述场景的一个或多个模拟;和打印编辑器,其允许所述用户配置打印的场景;模拟模块,其被配置为在所述场景中进行所述一个或多个模拟;和打印模块,其被配置为生成切片文件队列并将所述切片文件传输到3d打印机。在一些实施方式中,所述呈现模块允许用户将po从所述场景库中拖拽到所述视口中以将其添加到所述场景中。在一些实施方式中,所述呈现模块允许用户将编辑的po保存在所述场景库中。在一些实施方式中,所述一个或多个po包括结晶单元。在进一步的实施方式中,所述呈现模块允许用户复制所述结晶单元以在所述场景中形成晶格。在一些实施方式中,po的属性包括用于连接到一个或多个相邻po的链路和连接所述链路的管道。在一些实施方式中,所述符号距离函数包括表示整个晶格的数学方程。在特定的非限制性实施方式中,所述结晶单元包括螺旋体。在进一
步特定的非限制性实施方式中,所述晶格包括以周期性方式空间分布的螺旋几何形状。在一些实施方式中,所述符号距离函数不包括几何图元列表。在各种实施方式中,一个或多个模拟包括以下中的一个或多个:微流体模拟、计算流体动力学(cfd)模拟、使用格子玻尔兹曼方法(lbm)结合符号距离函数以求解cfd模拟,或其组合。在一些实施方式中,所述一个或多个模拟包括所述模拟的一个或多个特征的可视化。在各种实施方式中,所述打印编辑器允许所述用户配置以下中的一项或多项:表面轮廓、打印机执行顺序、层厚度、lux光束曝光时间和像素分辨率。在一些实施方式中,所述过程建模应用的性能不会随着所述场景的大小或所述场景的细节的增加而降低。在一些实施方式中,至少一个处理器包括多个图形处理单元(gpu)。在一些实施方式中,至少一个处理器包括云计算平台。
15.在另一方面,本文公开了用于过程建模的计算机实现的方法,包括:提供过程建模应用,所述过程建模应用包括:场景库,其包括一个或多个过程对象(po);场景编辑器,其允许用户向所述场景添加一个或多个po,并为所述场景创建构造立体几何(csg)树;过程对象(po)编辑器,其允许所述用户编辑添加到所述场景中的每个po的属性;模拟编辑器,其允许所述用户配置所述场景的一个或多个模拟;和打印编辑器,其允许所述用户配置打印的场景;将所述场景表示为符号距离函数;通过利用光线行进渲染场景;在场景中进行一个或多个模拟;生成切片文件队列;和将切片文件传输到3d打印机。在一些实施方式中,所述呈现模块允许用户将po从所述场景库中拖拽到所述视口中以将其添加到所述场景中。在一些实施方式中,所述呈现模块允许用户将编辑的po保存在所述场景库中。在一些实施方式中,所述一个或多个po包括结晶单元。在进一步的实施方式中,所述呈现模块允许用户复制所述结晶单元以在所述场景中形成晶格。在一些实施方式中,po的属性包括用于连接到一个或多个相邻po的链路和连接所述链路的管道。在一些实施方式中,所述符号距离函数包括表示整个晶格的数学方程。在特定的非限制性实施方式中,所述结晶单元包括螺旋体。在进一步特定的非限制性实施方式中,所述晶格包括以周期性方式空间分布的螺旋几何形状。在一些实施方式中,所述符号距离函数不包括几何图元列表。在各种实施方式中,一个或多个模拟包括以下中的一个或多个:微流体模拟、计算流体动力学(cfd)模拟、使用格子玻尔兹曼方法(lbm)结合符号距离函数以求解cfd模拟,或其组合。在一些实施方式中,一个或多个模拟包括模拟的一个或多个特征的可视化。在各种实施方式中,所述打印编辑器允许所述用户配置以下中的一项或多项:表面轮廓、打印机执行顺序、层厚度、lux光束曝光时间和像素分辨率。
16.在另一方面,本文公开了制造包括多个重复单元的3d对象的方法,所述方法包括:提供过程建模应用,所述过程建模应用允许用户至少执行:将一个或多个结晶单元添加到3d场景;复制所述一个或多个结晶单元以在所述场景中形成晶格;和配置用于连接所复制的结晶单元的链路和连接所述链路的管道;为所述场景创建构造立体几何(csg)树;将所述3d场景表示为符号距离函数;通过利用光线行进渲染场景;生成切片文件队列;和将切片文件传输到3d打印设备,例如立体光刻3d打印设备。在一些实施方式中,所述结晶单元以周期性方式空间分布以形成所述晶格。在各种实施方式中,所述过程建模应用还允许所述用户至少执行以下中的一项或多项:从场景库中选择一个或多个结晶单元;编辑添加到所述场景中的每个结晶单元的属性;配置所述场景的一个或多个模拟;和为3d打印配置所述场景。在一些实施方式中,该方法还包括在所述场景中进行所述一个或多个模拟。在进一步的实
施方式中,所述一个或多个模拟包括微流体模拟。在其他实施方式中,所述一个或多个模拟包括计算流体动力学(cfd)模拟。在又一实施方式中,所述一个或多个模拟包括使用格子玻尔兹曼方法(lbm)结合所述符号距离函数以求解cfd模拟。在一些实施方式中,所述一个或多个模拟包括所述模拟的一个或多个特征的可视化。在一些实施方式中,所述符号距离函数包括表示整个晶格的数学方程。在一些实施方式中,所述符号距离函数不包括几何图元列表。在一些实施方式中,所述结晶单元在所述晶格中以高密度重复。在特定的非限制性实施方式中,3d对象包括生物反应器。
17.在另一方面,本文公开了制造生物反应器的方法,该方法包括:提供过程建模应用,所述过程建模应用允许用户至少执行:将多个微型模块添加到3d场景;和将所述多个微型模块组装成宏观结构以创建生物反应器;为所述场景创建构造立体几何(csg)树;将所述3d场景表示为符号距离函数;通过利用光线行进渲染所述场景;生成切片文件队列;和将所述切片文件传输到立体光刻3d打印设备。在一些实施方式中,所述微型模块中的一个或多个是双螺旋体(dg)或修改的dg。在一些实施方式中,所述微型模块在所述宏观结构内布置成多层。在进一步的实施方式中,将所述多层组装成第一矩阵和第二矩阵,其中所述第二矩阵占据所述第一矩阵中的自由空间,并且其中所述第一矩阵和所述第二矩阵占据相同的体积,没有接触点,并保持恒定的最小距离。在一些实施方式中,所述3d场景和所述切片文件被配置用于多达约320mm
×
320mm的打印表面。在一些实施方式中,所述3d场景的立方毫米体积包括多达约14个微型模块。在一些实施方式中,所述生物反应器的打印体积多达约102,400,000立方毫米。在一些实施方式中,所述生物反应器的打印体积包括多达约1,496,704,035个微型模块。在一些实施方式中,所述微型模块中的一个或多个包括通道,并且其中所述通道具有约8μm至约2000μm的直径。在各种实施方式中,每个微型模块具有约40μm至约9797μm的边缘长度。在各种实施方式中,每个微型模块具有约68417至约9.4
×
10
11
立方微米的体积。
18.在另一方面,本文公开了生物反应器,包括:多个体积,每个体积包括对称重复成三维晶格的结晶单元,每个三维晶格功能化并流体互连以提供至少一个微通道或腔室;接种微通道,其被配置为将多个细胞接收到所述生物反应器中;收获微通道,其被配置为从所述生物反应器接收多个细胞或其衍生物;第一通道系统,其包括由所述多个体积中的一个或多个的所述至少一个微通道或腔室形成的至少一个微通道;和第二通道系统,其包括由所述多个体积中的一个或多个的所述至少一个微通道或腔室形成的至少一个微通道;其中所述第一通道系统和所述第二通道系统向所述生物反应器提供单独的输入。在一些实施方式中,生物反应器是无气泡生物反应器。在一些实施方式中,生物反应器产生连续的层流介质。在一些实施方式中,生物反应器产生连续的层流气体。在一些实施方式中,生物反应器具有球形拓扑结构。在进一步的实施方式中,所述多个体积布置在距离所述球形拓扑结构的中心不同距离处的同心层中。在各种实施方式中,生物反应器包括3、4、5、6、7、8、9或10个体积。在特定实施方式中,生物反应器包括8个体积。在一些实施方式中,结晶单元包括双螺旋结构或修改的双螺旋结构。在一些实施方式中,所述接种通道将所述多个细胞递送至所述生物反应器的中心体积。在一些实施方式中,所述第一通道系统是流体连接所述接种微通道和所述收获微通道的液体介质系统。在进一步的实施方式中,所述介质系统还包括至少一个介质摄入微通道。在进一步的实施方式中,所述生物反应器还包括液体介质输入设
备,所述液体介质输入设备被配置为使液体介质流入每个介质摄入微通道。在进一步的实施方式中,所述介质系统被配置为提供介质的均匀分布。在一些实施方式中,所述多个体积包括一个或多个功能化用于细胞培养的体积。在特定实施方式中,所述多个体积包括4个功能化用于细胞培养的体积。在一些实施方式中,所述第二通道系统是气体系统。在进一步的实施方式中,所述气体系统还包括至少一个气体摄入微通道。在进一步的实施方式中,所述气体系统将所述至少一个气体摄入微通道与所述生物反应器的外部流体连接。在进一步的实施方式中,所述生物反应器还包括气体输入设备,所述气体输入设备被配置为使气体成分流入每个气体摄入微通道。在进一步的实施方式中,所述气体系统被配置为提供气体的均匀分布。在一些实施方式中,所述多个体积包括一个或多个功能化用于气体分布并且包括气体分布室的体积。在特定实施方式中,所述多个体积包括5个功能化用于气体分布并且包括气体分布室的体积。在一些实施方式中,所述介质系统和所述气体系统是由一个或多个多孔膜隔开的非重叠系统。在一些实施方式中,所述多个体积包括与所述收获微通道流体连通并且包括收获室的收获层。在一些实施方式中,所述生物反应器还包括外层。在一些实施方式中,所述多个体积包括在不同功能化体积之间的一个或多个过渡层,并且所述结晶单元包括过渡晶体。
19.在另一方面,本文公开了用于培养多个细胞或其衍生物的方法,包括:提供生物反应器,包括:多个体积,每个体积包括对称重复成三维晶格的结晶单元,每个三维晶格功能化并流体互连以提供至少一个微通道或腔室;接种微通道,其被配置为将第一多个细胞接收到所述生物反应器中;收获微通道,其被配置为从所述生物反应器接收第二多个细胞或生物产品;第一通道系统,其包括由所述多个体积中的一个或多个的所述至少一个微通道或腔室形成的至少一个微通道;和第二通道系统,其包括由所述多个体积中的一个或多个的所述至少一个微通道或腔室形成的至少一个微通道;其中所述第一通道系统和所述第二通道系统向所述生物反应器提供单独的输入;和将所述第一多个细胞引导至所述接种微通道,所述多个细胞从所述接种微通道流过所述多个体积的所述至少一个微通道或腔室,并且其中所述第一多个细胞经历细胞生长以产生所述第二多个细胞。在一些实施方式中,所述方法还包括从所述收获微通道收获所述第二多个细胞或其亚群。在一些实施方式中,所述第二多个细胞或其亚群产生所述生物产品。在一些实施方式中,所述方法还包括从所述收获通道收获所述生物产品。在一些实施方式中,生物产品是蛋白质、抗体、小分子和/或代谢物。在一些实施方式中,第一多个细胞包括原核细胞。在一些实施方式中,第一多个细胞包括真核细胞。在各种实施方式中,多个细胞选自:细菌细胞、真菌细胞、酵母细胞、藻类细胞、植物细胞、禽类细胞、哺乳动物细胞及其任何组合。在一些实施方式中,生物反应器是无气泡生物反应器。在一些实施方式中,生物反应器产生连续的层流介质。在一些实施方式中,生物反应器产生连续的层流气体。在一些实施方式中,生物反应器具有球形拓扑结构。在进一步的实施方式中,所述多个体积布置在距离所述球形拓扑结构的中心不同距离处的同心层中。在各种实施方式中,生物反应器包括3、4、5、6、7、8、9或10个体积。在特定实施方式中,生物反应器包括8个体积。在一些实施方式中,结晶单元包括双螺旋结构或修改的双螺旋结构。在一些实施方式中,接种通道将第一多个细胞递送至生物反应器的中心体积。在一些实施方式中,第一通道系统是流体连接接种微通道和收获微通道的液体介质系统。在进一步的实施方式中,介质系统还包括至少一个介质摄入微通道。在进一步的实施方式中,
所述生物反应器还包括液体介质输入设备,所述液体介质输入设备被配置为使液体介质流入每个介质摄入微通道。在进一步的实施方式中,所述介质系统被配置为提供介质的均匀分布。在一些实施方式中,所述多个体积包括一个或多个功能化用于细胞培养的体积。所述多个体积包括4个功能化用于细胞培养的体积。在一些实施方式中,第二通道系统是气体系统。在进一步的实施方式中,气体系统还包括至少一个气体摄入微通道。在进一步的实施方式中,所述气体系统将所述至少一个气体摄入微通道与所述生物反应器的外部流体连接。在进一步的实施方式中,所述生物反应器还包括气体输入设备,所述气体输入设备被配置为使气体成分流入每个气体摄入微通道。在进一步的实施方式中,气体系统被配置为提供气体的均匀分布。在一些实施方式中,所述多个体积包括一个或多个功能化用于气体分布并且包括气体分布室的体积。在特定实施方式中,所述多个体积包括5个功能化用于气体分布并且包括气体分布室的体积。在一些实施方式中,所述介质系统和所述气体系统是由一个或多个多孔膜隔开的非重叠系统。在一些实施方式中,所述多个体积包括与所述收获微通道流体连通并且包括收获室的收获层。在一些实施方式中,生物反应器还包括外层。在一些实施方式中,所述多个体积包括在不同功能化体积之间的一个或多个过渡层,并且所述结晶单元包括过渡晶体。
20.在另一方面,本文公开了计算机实现的系统,包括:至少一个处理器、存储器和可由所述至少一个处理器执行以创建过程建模应用的指令,所述过程建模应用包括:界面,其允许用户至少执行以下操作:在场景中定义至少一个体积,为所述至少一个体积识别结晶单元,识别结晶单元的对称性,和编辑结晶单元的属性;呈现模块,其被配置为:根据所识别的对称性复制所识别的结晶单元以生成三维晶格,所述三维晶格功能化并且流体互连以提供至少一个微通道或腔室;将所述场景表示为符号距离函数,和渲染场景;模拟编辑器,其允许所述用户配置所述场景的一个或多个模拟;模拟模块,其被配置为在所述场景中进行所述一个或多个模拟;打印编辑器,其允许所述用户配置打印的场景;和打印模块,其被配置为生成切片文件队列并将所述切片文件传输到3d打印机。在一些实施方式中,所述界面还允许所述用户在所述至少一个体积中配置一个或多个微通道。在一些实施方式中,至少一个微通道或腔室包括流体连续液体或气体传输系统。在一些实施方式中,所述结晶单元的属性包括用于连接到一个或多个相邻结晶单元的链路和连接所述链路的管道。在一些实施方式中,所述符号距离函数包括表示整个晶格的数学方程。在一些实施方式中,结晶单元包括螺旋体。在进一步的实施方式中,所述晶格包括以周期性方式空间分布的螺旋几何形状。在一些实施方式中,过程建模应用还包括深度学习算法,该深度学习算法被训练为预测:不同功能化体积之间的过渡体积,和过渡体积的过渡结晶单元。在一些实施方式中,该算法包括一个或多个神经元网络(nn)。在各种进一步的实施方式中,一个或多个nn包括一个或多个生成对抗网络(gan)或一个或多个变分自动编码器(vae)。在一些实施方式中,一个或多个模拟包括有限元分析(fea)。在一些实施方式中,所述一个或多个模拟评估所述至少一个微通道或腔室的微流体连续性。在一些实施方式中,所述符号距离函数不包括几何图元列表。在一些实施方式中,所述过程建模应用的性能不会随着所述场景的大小或所述场景的细节的增加而降低。在一些实施方式中,至少一个处理器包括多个图形处理单元(gpu)。在一些实施方式中,至少一个处理器包括云计算平台。
附图说明
21.通过参考以下阐述说明性实施方式和附图的详细描述,将获得对本主题的特征和优点的更好理解,其中:
22.图1示出了3d几何的示例;在这种情况下,晶体结构包括由以规则间隔重复的单体形成的三维图案;
23.图2示出了光栅化管线的非限制性示意图;在这种情况下,光栅化管线从3d网格开始,包括执行顶点处理、光栅化、光栅操作和片段处理以生成图像输出;
24.图3示出了光线追踪方法的非限制性示意图;在这种情况下,光线追踪方法包括从相机原点投影光线,以找出每条光线覆盖场景的那个部分;
25.图4示出了流程图的非限制性示例;在这种情况下,流程图说明了用于从单个数学方程(例如符号距离函数)表示完全过程环境的光线行进管线;
26.图5至图7示出了用于渲染3d场景的光线行进方法的非限制性示例;在这种情况下,一种光线行进方法,其中光线从查看3d场景的虚拟相机投影,其中对于每条光线,该技术涉及沿光线方向行进,并且在每个步骤中,评估表示场景的数学方程以计算距离表面上最近点的距离;
27.图8示出了非限制性平台架构图;在这种情况下,平台架构图包括软件套件,其具有模型和模拟设计者使用的呈现模块、保存模块、模拟模块和打印模块、3d打印机设备和云计算系统;
28.图9示出了用于过程建模应用的图形用户界面(gui)的概述的非限制性示例;在这种情况下,gui的概述包括中央视口、显示当前场景的csg树表示的窗口、包括过程对象的场景库和显示当前选择的过程对象的属性的窗口;
29.图10示出了用于过程建模应用的gui的非限制性示例;在这种情况下,gui允许用户选择过程对象,其中提供用于用户编辑过程对象的属性的界面元素;
30.图11示出了用于过程建模应用的gui的非限制性示例;在这种情况下,gui允许用户选择纹理,其中提供格式和预览;
31.图12示出了用于过程建模应用的gui的非限制性示例;在这种情况下,gui允许用户从场景库中拖拽过程对象并将其放入过程对象编辑器以开始编辑过程对象的属性;
32.图13示出了用于过程建模应用的gui的非限制性示例;在这种情况下,gui允许用户查看在视口中描绘的选定过程对象(立方晶体)的可编辑属性,并从立方晶体创建多个晶胞;
33.图14示出了用于过程建模应用的gui的非限制性示例;在这种情况下,gui允许用户为立方晶体过程对象的每个面设置链路并设置面上的链路的位置以形成例如螺旋体;
34.图15示出了用于过程建模应用的gui的非限制性示例;在这种情况下,gui允许用户将编辑的过程对象(螺旋体单体)保存在场景库中;
35.图16示出了用于过程建模应用的gui的非限制性示例;在这种情况下,gui允许用户识别场景库中保存的过程对象,其中编辑的对象(螺旋体单体)从创建它的过程对象继承属性,并且其中gui还允许用户复制过程对象以形成晶格,例如螺旋体晶格;
36.图17示出了流程图的非限制性示例;在这种情况下,流程图说明了用户与应用交互以从先前创建的对象创建、编辑和保存过程对象的过程;
37.图18示出了流程图的非限制性示例;在这种情况下,流程图说明了用户与应用交互以创建和编辑新的过程对象的过程;
38.图19示出了晶胞的示意图的非限制性示例;在这种情况下,示意图说明了晶胞的特征命名法,例如面、链路和管道;
39.图20示出了用于过程建模应用的gui的非限制性示例;在这种情况下,gui示出了要在3d场景模型中执行的模拟的设置;
40.图21示出了用于过程建模应用的gui的非限制性示例;在这种情况下,gui示出了在3d场景模型中执行的模拟结果;
41.图22示出了架构图的非限制性示例;在这种情况下,切片器和打印机同步模块的架构图;
42.图23示出了3d打印机设备的示意性结构图的非限制性示例;在这种情况下,3d打印机设备的示意性结构图包括lux光束生成元件、准直透镜、单片mla和一系列投影透镜,其中一个投影透镜由压电台铰接;
43.图24示出了示出投影透镜的压电台移动及其对lux光束扫描路径的影响的图的非限制性示例;在这种情况下,扫描路径展示了具有螺旋图案的半连续砖打印工艺;
44.图25a至图25c示出了示出投影透镜的压电台移动及其对lux光束的影响的非限制性示例图;在这种情况下,像素场内lux光束的x-y平面像素位移;
45.图26示出了示出砖打印工艺的图的非限制性示例;在这种情况下,对象通过半连续砖打印工艺打印;
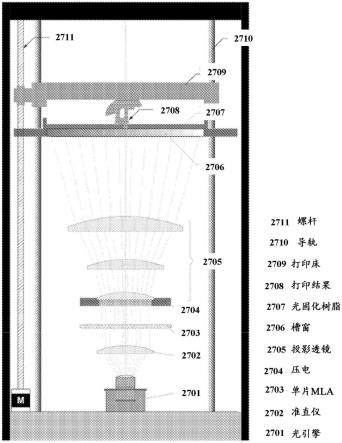
46.图27示出了3d打印机设备的示意性结构图的非限制性示例;在这种情况下,能够产生打印结果的3d打印机设备的示意性结构图包括光引擎、准直仪、单片mla、压电元件、一系列投影透镜、料盘窗、一定体积的光固化(例如光固化)树脂、打印床以及导轨和螺杆;
47.图28示出了用于3d打印设备的光引擎的非限制性示例;
48.图29示出了用于3d打印设备的幅度调制元件的非限制性示例;
49.图30a示出了微透镜的非限制性示例;在这种情况下,单个双凸微透镜;
50.图30b示出了mla的结构图的非限制性示例;在这种情况下,mla包括平面基板和应用于基板的每个最大面对平面的微透镜阵列;
51.图30c示出了mla的光学图的非限制性示例;在这种情况下,光学图包括通过第一微透镜阵列、基板和第二微透镜阵列的光路;
52.图31示出了用于3d打印设备的压电台的非限制性示例;
53.图32示出了处理(例如,计算)设备的非限制性示例;在这种情况下,设备具有一个或多个处理器、存储器、存储装置和网络接口;
54.图33a至图33f示出了将微型模块组装成宏观结构的示例示意图;图33a示出了微型模块的示例;图33b示出了将微型模块组装成示例三维矩阵的示例;图33c示出了三维矩阵的示例;图33d示出了三维矩阵的示例层;图33e至图33f示出了包括多个三维层的示例组件;
55.图34a至图34f示出了各种形状的层组件的示例,例如正方形和类似正方形的组件形状;
56.图35a至图35f示出了连接到示例馈送电路的模块层的示例;
57.图36示出了空心棱锥形状的示例层;
58.图37a和图37b提供了空心棱锥形状的生长示例;
59.图38示出了空心棱锥形状的外部馈送电路的示例;
60.图39示出了层状宏观结构的示例;
61.图40示出了具有馈送电路的层状宏观结构的示例;
62.图41示出了示例宏观结构;
63.图42示出了示例馈送和收集布置;
64.图43a至图43e示出了示例连接系统;图43a示出了包括细胞芯片模块和流体源之间的连接器的示例连接系统的概述;图43b示出了具有输入针和输出针的示例连接系统;图43c示出了由示例连接器系统进行的示例连接;图43d示出了连接系统的示例实施方式,其中针穿透示例细胞芯片模块中的腔室;图43e示出了示例连接系统,其中针穿透第二腔室;
65.图44示出了细胞生长、储存、环境优化和放大生产的示例方法的示意图;
66.图45示出了球形结构相对于其半径的立方生长速率;
67.图46a和图46b示出了示例球形生物反应器及其组件的截面图;
68.图47示出了球形生物反应器的示例;
69.图48示出了示例生物反应器的内部微型模块或构建块的示例以及配置用于生物反应器中的流体流动的内部组件,例如通道、管道和腔室;
70.图49示出了根据本公开的方法和系统的结构的数学表示;
71.图50示出了根据本公开的方法和系统的结构的数学表示和几何表示;
72.图51a和图51b示出了可以根据本公开的方法构建的示例结构,例如形状或微型模块;
73.图52示出了示例3d球形宏观结构及其体素化表示;
74.图53示出了本文提供的多个连接器的示例结构;
75.图54示出了具有微光圈阵列和微透镜阵列的示例3d打印机光学配置;
76.图55a和图55b示出了包括二次波长发生器的3d打印机设备的示例示意图;
77.图56a和图56b示出了包括料盘窗上的涂层的3d打印机设备的示例示意图;
78.图57a和图57b示出了3d打印生物反应器的示例打印工艺和数字渲染;图57a示出了示例打印工艺;图57b示出了3d打印生物反应器的数字渲染和作为位置高度的函数的横截面图;和
79.图58示出了示例3d打印机设备和打印生物反应器。
具体实施方式
80.本文提供了用于打印对象的系统、方法和设备。系统、设备和方法可以包括用于3d打印对象的设备和方法。
81.除非另有定义,否则本文使用的所有技术术语具有与本主题所属领域的普通技术人员通常理解的相同含义。如在本说明书和所附权利要求中使用的,单数形式“一”、“一个”和“该”包括复数引用,除非上下文另有明确规定。除非另有说明,否则本文对“或”的任何提及旨在涵盖“和/或”。
82.每当术语“至少”、“大于”或“大于或等于”在一系列两个或多个数值中的第一个数
值之前,术语“至少”、“大于”或“大于或等于”适用于该系列数值中的每个数值。例如,大于或等于1、2或3等价于大于或等于1、大于或等于2或大于或等于3。
83.每当术语“不大于”、“小于”或“小于或等于”在一系列两个或多个数值中的第一个数值之前,术语“不大于”、“小于”或“小于或等于”适用于该系列数值中的每个数值。例如,小于或等于3、2或1等价于小于或等于3、小于或等于2或小于或等于1。
84.如本文所用,术语“单体”通常是指具有晶体结构的完全对称性的最小重复单元(参见,例如,图1的105)。
85.如本文所用,术语“晶格”通常是指具有三维图案的单元,其在重复时产生晶体结构(参见,例如,图1的110)。
86.如本文所用,术语“螺旋体”通常是指不包含直线的连接的周期性最小表面。这样的表面可能具有数学上无限数量的连接。在一些示例中,螺旋体是schwarz p和d表面的关联族的唯一非平凡嵌入成员,关联角约为38.01
°
。螺旋体可以被配置为单螺旋体或双螺旋体。双螺旋体可以针对微流体设备中的特定应用进行定向和配置。双螺旋体可以通过平衡与在微型模块和宏观结构(例如,宏观形状)中观察到的流体动力学性能相关的几何方面来配置,例如双螺旋体晶体结构和空间群。螺旋体或双螺旋体可以以多种晶体结构实现。
87.如本文所用,术语“生产生物反应器”或“生物反应器”通常是指适用于规模化生产细胞和/或由细胞产生的产品的生物反应器设备。生产生物反应器可以包括用于输入细胞,用于提供液体介质、气体成分和其他细胞环境因素的一个或多个通道或其他开口,以及用于收获细胞和/或由细胞产生的产品的一个或多个通道。
88.如本文所用,术语“培养介质配制器”通常是指用于混合成分以用作生长细胞的培养基的组件或设备。
89.如本文所用,术语“微型模块”通常是指生物反应器的一部分,其可以互连并组装成更大的结构(例如,宏观结构或宏观形状)以构成生物反应器的至少一部分或全部。
90.如本文所用,术语“螺旋体”通常是指不包含直线的连接的周期性最小表面。这样的表面可能具有数学上无限数量的连接。在一些示例中,螺旋体是schwarz p和d表面的关联族的唯一非平凡嵌入成员,关联角约为38.01
°
。螺旋体可以被配置为单螺旋体或双螺旋体。双螺旋体可以针对微流体设备中的特定应用进行定向和配置。双螺旋体可以通过平衡与在微型模块和宏观结构(例如,宏观形状)中观察到的流体动力学性能相关的几何方面来配置,例如双螺旋体晶体结构和空间群。螺旋体或双螺旋体可以以多种晶体结构实现。
91.如本文所用,术语“无气泡”通常是指生物反应器或其他设备,其具有基本上层状或层状流体流动,从而没有气泡或基本上没有气泡。无气泡生物反应器通常不具有可在流体中生成气泡的混合元件,例如动叶片、翅片、螺旋桨等。
92.本文提供了用于3d打印的设备和系统。该设备可以包括立体光刻3d打印设备。还提供了将此类设备用于诸如3d打印之类的应用的方法。立体光刻设备可以包括光学组件。光学组件可以是静态光学组件。或者,在一些示例中,光学组件可以是动态光学组件。该设备还可以包括光引擎,该光引擎可以被配置为投影一个或多个光束。光束可以包括或者是lux光束。光束(例如lux光束)可以包括一个或多个像素。一个或多个像素可以包括多个像素。一个或多个像素可以沿着轴(例如,z轴)定位。
93.设备和/或光学组件还可包括一个或多个透镜。一个或多个透镜可以包括准直透
镜。透镜(例如,准直透镜)可以被配置为准直lux光束。在一些示例中,光学组件可以包括微透镜阵列(mla)。mla可以被配置为将准直的lux光束聚焦到修改的光束上,该修改的光束与lux光束相比可以具有更小的直径。在一些情况下,该修改的光束可以是最终光束。或者,该修改的光束可以不是最终光束,例如,它可以是中间光束,并且可以进一步生成更多光束。在一些示例中,可以将lux光束的一个或多个像素(例如,lux光束的每个像素)划分成多个子像素,这些子像素可以倍增修改的光束和/或最终光束的分辨率。
94.该设备还可以包括微光圈阵列(mda),其可以被配置为减少mla的透镜之间的噪声和/或串扰。
95.该设备还可以包括至少一个投影透镜和可移动台,该可移动台可以被配置为在平面中平移至少一个投影透镜中的一个或多个。该平面可以是二维(2d)平面,例如空间中的平面。2d平面可以是空间中两个轴之间的平面。该空间可以是多维空间,例如三维(3d)空间。例如,平面可以是x轴和y轴之间的平面(例如,x-y平面)。或者,该平面可以是x-z平面或y-z平面。该平面可以由两个向量定义,其中每个向量可以与空间中的两个轴平行。例如,平面可以是x-y平面,并且光引擎、准直透镜、mla、至少一个投影透镜和光学组件的可移动台之间沿着z轴(或垂直于平面的任何其他轴)的距离可能是固定的。或者,在一些情况下,距离可能不是固定的,并且可能会随着时间而改变。
96.该设备还可以包括打印料盘。打印料盘可以包括打印台。在一些示例中,打印台可以是固定的。在一些示例中,打印台可以是可移动的。打印台可被配置为在空间中沿着任何方向或沿着任何轴移动。台的移动可以在笛卡尔坐标、极坐标、球坐标或任何其他坐标系中定义。在一些示例中,打印台可以被配置为在笛卡尔坐标系中的3d空间中沿着x轴、y轴和/或z轴移动(例如,可以是可移动的)。在一些示例中,台可以沿着多于一个轴移动。在一些示例中,台可以被配置为在极坐标系或球坐标系中的示例圆的角度或半径的方向上旋转和/或移动。
97.该设备,例如该设备的打印料盘,还可以包括控制电路。控制电路可以被配置为控制一个或多个设备组件,例如光引擎、可移动台和/或打印台,以例如通过立体光刻3d打印实现给定目标,例如打印对象。
98.在一些示例中,本文还描述了计算机系统和计算机实现的系统和方法,其可以包括一个或多个处理器以及一个或多个存储器。计算机系统可以包括可由至少一个处理器执行并且可以创建应用的指令。该应用可以包括建模,例如过程建模。
99.过程建模应用可以包括图形用户界面(gui)。图形用户界面可以包括视口。诸如过程建模应用的方法和系统还可以包括呈现模块。呈现模块可以被配置为呈现场景。在一些示例中,场景可以表示为符号距离函数,并且可以通过利用光线行进来渲染场景。
100.呈现模块可以包括场景库。场景库可以包括一个或多个过程对象(po)。呈现模块还可以包括场景编辑器。场景编辑器可以允许用户将一个或多个po添加到场景和/或为场景创建构造几何(例如,构造立体几何(csg))树。呈现模块还可以包括过程对象(po)编辑器,其可以允许用户编辑可能已经添加到场景中的po的属性。呈现模块还可以包括模拟编辑器,其可以允许用户配置场景的一个或多个模拟。呈现模块还可以包括打印编辑器,其可以允许用户配置场景以进行打印。
101.方法和系统,例如呈现模块还可以包括模拟模块。模拟模块可以被配置为进行一
个或多个模拟。模拟可以在场景中进行。该方法和系统,例如呈现模块还可以包括打印模块。打印模块可以被配置为生成切片文件队列并将切片文件传输到3d打印机。3d打印机可以包括或者是本文其他地方提供的设备或系统或另一设备或系统。
102.本文提供了可以用指令编码的非暂时性计算机可读存储介质。指令可以由至少一个处理器执行,例如,以创建过程建模应用。
103.过程建模应用可以包括图形用户界面(gui)。gui可以包括视口和呈现模块。呈现模块可以被配置为将场景表示为例如符号距离函数,并且可以通过利用光线行进来渲染场景。呈现模块可以包括场景库。
104.场景库可以包括一个或多个过程对象(po)。呈现模块还可包括场景编辑器,其可允许用户将一个或多个po添加到场景和/或创建构造几何,例如用于场景的构造立体几何(csg)树。呈现模块可以包括可以允许用户编辑添加到场景的每个po的属性的过程对象(po)编辑器、可以允许用户配置场景的一个或多个模拟的模拟编辑器和可以允许用户配置用于打印的场景的打印编辑器、可以被配置为进行场景的一个或多个模拟的模拟模块以及可以被配置为生成切片文件队列并将切片文件传输到3d打印机等设备的打印模块。3d打印机可以是本文其他地方提供的设备或系统,或者是另一设备或系统。
105.本文提供了用于过程建模的计算机实现的方法。用于过程建模的计算机实现的方法可以包括提供过程建模应用。过程建模应用可以包括场景库。场景库可以包括一个或多个过程对象(po)。过程建模应用还可以包括场景编辑器,其可允许用户将一个或多个po添加到场景和/或创建几何图形,例如用于场景的构造立体几何(csg)树。过程建模应用还可以包括过程对象(po)编辑器,其可以允许用户编辑po(例如,添加到场景的每个po)的属性。过程建模应用还可以包括模拟编辑器。模拟编辑器可以允许用户配置场景的一个或多个模拟。过程建模应用可以包括打印编辑器,该打印编辑器可以允许用户配置用于打印的场景、将场景表示为符号距离函数、通过利用光线行进来渲染场景、在场景中进行一个或多个模拟、生成切片文件队列,和/或将切片文件传输到3d打印机。3d打印机可以是本文其他地方提供的设备或系统,或者是另一设备或系统。
106.本文提供了制造诸如2d或3d对象的多维对象的方法。在一些情况下,多维对象(例如,3d对象)可以包括一个或多个单元。在一些示例中,一个或多个单元可以包括多个单元或多个单元。在一些示例中,这些单元可以包括或者是重复的或重复的单元。该方法可以包括:提供过程建模应用。过程建模应用可以根据本文其他地方提供的过程建模应用或另一过程建模应用。过程建模应用可以被配置为执行一个或多个功能。在一些示例中,可以根据可以向应用提供输入或指令的用户的请求来执行功能。或者,可以使用人工智能、机器学习或其他技术来执行一个或多个功能。
107.在一些示例中,过程建模应用可以被配置为将一个或多个单元添加到场景。该场景可以是多维场景。场景(例如,多维场景)可以包括任意数量的维度,例如1、2、3、4、5、6、7或更多。在一些示例中,单元可以是结晶单元。例如,可以将结晶单元添加到场景(例如,3d场景)中。该方法还可以包括复制一个或多个单元(例如,结晶单元)以形成结构。该结构可以包括或者是晶格。例如,该结构可以包括场景中的晶格。该方法还可以包括和配置可以连接单元(例如,复制的结晶单元)的链路和/或连接。该结构还可包括一个或多个管道。管道可以连接链路。该方法可以包括为场景创建构造立体几何(csg)树。该方法还可以包括将3d
场景表示为符号距离函数、通过利用光线行进来渲染场景、生成切片文件队列和/或将切片文件传输到诸如立体光刻3d打印设备的3d打印设备等的设备。该设备可包括本文其他地方提供的任何设备、其他设备或其任何组合。
108.当可视化和操纵任何虚拟场景时,要关注的事情可以是包括在场景或其中的任何结构中的几何形状或多个几何形状的表示。可以用来解决这个问题的方法的示例可以包括使用显式表示和/或隐式表示。
109.在一些示例中,在显式表示中,几何形状可以存储为几何图元的列表。几何图元可以包括具有任何形状的任何尺寸的几何图元。例如,几何图元可以包括点、三角形、多边形或其他几何图元。几何图元可以包括一个或多个维度,例如1、2、3、4、5、6、7或更多维度。在一些示例中,几何图元可以包括n维,其中n是n维空间中从0到无穷大的整数。
110.在一些情况下,显式表示可能不需要转换来提取用于打印的3d可表示模型,并且它可以允许对模型进行局部操作,例如逐个顶点。在一些情况下,显式表示可能包含缺点。缺点显式表示的示例可能包括固定由顶点分布建立的最大详细程度,丢失几何形状的固有信息(在一些情况下,可能仅由几个几何图元列表表示),与执行全局操作相关的困难,并且缺乏对完整场景的紧凑数据表示的定义。例如,在一些情况下,完整场景的数据表示可能不紧凑并且可能例如在存储器上占用很大的空间。广泛使用的显式表示的示例可以包括几何图元,例如多边形和/或三角形。在一些示例中,表面可以例如使用光栅化被划分或细分,并被渲染。
111.在隐式表示中,几何形状可以存储为可以在流形上定义的数学函数或方程。隐式表示可以从提取打印所需信息的机制中受益,并且可以促进模型的局部或全局操作。隐式表示可以包括几个优点。例如,隐式表示可能无法固定给定的详细程度,并且可能提供获得无限详细程度的可能性。隐式表示可能不会导致丢失几何形状的固有信息。在隐式表示中进行全局操作可能很方便。在一些示例中,数据可以是紧凑的并且例如与显式表示方法相比可以占用更少的磁盘空间。
112.行进立方体/四面体:该技术包括将整个场景的隐式表示转换为其显式表示。这不太适合大场景,因为它在转换后失去了隐式表示的数据紧凑性。
113.光栅化:在过去的几十年中,该技术已广泛用于实时计算机图形,因为它具有良好的性能和多功能性,以实现足够好的视觉效果。渲染的运行时间复杂度通常与需要绘制的三角形数量呈线性关系。另一方面,问题的时空复杂度与表示整个场景所需的顶点数量呈线性关系。
114.参考图2,提供了示例光栅化管线。在该示例中,光栅化管线以3d网格205开始。在第一示例顶点处理步骤210中,主机程序用顶点阵列填充api的顶点缓冲存储器。这些顶点通常在全局坐标中定义;因此,它们被转换为相机-空间坐标。现在可以将顶点投影到屏幕坐标。这种转换从3d相机-空间坐标到2d屏幕系统坐标。在该示例中,顶点现在被解释为屏幕空间215中的2d三角形。在第二示例光栅化步骤220中,三角形被转换为像素片段225。在第三示例光栅操作步骤230中,片段根据期望的照明技术以及可选的纹理过滤被着色,以产生彩色片段235。最后,在该示例中,片段处理步骤240产生最终图像输出245。
115.这个过程,有时称为“图形管线”,通常在硬件中实现,但可以通过称为“着色器”的中间步骤进行操作。在过去的二十年期间,这个图形管线得到了改进,以最大化可绘制的三
角形数量。光栅化具有重要的性能考虑;具体来说,算法的执行时间复杂度与顶点数量成线性关系,因为所有顶点都需要进行测试才能产生最终图像。需要注意的是,这可以通过使用aabb对场景中的元素进行排序来降低到复杂度的对数阶;尽管如此,时间复杂度仍然与场景中的元素数量密切相关。因此,该算法不能很好地扩展。也就是说,这种方法因其易于使用gpu进行并行化而广受欢迎。
116.光线追踪(光线投射):在本文描述的即时方法中,在一些示例中,光线追踪被用作渲染方法,其具有优于光栅化的关键优势。现代gpu已经发展成为今天高度可编程的并行浮点处理器。这种多线程在多个数据源(mtmd处理器)上同时执行的新范例为传统众所周知的光线投影渲染技术打开了新机遇的大门。
117.参考图3,提供了示例光线追踪图。与光栅化管线不同,该方法从光栅图像310的像素开始,以产生沿着相机截头体305拍摄光线以找到每条光线/像素覆盖场景的那个部分。一些光线可能会命中320场景315中的对象,有些可能会未命中325。
118.参考图4,提供了示例光线行进方法。在这个示例中,对于屏幕中的每个像素,一条光线被追踪405穿过场景,通常它是通过使用bvh来完成的。此外,在该示例中,如果光线与任何对象相交415,则计算并保存命中420。在遍历整个结构410之后,算法评估425光线是否命中表面435或430,如果是,则计算颜色,或者从期望位置投射附加光线。光线追踪和晶格
119.晶格是有序的点阵列,描述了形成晶体的粒子的排列。粒子排列中的这种顺序提供了有用的属性,这些属性有利于改善渲染技术的执行时间。光线行进
120.该技术涉及确定整个场景的正交投影与单个平面的相交。通常,3d打印机只需要一组有限的层,通常只有一层。一旦打印工艺开始,它就可以一次更新一层;因此,无需在开始打印工艺之前存储场景的整个表示。使用符号距离函数(sdf)的隐式表示非常适合这些任务,因为提取3d场景与平面的交点很简单。
121.这种技术可能类似于光线投影,但它可以用于完全从单个数学方程生成完全过程化的环境。这个想法是改变场景的抽象表示和渲染技术,以将它们组合在可以处理更好的空间和执行时间复杂度的方法中。场景现在表示为数学函数,例如sdf。由于晶格是由有序排列的粒子组成的,因此找到这样的函数并非不可能。sdf在空间中获取一个点并计算该点与表面的距离。
122.示例:以下函数在二维中描述了一个圆:
123.//params:
124.//p:arbitrary point in 3d space
125.//c:the center of our sphere
126.//r:the radius of our sphere
127.float sphere_distance(in vec3 p,in vec3 c,float r)
128.{
129.return length(p-c)-r;
130.}
131.为了渲染场景,该技术从正在观看该场景的虚拟相机射出光线(参见,例如图5)。
对于光栅图像的每个像素,该技术沿着该光线方向行进(参见,例如图6),并在每个步骤中,评估sdf以计算它与表面上最近点的距离(参见,例如图7)。
132.光线行进带来显着的性能改进。由于在使用光线行进时,整个场景被表示为单个数学方程,因此执行时间复杂度不依赖于场景中对象的数量,而是依赖于sdf的复杂度。在分析空间复杂度时,很明显场景可以用单个数学函数来描述,不需要用顶点来离散场景。这可以大大减少存储场景所需的空间,同时保留数学函数继承的原始几何形状的细节。
133.这些性能改进在对晶格进行建模时被放大,晶格由相同单体结构的有序重复组成。为了实现必要的重复量,在一些示例中,本文描述的渲染套件没有单独指定每个单体位置,而是相反地,在这样的示例中,为了表示整个晶体结构,建立了数学方程。过程建模应用
134.参考图8,在特定实施方式中,过程建模应用具有包括呈现模块、保存模块、打印模块和模拟模块的架构。在该实施方式中,应用架构也可操作地与云计算系统以及至少一个3d打印装置(例如本文描述的3d打印设备)通信。
135.继续参考图8,在该实施方式中,呈现模块包括具有被配置为由模型设计者用户使用的工具的套件。被配置为由模型设计者用户使用的工具的非限制性示例包括场景库、过程对象(po)编辑器和场景编辑器。在本实施方式中,场景编辑器允许用户访问打印编辑器和模拟编辑器的特征。
136.在一些示例中,过程建模应用的呈现模块包括场景库。在进一步的示例中,场景库包括一个或多个可用于添加到场景的po。在各种示例中,场景库中的po包括与应用一起预先制作和提供的、由用户从头创建的、由用户通过编辑其他po的属性创建的、从外部源加载的po等。在特定实施方式中,用户可选地通过从场景库中拖拽表示po的图标并将其放到视口或表示场景的呈现模块的其他特征中来将po添加到场景。
137.在一些示例中,过程建模应用的呈现模块包括po编辑器。在进一步的示例中,po编辑器允许为每个po创建和编辑po文件。在进一步的示例中,po编辑器提供允许用户编辑场景库中的每个po和/或添加到场景的每个po的一个或多个属性的特征。可编辑po属性的非限制性示例包括类型、比例、位置、用于连接到一个或多个相邻po的链路(包括每个链路的类型、比例、形状和位置)、连接链路的管道(包括每个管道的类型、比例、形状、路径和位置)以及复制属性,例如复制数量、复制模式、复制密度等。
138.在一些示例中,过程建模应用的呈现模块包括场景编辑器。在进一步的示例中,场景编辑器允许为场景创建和编辑项目文件。在更进一步的示例中,场景编辑器提供允许用户将一个或多个po添加到场景的特征。在更进一步的示例中,场景编辑器为场景创建构造立体几何(csg)树并在构建和修改场景时更新csg树。在特定实施方式中,场景编辑器提供允许用户复制具有精确指定的比例、图案、密度等的结晶单元以在场景中形成晶格的特征。
139.在一些示例中,过程建模应用包括保存模块。在进一步的示例中,po文件由项目文件引用并且项目文件由打印文件引用。在更进一步的示例中,po文件、项目文件和/或打印文件由保存模块存储在项目数据库中,该项目数据库与允许搜索、检索文件等的本地文件系统通信。
140.仍然参考图8,在该实施方式中,呈现模块还包括被配置为供模拟设计者用户使用的工具,该模拟设计者用户可以是与模型设计者用户相同的用户或不同的用户,以及过程
建模应用包括模拟模块。被配置为供模拟设计者用户使用的工具的非限制性示例包括模拟编辑器。在进一步的示例中,模拟编辑器提供允许用户配置场景的一个或多个模拟的特征。在更进一步的示例中,模拟编辑器生成并维护模拟输入文件,该模拟输入文件结合场景和项目信息被模拟模块摄取以利用云计算资源进行模拟。
141.许多类型的模拟适用于本文描述的过程建模应用。作为非限制性示例,合适的模拟包括微流体模拟、计算流体动力学(cfd)模拟和结合符号距离函数的格子玻尔兹曼方法(lbm)以求解cfd模拟。在特定示例中,模拟模块提供模拟的一个或多个特征的可视化,例如性能特征。
142.仍然参考图8,在该实施方式中,呈现模块包括打印编辑器并且过程建模应用包括打印模块。在一些示例中,打印编辑器允许为场景创建和编辑打印文件。在进一步的示例中,打印编辑器提供允许用户配置用于打印的场景的特征。在更进一步的示例中,作为非限制性示例,打印编辑器提供允许用户配置表面轮廓、打印机执行顺序、层厚度、lux光束曝光时间和像素分辨率的特征。在一些示例中,打印模块通过切片器从打印编辑器中摄取打印文件和其他信息以及模拟信息以产生切片文件。在进一步的示例中,文件服务器将切片文件提供给一个或多个3d打印设备内部或外部的缓存。图22提供了示例切片器/打印机同步架构。图形用户界面
143.在一些示例中,过程建模应用包括gui以呈现允许一个或多个用户访问应用功能的元素和特征。
144.参考图9,在特定实施方式中,本文描述的过程建模应用包括gui,该gui包括中央视口、显示当前场景的csg树表示的窗口、包括过程对象的场景库以及显示当前选定的过程对象的属性的窗口。
145.在一些示例中,本文描述的过程建模应用包括允许用户访问多个功能的gui,作为非限制性示例,包括允许用户选择过程对象,其中用于用户的界面元素编辑过程对象的属性(参见,例如图10)允许用户选择纹理,其中提供格式和预览(参见,例如图11)允许用户拖拽来自场景库的过程对象并将其放入过程对象编辑器以开始编辑过程对象的属性(参见,例如图12),允许用户查看在视口中描绘的选定过程对象(立方晶体)的可编辑属性,并从立方晶体创建多个晶胞(参见,例如图13),允许用户为立方晶体过程对象的每个面设置链路并设置面上链路的位置以形成,例如,螺旋体(参见,例如图14),允许用户在场景库中保存已编辑的过程对象(螺旋体单体)(参见,例如图15),并允许用户在场景库中识别保存的过程对象,其中已编辑的对象(螺旋体单体)从创建它的过程对象继承属性,并且其中gui还允许用户复制过程对象以形成晶格,例如螺旋体晶格(参见,例如图16)。
146.参考图19,提供了晶胞的示意图,包括命名法。图示的命名法包括术语“面”1910、“对称面”1920、“链路”1915和“管道”1905。
147.在各种进一步的示例中,本文描述的过程建模应用包括允许用户访问多个模拟功能的gui,作为非限制性示例,包括允许用户设置要在3d场景模型(参见,例如图20)中执行的模拟并允许用户查看在3d场景模型中执行的模拟结果(参见,例如图21)。示例过程
148.参考图17,在特定实施方式中,为用户提供与应用交互以从先前创建的对象创建、
编辑和保存过程对象的过程。在这个实施方式中,用户从场景库1705中选择po,在这种情况下,立方晶体po。接下来,用户通过右键单击po来选择po并从选项菜单1710中选择“复制”。结果,新的立方晶体po被添加到场景库1715中。然后用户可以选择新po 1720并将新po重命名为“螺旋体晶格”1725。接下来,用户可以为po 1730上的每对对称面设置多个链路,还可以设置多个管道1735。最后,在这个示例过程中,用户使用管道1740连接来自不同面的一组链路,以完成晶格内的流体连接。
149.此外,参考图18,在特定实施方式中,为用户提供与应用交互以创建和编辑新的过程对象的过程。在这个实施方式中,用户通过从场景库1805拖拽po来开始该过程。然后用户将po放到位置1810。如果位置无效,则用户必须重新开始。
150.继续参考图18,如果位置有效,并且用户已经将po拖放到编辑器视口中,则将新po添加到场景库1815。随后,用户可以选择新po1820并且默认属性浏览器示出po的变量1825。用户可以选择随机变量1830并可选地改变变量值1835。如果该值是可接受的,则改变该值1840。
151.继续参考图18,如果位置有效,并且用户没有将po拖放到编辑器视口中,则将新节点添加到场景1845的csg树并且将新po添加到场景库1850。然后用户可以选择新节点1855并且属性浏览器示出节点变量1860。用户可以选择随机变量1865并且可选地改变变量值1870。如果该值是可接受的,则改变该值1875并且改变在视口1880中可视化。3d打印设备
152.在一些示例中,本文所述的3d打印设备包括静态光学组件。在进一步的示例中,静态光学组件包括光引擎,其被配置为沿着z轴投影包括多个像素的lux光束;至少一个准直透镜,其被配置为准直lux光束;微透镜阵列(mla),其被配置为将准直lux光束聚焦到较小直径的最终光束,其中lux光束的每个像素被细分为多个子像素以倍增最终光束的分辨率;微光圈阵列(mda),其被配置为减少mla透镜之间的噪声和串扰;至少一个投影透镜;以及可移动台,其被配置为在x-y平面中平移至少一个投影透镜中的一个或多个。在进一步的示例中,关于静态光学组件,沿着z轴在光引擎、准直透镜、mla、至少一个投影透镜和静态光学组件的可移动台之间的距离基本上是固定的或是固定的。
153.参考图23,在特定实施方式中,立体光刻3d打印设备包括支撑设备的其他组件并限定z轴的框架结构。在本实施方式中,3d打印设备还包括静态光学组件。从底部开始沿着z轴向设备顶部前进,静态光学组件包括lux光束发生器、准直仪、单片mla、压电台和至少一个投影透镜。此外,在该实施方式中,步进电机驱动螺杆,螺杆调整包括打印台的打印料盘在z轴上的位置。其他组件包括线性导轨、滚珠丝杠、控制电子设备等。最后,在该实施方式中,静态光学组件被配置为将像素场投影到打印台上。切片器/打印机同步架构
154.在一些示例中,过程建模应用通过切片器/打印机同步设备、设备或管道将打印指令传送到一个或多个3d打印设备。许多硬件和/或软件架构适用于生成和管理切片文件队列,这些切片文件指示例如立体光刻3d打印装置。在一些示例中,本文描述的过程建模应用将打印指令传送到一个3d打印设备。在其他示例中,本文描述的过程建模应用以串行或并行方式向多个3d打印设备传送打印指令。在进一步的示例中,多个3d打印设备可以包括例如2、3、4、5、6、7、8、9、10、20、30、40、50、60、70、80、90、100或更多个3d打印设备,包括其中的
增量。
155.参考图22,在特定实施方式中,切片器/打印机同步架构包括过程建模应用的呈现模块的打印编辑器2205。在该实施方式中,打印编辑器2205生成并维护打印文件2210,该打印文件2210被发送到切片器2215。切片器2215生成切片队列2220,该切片队列2220被发送到文件服务器2225,用于通过“最新切片信号”与3d打印机2230进行协调。此外,在该实施方式中,打印机2230通过同步门2230生成发送的“切片继续信号”,同步门2230生成“迭代信号”以形成到切片器2215的反馈回路。在各种示例中,切片器2215和/或文件服务器2225可以是单独的设备,可以彼此组合,和/或可以与3d打印机2230集成。半连续打印:砖打印工艺
156.在一些示例中,本文描述的3d打印设备包括控制电路,其被配置为至少控制光引擎、可移动台和打印台以实现立体光刻3d打印。在进一步的示例中,控制电路被配置为控制打印台以预定的恒定速度在z轴上移动。在进一步的示例中,控制电路被配置为控制可移动台以在x-y平面中平移至少一个投影透镜中的一个或多个。
157.在各种示例中,本文所述的3d打印设备包括控制电路,该控制电路被配置为至少控制光引擎、可移动台和打印台以实现半连续、基本连续或连续模式的立体光刻3d打印。在特定示例中,本文描述的3d打印设备被配置为执行半连续打印工艺。在进一步的示例中,半连续打印工艺包括砖打印工艺。
158.在一些示例中,控制电路被配置为控制可移动台以在x-y平面中平移至少一个投影透镜中的一个或多个,从而以预定义的图案扫描lux光束。许多图案适用于扫描lux光束,作为非限制性示例,包括逐行图案、逐列图案、交叉影线图案和由要打印的3d对象/场景的几何形状决定的图案。在一些示例中,预定义的图案包括连续的空间填充曲线。在进一步的示例中,预定义的图案包括sierpinski曲线。在一些示例中,预定义的图案基本上是螺旋状的图案或是螺旋状的图案。
159.在一些示例中,打印工艺基于多个技术点。在这些示例中,一点是压电台在x-y平面中的移动,用于扫描打印料盘下方的光束。在此类示例中,另一点是投影图像的每秒帧数(fps)。在这样的示例中,还有一点是打印台以预定的恒定速度沿着z轴移动。
160.在特定示例中,该工艺包括以螺旋方式扫描光束,如图24所示。在进一步的特定示例中,每帧的曝光时间由打印区域中涉及的子像素的数量定义。作为非限制性示例,如果子像素的数量为9,则第一帧将在树脂处曝光,每帧必须曝光1/9次,第二帧曝光2/9,以此类推,直到它完成最后一帧。在这样的示例中,该工艺对被照亮的每个像素重复。在一些示例中,作为非限制性示例,照明图案的扫描由在x-y平面中移动的压电台递送到每侧约1、2、3、4、5、6、7、8、9、10、11、12、13、14、15、16、17、18、19、20、21、22、23、24、25、26、27、28、29、30或更多μm。在此示例中,通过所述扫描,可以利用连续打印方法和静态设置的优势以非常高分辨率在树脂上“写入”。在一些示例中,打印料盘具有对氧气半渗透和/或基本上可渗透的底部材料。在这样的示例中,打印料盘对氧气的渗透性允许抑制聚合反应。图24示出了螺旋形路径中的压电移动。
161.图25a示出了压电台在x-y平面中的中性定位,其中没有由于光扫描引起的像素位移。图25b示出了由于光扫描而生成向左的像素位移的压电台在x-y平面中的向右定位。图25c示出了由于光扫描而生成向右的像素位移的压电台在x-y平面中的向左定位。图26示出
了示例砖打印工艺期间的一系列步骤。示例3d打印设备实施方式
162.参考图27,在特定实施方式中,来自光引擎2701的光被投影到准直仪2702。在侵入准直仪之后,光到达单片mla 2703。单片mla2703聚焦准直光束,导致较小直径的最终光束。在本实施方式中,这是本文描述的静态光学设置的分辨率增强的关键支柱。具体取决于所需的打印分辨率,一个像素的区域现在可以细分为例如9、25或49个子像素,甚至多达7498个子像素,以及4到7498之间的任何增量。一旦光束被mla 2703聚焦,通过压电台2704在透镜的x-y平面中的移动来执行光扫描。压电台2704使光束能够扫描更大的区域。所有子像素的直径都被放大,并通过一系列三个投影透镜2705投影在扫描区域内的料盘窗2706上。这种构象和放大是由位于光路中mla2703之后的投影透镜2705产生的。在该示例实施方式中,估计最终打印区域约是90mm
×
85mm的初始区域的4倍。打印料盘包含光固化树脂2707。当光固化树脂2707被光引擎的uv光激活时,在打印床2709上逐层生成打印结果,例如3d对象,并且打印床2709通过由步进电机驱动的螺杆2711在导轨2710上向上推进。光引擎
163.在一些示例中,本文所述的3d打印设备包括光引擎。在一些示例中,光引擎是基于数字微镜器件(dmd)技术的uv光源。在其他示例中,光引擎是基于硅上液晶(lcos)技术的uv光源。在一些示例中,光引擎包括uv投影仪和/或深uv投影仪。在一些示例中,光引擎具有约350、355、360、365、370、375、380、385、390、395、400、405、410、415、420、425、430、435、440、445或450nm的操作波长,包括其中的增量。在一些示例中,光引擎具有选择为在打印料盘中引发光固化树脂聚合的操作波长。
164.本文描述的第一示例光引擎方法基于dmd技术。在一些示例中,该方法使用了工作在405nm或380nm操作波长的工业uv投影仪(lux光束)。光引擎照亮通向包含光敏树脂的料盘的光路。在该方法的进一步示例中,光的空间调制由dmd执行,该dmd由基于铝基微米尺寸反射镜阵列的机电设备组成。光由uv led投影到微型反射镜上,并由激活的反射镜反射。每个反射镜都有两种状态:“打开”和“关闭”。当它们打开时,它们可以反射入射光。每个微型反射镜代表一个像素。在这种方法的一些示例中,dmd的像素间距为5.4μm。在一些示例中,光引擎的工作距离为177.8毫米,对应的像素间距例如为35μm,面积为90
×
50mm2。在一个实施方式中,lux光束具有2560
×
1600像素的分辨率和7w的输出。在一些示例中,在工作距离处的lux光束的辐照度为150mw/cm2。图28示出了合适的lux光束的非限制性示例。
165.本文描述的第二示例光引擎方法基于lcos技术。在一些示例中,lcos负责空间光调制(基于幅度)。在进一步的示例中,lcos包括位于顶部的lcd面板和位于背板的反射镜。lcd启用像素,其中入射光可以撞击后镜并被反射到光路直到料盘。在示例中,lcos的像素间距可以是3.5μm,并且可以具有4k
×
2k(4096
×
2400)像素的分辨率。图29示出了合适的lcos的示例。
166.在一些示例中,本文所述的3d打印设备包括被配置为投影第一操作波长的第一光引擎和被配置为投影第二操作波长的第二光引擎。在一些示例中,第二光引擎与第一光引擎并行操作,并且选择第二操作波长以抑制打印料盘中的光固化树脂的聚合。在一些示例中,第二光引擎投影与第一光引擎投影的图像互补且相反的图像,以提高打印对象的保真度和准确性。
准直仪
167.在一些示例中,本文所述的3d打印设备包括准直仪。在一些示例中,准直仪包括一个或多个准直透镜。准直仪是将入射的发散光束转换为平行光束的光学透镜或多个透镜。lux光束具有非准直光束。光束准直对于确保光照度的均匀分布是必要的。准直透镜的许多光学布置都是合适的。在一些示例中,准直仪包括一个准直透镜。在其他示例中,准直仪包括多个准直透镜。在一些示例中,多个准直透镜包括例如布置成准直透镜组件或系统的2、3、4、5、6、7、8、9、10或更多个准直透镜。微透镜阵列(mla)
168.在一些示例中,本文所述的3d打印设备包括mla。在一些示例中,mla是包括微米尺寸透镜的方形封装阵列的光学设备(参见例如图30a)。mla可以位于光引擎中、光引擎之前或光引擎之后。许多类型的微透镜适用于mla并决定了阵列的属性。作为非限制性示例,mla包括双凸阵列、双凹阵列、单凸阵列、单凹阵列或它们的组合。在特定实施方式中,mla包括单片双凸阵列。
169.参考图30b,在特定实施方式中,mla包括平面基板,其中第一微透镜阵列mla1固定在一侧,第二微透镜阵列mla2固定在相对侧。在该实施方式中,在基板的任一侧上,聚合物层也位于基板和每个微透镜阵列之间。此外,在该特定实施方式中,mda位于基板和微透镜阵列之一(例如,mla2)之间。
170.许多材料适用于基板,作为非限制性示例,包括硼硅酸盐、蚀刻玻璃或它们的组合。类似地,许多材料适用于微透镜,作为非限制性示例,包括聚合物、玻璃(例如,浮法硼硅酸盐玻璃或其他能够承受热应力的高度透明的玻璃)或它们的组合。在特定实施方式中,主基板由硼硅酸盐制成,而微透镜由聚合材料制成。
171.参考图30c,在特定实施方式中,每个光束通过mla的面对透镜的路径聚焦lux光束的每个像素。
172.在各种示例中,mla将lux光束的每个像素细分为4到7498个子像素。例如,在各种示例中,mla将lux光束的每个像素细分为约4、8、32、64、128、256、512、1024、2048、4098或更多个子像素,包括其中的增量。
173.在特定示例实施方式中,mla包括单片双凸微透镜阵列,每个微透镜具有30μm间距。在这个特定实施方式中,mla的尺寸是:l:139.12mm,w:88.24mm,和h:1.1mm。此外,在本实施方式中,曲率半径(roc)估计为130μm,矢状高度为1.5μm。最后,在此示例中,mla将lux光束的每个像素细分为9、25或49个子像素。微光圈阵列(mda)
174.在一些示例中,本文所述的3d打印设备包括一个或多个mda。在进一步的示例中,一个或多个mda被配置为减少穿过mla的透镜的光束之间的噪声和串扰。在这样的示例中,一个或多个mda的微光圈被编号并对齐以对应于mla的微透镜。在一些示例中,一个或多个mda的每个微光圈具有约5、10、15、20、25、30或更多μm的孔径尺寸,包括其中的增量。在其他示例中,多个mda中的一个的每个微光圈具有小于或等于约30、35、30、15、10、5或更小μm的孔径尺寸,包括其中的增量。减小一个或多个mda的微光圈的孔径尺寸可以增加对比度并提供更高分辨率的打印。然而,减小一个或多个mda的微光圈的孔径尺寸又可以减少提供给树脂用于聚合的能量的量。因此,在一些示例中,一个或多个mda的每个微光圈具有约5至10、5
至15、5至20、5至25、5至30、10至15、10至20、10至25、10至30、15至20、15至25、15至30、20至25、20至30或25至30μm的孔径尺寸。在示例中,一个或多个mda的每个微光圈具有从约10到15μm的孔径尺寸。
175.在一些示例中,本文所述的3d打印设备包括一个mda。在一些示例中,本文所述的3d打印设备包括多个mda。本文所述的3d打印设备适当地包括2、3、4或更多个mda。静态光学组件内的许多位置都适用于mda。作为非限制性示例,mda可以位于mla内和/或组件内的其他地方。在一些示例中,mda可以位于mla的平面基板和mla的多个微透镜之一或两者之间。在一些示例中,mda和mla可以被布置为彼此相邻。在一些示例中,mda和mla可以被布置为彼此相邻并且被布置为与lcos相邻。在另一示例中,mda和mla可以布置在lux光束路径中远离lcos的位置处。在另一示例中,3d打印设备包括至少一个mda,但不包括mla。在另一示例中,3d打印设备包括至少一个mda和被配置为聚焦准直lux光束的晶体。晶体可以是在所用波长下具有大工作温度范围和高透射率的玻璃基板,例如33硼硅酸盐玻璃。
176.图54示出了具有mda和mla的示例3d打印机光学配置。3d打印机光学器件可以包括光引擎5401,光引擎5401被配置为生成一个或多个光束(例如,uv光束)。由光引擎5401生成的光束可以被引导到偏振分束器(pbs)5402。pbs 5402可以将光引导到波片(例如,四分之一波片)5403。光学器件还可以包括mda 5404和mla5406,其安置在波片5403和lcos 5406之间。在示例中,mla 5405可以安置在mda 5404和lcos 5406之间。光束可以穿过波片5403、mda 5404和mla 5405以从lcos 5406的背面反射并通过作为多个离散光束的mla 5405、mda 5404和波片5403返回。在接触pbs5402时,光束可以以至少约45、60、90、135度的入射角被反射。在示例中,光被pbs 5402以约90度的角度反射。反射光可以穿过一个或多个投影透镜5407以在打印料盘窗5408的一侧生成微点5409。微点5409可以允许与打印料盘窗5408接触或布置在其附近的树脂聚合。可移动台
177.在一些示例中,本文所述的3d打印设备包括可移动台。在进一步的示例中,可移动台具有基于压电效应的操作原理,例如压电可移动台。在一些示例中,可移动台被配置为以纳米分辨率在x-y平面中平移一个或多个投影透镜,以便在打印区域上扫描lux光束。
178.许多行程范围适用于本文所述的可移动台。作为非限制性示例,合适的行程范围在x方向上包括约10、20、30、40、50、60、70、80、90、100、200、300、400、500、600、700、800、900、1000μm或更大,包括其中的增量。作为非限制性示例,合适的行程范围在y方向上包括约10、20、30、40、50、60、70、80、90、100、200、300、400、500、600、700、800、900、1000μm或更大,包括其中的增量。在一些示例中,可移动台是压电台并且具有在x方向上100μm和在y方向上100μm的行程范围。在进一步的具体示例中,工作频率在khz范围内。
179.许多行程增量适用于本文所述的可移动台。作为非限制性示例,合适的行程增量在x方向上包括约10、20、30、40、50、60、70、80、90、100、200、300、400、500、600、700、800、900、1000nm或更大,包括其中的增量。作为进一步的非限制性示例,合适的行程增量在x方向上包括约1、2、3、4、5、6、7、8、9、10、11、12、13、14、15、16、17、18、19、20、21、22、23、24、25、26、27、28、29、30μm或更多,包括其中的增量。作为非限制性示例,合适的行程增量在y方向上包括约10、20、30、40、50、60、70、80、90、100、200、300、400、500、600、700、800、900、1000nm或更大,包括其中的增量。作为进一步的非限制性示例,合适的行程增量在y方向上包括约
1、2、3、4、5、6、7、8、9、10、11、12、13、14、15、16、17、18、19、20、21、22、23、24、25、26、27、28、29、30μm或更多,包括其中的增量。
180.在一些示例中,可移动台在x、y或x和y两个方向上的行进(平移)分辨率小于或等于光引擎的每个像素被分成的子像素的长度。
181.图31示出了合适的压电台的非限制性示例。投影透镜
182.在一些示例中,本文所述的3d打印设备包括一个或多个投影透镜。在进一步的示例中,本文所述的3d打印设备包括一个投影透镜。在一些示例中,本文所述的3d打印设备包括多个投影透镜,作为非限制性示例,2、3、4、5、6、7、8、9、10个或更多个投影透镜。在这样的示例中,投影透镜可以布置成投影透镜组件或系统。
183.在一些示例中,一个或多个投影透镜是透镜的同心设置,其主要目的是配置光束的最终构象以确保在打印料盘处能量和光束空间质量的良好分布。投影透镜由非球面透镜组成,旨在满足特定打印分辨率的质量要求。在一些示例中,一个或多个投影透镜扩展最终打印区域。在一些示例中,一个或多个投影透镜将最终打印区域扩展至约2x、3x、4x、5x、6x、7x、8x、9x、10x、20x、30x、40x、50x、60x、70x、80x、90x、100x或更多光引擎的光生成区域,包括其中的增量。在一些示例中,一个或多个投影透镜减小了最终打印区域。打印料盘
184.在一些示例中,本文所述的3d打印设备包括打印料盘(printing vat)。在一些示例中,料盘是在立体光刻3d打印工艺中使用的光敏树脂容器。在一些示例中,料盘底部的材料对氧气是可渗透的或半渗透的,以能够终止光聚合。在一些示例中,打印料盘被配置用于无菌3d打印并且光固化树脂保持在无菌状态。打印料盘可包括一个或多个光学透明表面(例如料盘窗)。一个或多个光学透明表面可以允许lux光束从光引擎传输通过打印料盘的一部分以聚合光固化树脂。光学透明表面(例如,料盘窗)的非限制性示例包括玻璃或光学透明聚合物,例如环状烯烃共聚物。第二波发生器
185.在一些示例中,3d打印设备可以包括第二波发生器。第二波发生器可邻近打印料盘的光学透明表面的一端安置(例如,邻近料盘玻璃的一端安置)。第二波发生器可以将光束投影到料盘的光学透明表面的一端(例如,料盘窗),使得光束在光学透明表面的长尺寸内和沿着光学透明表面的长尺寸进行全内反射。全内反射可以生成渐逝场,该渐逝场在光学透明表面的外部传输并穿过与光学透明表面相邻安置的树脂。渐逝场可以减少、基本上防止或防止安置为邻近或接触打印料盘表面的光固化树脂的聚合,以减少或防止聚合树脂粘附到打印料盘窗的表面。渐逝场可在距打印料盘窗表面约10、20、30、50、75、100、125、150、200或更多纳米范围内减少或防止聚合。在示例中,渐逝场在距打印料盘的光学透明表面约100nm内减少或防止聚合。光的波长投影到光学透明表面(例如,料盘窗)和内部反射以允许全内反射的空气入射角和临界折射角可以由等式1和2确定。允许全内反射的空气入射角和临界折射角可以由等式1和2确定。
186.其中nr是树脂的折射率,ng是光学透明表面(例如,料盘窗)的折射率,并且na是空
气的折射率。光束的波长可以是减少或抑制聚合的任何波长的光。例如,光束的波长可以是uv波长(例如,从约350到约450nm)或可以是红色波长(例如,从约600到650nm)。光束的波长可以是至少约350、355、360、365、370、375、380、385、390、395、400、405、410、415、420、425、430、435、440、445或450nm,包括其中的增量。光束的波长可以是至少约575、580、585、590、595、600、605、610、615、620、625、630、635、640、645、650、655、660、665、670、675或更多nm,包括其中的增量。在示例中,光束的波长可以从约375nm到400nm。在另一示例中,第二光束的波长可以从约600nm到650nm。光束的波长可以大于或小于但不等于用于聚合树脂的波长。
187.图55a和图55b示出了包括二次波长发生器的3d打印机设备的示例示意图。参考图55a,来自光引擎5501的光被投影到准直仪5502。在侵入准直仪之后,光到达mla 5503。mla 5503聚焦准直光束,导致较小直径的一个或多个光束。一旦光束被mla 5503聚焦,通过压电台5504在透镜的x-y平面中的移动来执行光扫描。压电台5504使光束能够扫描更大的区域。所有子像素的直径都被放大,并通过一系列三个投影透镜5505投影在扫描区域内的料盘窗5506上。这种构象和放大是由位于光路中mla 5503之后的投影透镜5505产生的。打印料盘包含光固化树脂5507。当光固化树脂5507被光引擎的uv光激活时,在打印床5509上逐层生成打印结果5508,例如3d对象,并且打印床5509通过由步进电机驱动的螺杆5511在导轨5510上向上推进。3d打印设备包括二次波发生器5512,其被配置为将光束5513投影通过料盘窗5506的长尺寸。图55b示出了二次波发生器5512和料盘窗5506界面的放大示意图。投影通过料盘窗5506的长尺寸的光束5513经历全内反射以生成减少或抑制与料盘窗5506的表面接触或邻近的树脂的聚合的渐逝场。光束5513的光源可以是led或激光器。第二波发生器可以包括一个或多个透镜,该透镜被配置为对光进行塑造或引导以允许光束5513的全内反射。打印料盘涂层
188.在一些示例中,3d打印设备可以包括布置在料盘窗或打印料盘的其他表面上的一种或多种涂层,以减少、基本上防止或防止聚合树脂粘附在料盘窗上。涂层可以是在界面处抑制聚合或以其他方式包括抗粘附特性的任何涂层类型。在示例中,涂层是中孔涂层。中孔涂层可包括一种或多种基础化合物,例如但不限于金属氧化物、二氧化硅、有机硅、碳、金属-有机骨架、沸石或其任何组合。可以使用溶胶-凝胶化学、物理沉积技术、浸涂、旋涂或任何其他涂层工艺来施加涂层。
189.涂层可以具有可用于减少或防止聚合树脂的粘附的任何厚度。例如,涂层可以具有至少约5、10、25、50、75、100、125、150、175、200或更多nm的厚度。涂层可具有约5到10、5到25、5到50、5到75、5到100、5到125、5到150、5到175、5到200、10到25、10到50、10到75、10到100、10到125、10到150、10到175、10到200、25到50、25到75、25到100、25到125、25到150、25到175、25到200、50到75、50到100、50到125、50到150、50到175、50到200、75到100、75到125、75到150、75到175、75到200、100到125、100到150、100到175、100到200、125到150、125到175、125到200、150到175、150到200、175到200nm的厚度。在示例中,涂层具有约25到100nm的厚度。涂层可具有直径为约2至50nm的孔。孔间距离可以从约5到10、5到15或5到20nm变化。在示例中,孔间距离的范围为5到20nm。涂层可具有至少约10、15、20、25、30、40、50或60度的接触角。在示例中,涂层具有至少约25度的接触角。
190.图56a和图56b示出了包括料盘窗上的涂层的3d打印机设备的示例示意图。参考图56a,来自光引擎5601的光被投影到准直仪5602。在侵入准直仪之后,光到达mla 5603。mla 5603聚焦准直光束,导致较小直径的一个或多个光束。一旦光束被mla 5603聚焦,通过压电台5604在透镜的x-y平面中的移动来执行光扫描。压电台5604使光束能够扫描更大的区域。所有子像素的直径都被放大,并通过一系列三个投影透镜5605投影在扫描区域内的料盘窗5606上。这种构造和放大由位于光路中mla 5603之后的投影透镜5605产生。打印料盘包含光固化树脂5607。当光固化树脂5607被光引擎的uv光激活时,在打印床5609上逐层生成打印结果5608,例如3d对象,并且打印床5609通过由步进电机驱动的螺杆5611在导轨5610上向上推进。3d打印设备包括布置在料盘窗5606表面上的涂层5612。图56b示出了涂层5612和料盘窗5506界面的放大示意图。涂层5512布置在接触树脂的料盘窗5506的表面上。涂层可以减少或防止聚合树脂粘附到料盘窗5606的表面。打印床(台)
191.在一些示例中,本文所述的3d打印设备包括打印床。在一些示例中,可光固化树脂在打印台的表面上进行光聚合。打印台铰接以在电路的控制下沿z轴移动以实现打印工艺。例如,打印台可以组装在导杆上并安装到由步进电机驱动的螺杆上。在一些示例中,本文描述的3d打印设备使用自下而上的打印方法,并且打印台相应地在z轴上移动。在一些示例中,本文所述的3d打印设备使用自上而下的打印方法,并且打印台相应地在z轴上移动。示例3d对象/场景
192.本文提供的平台、系统和设备(统称为“打印机系统”)适用于基于以周期性方式空间分布的晶体几何形状的多孔结构的打印。在示例中,使用打印机系统来生成这样的结构。在一些示例中,晶体几何形状可以包括或者是基于单体的晶格。单体可以包括形状。单体的形状可以是任何形状,例如本文别处描述的形状。在示例中,单体的形状可以包括螺旋体、双螺旋体或修改的螺旋体或修改的双螺旋体。对于3d打印目的,在一些情况下,螺旋体可能是合适的几何形状,因为它是自支撑的,避免了为制造包括所述结构的3d对象添加外部支撑。在一些示例中,多孔结构包括直径范围为150μm至600μm的通道和在其较薄点处范围为200μm至400μm的膜间空间(例如,分隔两个独立电路的材料)。在这些示例中,为了获得足够的细节水平,每个边缘需要15μm的体素,以确保在300μm尺寸级别的结构上平滑终止。体素越小,宏观上的表面越平滑。
193.本文提供的打印机系统也可适用于生物反应器的打印。在一些示例中,打印机系统用于生成生物反应器,例如微型化生物反应器。在一些示例中,生物反应器由多个微型模块组成。每个微型模块可以具有一种形状,并且这些微型模块可以被布置,即打印成宏观结构。本文还提供了具有各种宏观结构和微型模块的此类生物反应器的示例。本文提供的生物反应器包括各种宏观结构、不同形状的各种微型模块和本文别处详述的各种特征。本文还提供了制造和使用此类生物反应器的方法。
194.在一些示例中,本文的打印机系统可以生成定义尺寸的微型模块,例如,使得结构的一个或两个通道(例如,联结到宏观结构(例如生物反应器或生物反应器的层)中的一个微型模块和/或多个微型模块)适应一组大小的对象的流动(例如,生物有机体和细胞的流动)。在一个实施方式中,该结构的至少一个通道被构造为限制在任何一点流过通道的细胞数量,例如单个细胞的流动,而不是多个细胞一起流动。在一些示例中,通道直径略大于单
个细胞,例如通道比单个细胞的直径宽约5%、10%、15%、20%、25%、30%、35%或40%,包括其中的增量。在一些示例中,细胞在约0.5μm和约100μm之间。在一些示例中,细胞是原核细胞并且单个细胞在约0.5μm和约5μm之间。在一些示例中,细胞是微生物,例如细菌、酵母、真菌,并且细胞在约0.5μm和约30μm之间,或在约3μm和约30μm之间。在一些示例中,细胞是真核细胞并且单个细胞在约10μm和约100μm之间,或在约10μm和约30μm之间。
195.在一些示例中,可以将微型模块打印成具有约8μm到2000μm的通道直径。在一些示例中,将微型模块打印成具有40μm到9797μm的边缘。在本文的示例中,将微型模块打印成具有约68417到9.4x10
11
立方微米的体积。
196.在一些示例中,微型模块可以具有规则的立方体包裹结构,其边缘的长度为“l”。l可以与扫描直径有关。在一些示例中,l等于微通道的扫描直径的三分之二,乘以二的平方根,乘以三的平方根。如果在微型模块内两个组件的半径相同,则对应于液体组分的微通道的总表面积和总体积可以等于气体成分的相应尺寸。在一些示例中,组件的半径可以不同。在一些示例中,当两个半径相等时,微通道半径不能大于扫描半径的0.7倍。两个不同面的两个微型模块之间的最短距离等于扫描半径乘以二的平方根,减去每个组件通道半径之和。
197.在一些示例中,具有dg的第一通道的面积可以等于dg内的第二通道的面积,并且其中基质相的面积是第一通道的面积和第二通道的面积的和。分隔通道的基质相与每个通道的中心之间的距离是恒定的。
198.在一些示例中,打印机系统可以打印宏观结构中的一系列微型模块。在一些示例中,微型模块是修改后的双螺旋体(dg),其组装成宏观结构以创建3d对象,例如生物反应器。在一些示例中,微型模块可以在宏观结构内布置成层。相同定向的互连微型模块的组合称为“层”。例如,该层可以布置成菱形形状,使得在一些示例中,如果相同数量的模块在选定的方向上连接,则所得的生长是不成比例的,因此层的生长对于彼此是不规则的。在一些示例中,该层被布置成正方形或使得所得的生长成比例。
199.在一些示例中,微型模块层的组件(“第一矩阵”)可以与微型模块层的第二组件(“第二矩阵”)共同定位,由此第二矩阵占据由第一矩阵留下的自由空间,因此占据相同体积的矩阵没有接触点并保持恒定的最小距离。
200.在一些示例中,微型模块可以组装成空心棱锥宏观结构。在一些示例中,空心棱锥宏观结构可以制造本文其他地方提供的空心棱锥生物反应器。空心棱锥可以具有空心体积和增加的横截面。在一些示例中,空心棱锥的层间体积可能会增加(这是在流动方向上一层和下一层之间添加的微型模块的数量),并按(i)其外周边的边缘之间的交替生长感;和(ii)其内周边的增加(即内部空心的周边)排序。例如,如果n是空心棱锥外周边的边缘之一的模块数,n是构成空心棱锥内周边的边缘之一的微型模块数,那么如果在一层,n=(8;8),则n=(4;4)。这个逻辑在每一层并且顺时针方向(考虑流动方向)的棱锥外边缘之间交替重复。结果是阶梯棱锥,它的阶梯形成多面螺旋。内周边也有螺旋生长,但频率低于外周边,内周边的生长方向与外周边相反。
201.在一些示例中,本文提供了用于生成层状宏观结构的方法和系统(例如,3d打印设备、其他系统,例如硬件、软件和本文其他地方提供的任何方法、系统或材料)。在一些示例中,层状宏观结构可以用作层状生物反应器。在一些示例中,生物反应器采用由多个微型模
块组成的层状宏观结构。微型模块可以是dg或可以包括其他形状。层状宏观结构具有由微型模块组成的恒定厚度和增加横截面的片材。层状的恒定厚度允许物质均匀地进入生物反应器,例如从馈送电路。层间体积的增加(这是在流动方向上一层和下一层之间添加的模块数)可以由生物反应器确定,并且可以通过片材的最短边缘之间的交替生长感来排序。在层状宏观结构中,可以有一个或多于一个的片材,例如平行排列的2、3、4、5、6、7、8或多于8个片材。每个片材之间的空间可用于放置馈送电路或其馈送片材中的模块的部分。
202.在一些示例中,本文提供的方法和系统可用于制作树,例如棋盘宏观结构。棋盘宏观结构可以制成棋盘生物反应器。在一些示例中,任何形状的微型模块(例如,dg或本文其他地方提供的任何其他微型模块形状)可以组装成树形棋盘宏观结构,其具有至少一个恒定横截面的空心柱,其纵向穿过微型模块的层。在一些示例中,树形棋盘宏观结构具有1、2、3、4或多于4个这样的柱。柱可用于提供一个区域以通过沿着纵向柱的通道传输液体介质和其他物质。
203.在一些示例中,本文提供的3d打印系统和方法,例如打印机系统,可以提供具有高分辨率的连续可打印表面的能力,例如构建具有包含重复微型模块的宏观结构的生物反应器。在一些示例中,打印表面可多达约320mm
×
320mm。在一些示例中,打印表面多达约320mm
×
320mm,每个1x1x1 mm打印区域的完全饱和立方体容纳多达约14.616个微型模块(例如,诸如dg或修改的dg)。在一些示例中,打印体积多达约320mm
×
320mm
×
1000mm(打印体积的x、y、z坐标),并且打印体积容纳多达约1,496,704,035个或更少的微型模块。尽管在许多示例中,3d打印的方法、设备和系统用于制造生物反应器,但此类3d打印方法、设备和系统可用于制造任何对象,例如任何3d对象。同样,即使在许多示例中,诸如生物反应器的反应容器是使用本文所述的3d打印系统和方法制造的,但在其他示例中可以使用其他方法制造此类生物反应器。
204.本文提供了用于使用诸如3d打印(其可包括使用本文其他地方提供的方法和系统)的技术构建3d对象的方法。在一些示例中,本文提供的方法和/或系统可用于构建可具有各种应用的3d结构。在一些情况下,要构建或制造的3d结构可以包括部件、组件、部分或单元,例如子单元或模块,在一些情况下,它们可以被组装以制造结构或对象。例如,3d对象可以是反应容器或生物反应器。生物反应器可以是根据本文其他地方提供的任何生物反应器。生物反应器可以包括一个或多个微型模块。生物反应器的微型模块可以组装成宏观结构。宏观结构可以是本文提供的生物反应器的宏观结构。
205.在一些示例中,在本公开的方法中,可以通过连续和/或有序矩阵在数学上描述空间。矩阵可以包括任何数量的维度,例如1、2、3、4、5、6、7、8或更多。在示例中,矩阵可以是3d矩阵。该空间可以是3d空间。在一些情况下,矩阵可以是连续且有序的,例如连续且有序的三维(3d)矩阵。矩阵可以划定可以放置元素的可用空间,以根据它们占据的空间的要求对空间进行功能化。该方法可以使用计算机来实现。本文提供了一种可用于执行本公开的方法的计算机系统。在一些示例中,方法可以包括计算机实现的方法,例如软件、代码或一组指令以执行本文所述的方法。这样的方法可以在本文别处更详细地解释。
206.在一些情况下,微型模块可以组装成结构(例如,宏观结构),以提供对结构(例如,生物反应器)中的介质和气体流动和分布的目标控制。在其他示例中,可以实现相同的方法来制造多个部件、单元、组件、模块或微型模块,以构建除反应器或生物反应器之外的结构。
使用本文提供的方法或系统制成的3d对象、结构或模块可以包括各种应用。
207.在一些示例中,微型模块可以包括形状或结构。形状或结构可以包括本文其他地方提供的任何形状或结构。在示例中,微型模块的形状或结构可以包括修改的双螺旋体(dg),其可以组装成宏观结构以产生本文提供的生产生物反应器。图33a至图33f示出了从第一微型模块(例如,dg)开始组装并组装额外的微型模块,使得几何形状被重复以形成三维(3-d)矩阵,其生长可能被限制到三个可能维度中的两个。一个微型模块到另一微型模块的连接点可以称为“口”。可以相同定向的互连微型模块的第一组件被称为“层”。例如,该层可以布置成菱形形状,使得在一些示例中,相同数量的模块在选定的方向上连接,所得的生长不成比例,因此层的生长相对于彼此不规则。在一些示例中,该层可以布置成正方形或使得所得的生长成比例。图37d至图37f示出了层组装和生长的一个示例。层组装和生长可以在任何方向发生。
208.微型模块可以是生物反应器的较大结构的构建块。微型模块可以通过组装多个较小的单元来构建,例如单体,其可以是可用于定义空间或空间中的结构的体素。单体可以包括形状。微型模块的形状可以包括任何形状,例如任何几何形状和任何尺寸。微型模块可以是结晶单元,其可用于排列或定义空间。例如,其空间或特性可以由于单体的存在或不存在或其在空间中的位置而被定义、构造或成形。例如,在空间的给定区域中,可以提供高密度的示例单体或体素来定义或制造固体对象。例如,大量的单体或体素可能位于小区域内,因此,该区域可能是单体或体素密集的区域,并且可能被定义为或被用户、实体、软件、机器或人工智能(ai)感知为实心结构,例如具有给定厚度的墙壁。在另一示例中,单体在给定区域中可能是稀疏的。在这种情况下,可以组装单体或体素以形成空心空间、基本空隙空间、通道、孔等。例如,可以组装多个合适形状的单体以制造微型模块或构建块,例如管道,或空心室,例如生物反应器的空心室(例如,室4840)。本文提供了构建此类构建体的方法。构建此类构建体的方法可以由计算机系统实现,例如本文提供的软件组件、ai、机器学习、其他计算机实现的方法及其任何组合。在一些示例中,计算机实现的方法可以提供一组指令(例如,可执行指令),这些指令可以由本文提供的设备使用以3d打印给定结构,例如本文提供的生物反应器。
209.微型模块可以由多个较小单元(例如,体素或单体)的组件构成。在一些示例中,根据本公开的方法,微型模块可以由可用于定义和/或排序空间(例如,3d空间)的晶胞组成。单体的形状可能属于给定的类别。一类单体或晶胞的示例可包括原始的、以体为中心的、以面为中心的、以侧为中心的、其他类别以及它们的组合。单体的形状的示例可以包括立方体、球形、矩形、棱锥、螺旋体、双螺旋体、三斜形、单斜形、斜方形、三角形、六边形或任何其他几何形状。单体的形状可以包括布拉菲晶格(bravais lattice)。布拉菲晶格可包括本文提供的形状。表1.1中提供了单体或晶胞的布拉菲晶格和形状的示例。单体可以用作体素来排序或生成空间并制作微型模块。
表1.1:三维的布布拉菲晶格
210.晶胞或单体可以包括一个或多个元素,在一些示例中,包括有限数量的元素。一个元素可以是一组可以被赋予意义的坐标。元素的示例可以包括点、轴、适当的轴、不适当的轴、中心、平面或其他元素。在一些示例中,单体和元素的组装可以形成结构,例如宏观结构或微型模块。在示例中,这样的组件可以形成空心圆柱体,该空心圆柱体可以被配置为允许诸如气体或液体的流体流动。例如,单体、元素和/或它们的组合的组件可以制造本文所述的生物反应器的通道、管道、腔室或另一微型模块或构建块,例如通道(例如,通道4820、4810,或本文其他地方提供的任何其他通道)。在一些示例中,单体和元素的组装可以形成实心结构,例如实心壁、实心块或其他结构。
211.在一些情况下,单体内(例如,晶胞内或晶体内)的元素排列对于最小化或尽可能避免所考虑的体积或结构(由这些单体和/或元素组装制成)内功能连续性的潜在破坏可能很重要。在一些示例中,单体和/或元素的布置可以通过示例数学指令、方程或公式来执行,其可以包括数学函数、数学运算和/或数学运算符。这种数学运算符的一个示例可以是对称运算符。
212.数学运算符通常可以被称为映射或函数,其可以作用于第一空间(例如,3d空间)的元素以产生另一空间的元素。在一些情况下,第二空间可以与第一空间相同。运算符可以包括可以作用于向量空间的线性映射。在一些情况下,运算符可以保留空间和/或元素的属性,例如它们的连续性。运算符可以是线性运算符、有界运算符或其他类型的运算符。可以对元素执行的操作的示例可以包括平移运算符、旋转运算符、反转运算符、反射运算符和恒等运算符。可用于执行本公开的方法的示例运算符可以是对称运算符。
213.在一些示例中,生物反应器的微型模块可以包括双螺旋体或修改的双螺旋体形状。双螺旋体(dg)包括两个螺旋体并且可以包括两个相互生长的非重叠域。修改的双螺旋体(dg)可以包括两个相互生长的非重叠域,这些域可以由两个由基质相隔开的恒定平均曲率(cmc)表面界定。修改的双螺旋体结构可以包括对未修改的双螺旋体的连接的微小修改,以便使该结构适应给定的宏观结构或功能。修改可以包括阻塞连接或交叉点的一部分(例如,“口”),修改结构的一个或两个相通道的直径,或者完全或部分消除存在于dg结构中的任何相通道。dg或修改的dg可以包括与第二螺旋体结构交织的第一螺旋体结构。两个通道可以例如通过多孔膜分开。
214.在示例中,在本文提供的生物反应器中,在每一层的边缘上,单元(例如,微型模块)的未连接口可用于将该层与其他功能连接,例如用于介质流或用于气体的输入和用过的介质的输出(例如,收集层4610和/或收集通道4696)、用过的气体(例如,气体摄入通道、气体收集通道,未示出)和细胞或由细胞产生的生物产品的输出。在一些情况下,细胞或由细胞产生的生物产品的输出可能与用过的介质的输出相同或不同。
215.在一些示例中,微型模块层的组件(“第一矩阵”)可以与微型模块层的第二组件(“第二矩阵”)共同定位,由此第二矩阵可以占据由第一矩阵留下的自由空间,因此占据相同体积的矩阵可能没有接触点,并且可以保持恒定的最小距离。在进一步的示例中,可以通过将一个或多个后续矩阵(例如,第二矩阵、第三矩阵、第四矩阵、第五矩阵等)与初始矩阵共同定位来实现微型模块层的更高阶组装,由此一个或多个后续矩阵占据了初始矩阵留下的自由空间,因此占据相同体积的矩阵可能没有接触点,并且可以保持恒定的最小距离。两个矩阵的示例组装在图34a至图34f中示出。图34a示出了内接在立方体中的双螺旋体的一部分的示例。图34b示出了图34a的结构的正交剖视图。图34c和图34d示出了第二层相对于第一层的生长方向的示例。图34e示出了从棱锥中减去体积并逆时针生长的示例。图34f示出了宏观结构沿着空心棱锥的垂直轴顺时针方向生长的示例。宏观结构的示例空心棱锥宏观结构
216.在一些示例中,微型模块可以组装成空心棱锥宏观结构。空心棱锥宏观结构可以具有空心体积和增加的横截面。使用空心棱锥宏观结构,馈送电路可以服务于外部和内部周边。对于空心棱锥的构造,矩阵可以具有可以链接到分配器的初始层和可以依次连接到收集器的层。初始层的上层口的数量,以及连接到收集器的层的下层口的数量可能属于集合m=2n。这样,连接通道或树可以以平衡的方式成对分支。树可以是生物反应器的分布式结构(输入)和集合(输出)。在一些情况下,生物反应器可能没有气泡。在生物反应器和/或其模块的输入和输出中,通道可以从单个通道转变或分支到多个通道,例如到2n个通道。层间体积的增加(这是在流动方向上一层和下一层之间添加的微型模块的数量)可以由生物
反应器确定,并且可以按(i)其外周边的边缘之间的交替生长感;和(ii)其内周边的增加(即内部空心的周边)排序。例如,如果n是空心棱锥外周边的边缘之一的模块数,n是构成空心棱锥内周边的边缘之一的微型模块数,那么如果在一层,n=(8;8),则n=(4;4)(参见例如图36)。这个逻辑在每一层并且顺时针方向(考虑流动方向)的棱锥外边缘之间交替重复。结果可以是阶梯棱锥,它的阶梯形成多面螺旋。在一些示例中,内周边可以具有螺旋生长,在一些情况下,频率低于外周边,内周边的生长方向可与外周边的生长方向相反(参见图37a和图37b)。在一些示例中,内外螺旋和流动方向之间的相互作用可导致空心棱锥结构内流动介质的涡流式运动。
217.在一些示例中,生物反应器的馈送系统可以通过一个或多个通道(例如子通道)连接到生物反应器。馈送回路的子通道可以在给定层的每个面上以示例距离(例如,等效距离)围绕生物反应器中的一个或多个层的周边。子通道可以连接作为层的边缘的微型模块的一个或多个口。一组示例连接在图36a至图36f中示出。
218.在一些示例中,馈送回路可以在1、2、3、4、5、6、7、8或多于8个点处连接到生物反应器。在一个示例中,馈送回路可以服务于空心棱锥宏观结构生物反应器,并且馈送回路可以具有5个子通道的划分。这些子通道中的一个或多个可以延伸到棱锥内部通道的内部,其余的馈送子通道平行于每一层的边缘(外部通道)。馈送回路的压力和流量平衡可以通过馈送系统的外部和/或内部通道的比例来维持。用于空心棱锥形状的示例馈送电路在图38中示出。层状宏观结构
219.在一些示例中,生物反应器的宏观结构可以是层状。在一些示例中,馈送系统可以通过一个或多个子通道连接生物反应器。馈送电路的子通道可以在给定层的每个面上以等效距离围绕生物反应器中的一个或多个层的周边。子通道可以连接在作为层的边缘的微型模块的一个或多个口。一组示例连接在图35a至图35f中示出。
220.在一些示例中,生物反应器可以采用由微型模块组成的层状宏观结构。这种微型模块可以包括任何形状或结构。形状或结构可以根据本文任何地方提供的形状或结构,例如dg或其他形状。层状宏观结构具有由微型模块组成的恒定厚度和增加横截面的片材。片材的恒定厚度可以允许物质从馈送电路均匀或均匀地进入。层间体积的增加(这是在流动方向上一层和下一层之间添加的模块数量)可以由生物反应器确定,并且可以通过片材的最短边缘之间的交替生长感来排序(参见例如图39)。在层状宏观结构中,可以有一个或多于一个的片材,例如2、3、4、5、6、7、8或多于8个的片材,它们可以平行排列或以不同的构型排列。每个片材之间的空间可用于放置馈送电路或放置可以馈送片材中的模块的其一部分(参见例如图40)。棋盘宏观结构
221.在一些示例中,微型模块可以组装成树形-棋盘宏观结构,该树形-棋盘宏观结构可以具有至少一个恒定横截面的空心柱,该空心柱可以跨过(例如,纵向或沿另一方向)微型模块的层。在一些示例中,树形-棋盘宏观结构可能具有1、2、3、4或多于4个这样的柱。柱可用于提供区域以通过通道和/或沿着纵向柱的其他特征传输液体介质和其他物质。可以在结构的一个或多个或所有外表面上收集用过的介质、气体、细胞和生物产品,这可以由柱中心和面之间的压力差或使用另一种技术或力来驱动。示例树形-棋盘宏观结构在图41中
示出,并且示例馈送和收集布置在图42中示出。球形宏观结构
222.在一些示例中,微型模块可以组装成球形宏观结构。球形结构可用于制造球形生物反应器。使用多个微型模块构建球形宏观结构的示例在图52中示出。多个微型模块5210组装成3d球形宏观结构形状。
223.球形生物反应器的示例在图46a、图46b和图47中示出并在本文别处进一步详细描述。连接系统
224.模块可以通过一个或多个连接系统连接、耦合或流体连通。图43a和图43b示出了示例连接系统可以包括细胞芯片模块和流体源或流体收集模块之间的连接器。连接器可以包括支撑件和一组空心针,这些空心针可以允许流体和/或含有细胞的流体进出。在一些示例中,连接器通过针连接到第一模块,例如细胞芯片模块。细胞芯片模块可以是本文别处描述的细胞芯片模块。针可以布置成多个组,使得每组针可以包括用于输入流体的针和另一用于从细胞芯片模块输出流体的针。针的一端可用于进入细胞芯片模块中的室或通道,并且针的另一端可连接至流体源、收集设备或另一模块。
225.在一些示例中,该组针可以包括至少一个输入针和一个输出针。在一些示例中,可能存在多组针。每组针可被引导至单独的室和/或单独的通道,流体可被引导至其中以供输入或移除以供输出。
226.在一些示例中,本文提供的生物反应器系统可以包括一个或多个模块。一个或多个模块可以包括细胞芯片模块、沙箱生物反应器、生产生物反应器和/或更多模块。该设备还可以包括一个或多个连接器,该连接器可以将模块彼此连接或连接到外部部件、设备、源、模块等。例如,连接器可以将细胞芯片模块连接到一个或多个流体源,例如培养基、营养补充剂、化学输入物、胰蛋白酶、洗涤溶液/缓冲溶液,其可用于为细胞芯片模块提供流体并可选地去除用过的流体。在一些示例中,连接器可以将细胞芯片模块连接到第二模块,例如沙箱生物反应器或生产生物反应器,例如用于将细胞从一个模块转移到另一模块。
227.在示例中,连接系统还可以包括清洁室,使得针可以在进入诸如细胞芯片模块的模块之前被清洁和/或消毒。在一个示例中,清洁室可包括位于细胞芯片模块一端的一个或多个室(例如,单独的室)。在一些示例中,清洁室在第一端可以由隔膜界定,该隔膜可以容纳来自环境的清洁室并且针可以从一端穿过该隔膜进入清洁室。在一些示例中,清洁室可以在第二端由安全膜或其他边界界定,其可以在清洁室内包含清洁或消毒流体(或气体)。在这样的示例中,连接器可以在针的另一端连接到流体源,例如具有清洁剂或消毒剂和洗涤溶液的流体源。
228.在安全膜或边界的另一侧可以是通道。一旦清洁和消毒,针可以穿过安全膜或边界进入通道。通道可以是培养基通道,其将培养基从针流到细胞芯片中的其他位置。通道可以是细胞收获通道,然后可以将存在于芯片中的细胞(例如,在芯片中生长和繁殖的细胞)引导至通道,然后通过针到达单独的模块或收获组件。该通道可以是废物通道,通过该废物通道可以引导用过的介质并将其从芯片中去除。
229.图43c示出了连接器系统与包含培养基、消毒剂的组件以及废物收集和沙盒模块的连接的示例。连接管或通道从连接器系统连接,并且在一些情况下,可以利用阀门将流体
从连接器引导到适当的源、收集器或模块。
230.图43d示出了连接系统的示例,其中针穿透细胞芯片模块中的第一室,例如用于清洁和消毒或其他目的,图示了在清洁过程期间连接系统的示例,具有来自包含消毒液的组件的流体流动到在细胞芯片中的消毒室中,并具有每组针中的一个以去除用过的消毒液。
231.图43e示出了连接系统的示例,其中针在清洁/消毒之后穿透第二室。第一组针(左)可以定位成使得输入针进入培养基通道/室并且可以允许新的培养基流入细胞芯片模块。可以定位中间的一组针,以便定位一个针用于从细胞芯片模块中的通道输出用过的介质和培养废物。第三组针(右)可以定位为只有输出针进入室/通道并定位为从细胞芯片模块输出介质和细胞。用于构建生物反应器模块和其他打印对象的材料
232.本文所述的系统、组件和模块可以由多种材料制成,并且可以根据所生长的细胞和采用的细胞环境来定制这些材料。在一些示例中,组件和模块或其部分是使用本文的打印系统通过3d打印制造的。打印可以使用市售的树脂和紫外线(uv)可固化的生物相容性聚合物。在一些示例中,所使用的生物材料可以包括三种子组分、生物相容性聚合物、光引发剂和uv吸收剂的组合。
233.示例树脂包括但不限于聚己内酯(pcl)、聚乙二醇(peg)、peg-二丙烯酸酯(pegda)、聚乙二醇酸(pga)、聚乳酸(pla)、聚乳酸-乙醇酸、聚丙烯富马酸酯(ppf)、聚氨酯(pu)、聚乙烯醇(pva)、丝绸、聚(癸二酸甘油酯)丙烯酸酯(pgsa)、环氧基树脂、天然聚合物基树脂、生物陶瓷基树脂、藻酸盐基树脂、gelma基树脂、纳米复合基树脂、生物墨水和纤维素基树脂。计算机系统
234.参考图32,示出了描述示例机器的框图,该示例机器包括至少一个处理器3200(例如,处理或计算系统),其中可以在其中执行一组指令以使设备执行或实行用于本公开的静态代码调度的任何一个或多个方面和/或方法。
235.处理设备3200可以包括一个或多个处理器3201、存储器3203和存储3208,它们通过总线3240彼此通信并且与其他组件通信。总线3240还可以链路显示器3232、一个或多个输入设备3233(例如,其可以包括小键盘、键盘、鼠标、触控笔等)、一个或多个输出设备3234、一个或多个存储设备3235以及各种有形存储介质3236。所有这些元件都可以直接或通过一个或多个接口或适配器与总线3240对接。例如,各种有形存储介质3236可以通过存储介质接口3226与总线3240对接。处理设备3200可以具有任何合适的物理形式,包括但不限于一个或多个集成电路(ic)、打印电路板(pcb)、移动手持设备(例如,移动电话或pda)、膝上型计算机或笔记本计算机、分布式计算机系统、计算网格或服务器。
236.处理设备3200包括执行功能的一个或多个处理器3201(例如,中央处理单元(cpu)、通用图形处理单元(gpgpu)或量子处理单元(qpu))。处理器3201可选地包含高速缓冲存储器单元3202,用于指令、数据或计算机地址的临时本地存储。处理器3201被配置为协助执行计算机可读指令。由于处理器3201执行包含在诸如存储器3203、存储3208、存储设备3235和/或存储介质3236之类的一个或多个有形计算机可读存储介质中的非暂时性处理器可执行指令,处理设备3200可以为图32中描绘的组件提供功能。计算机可读介质可以存储可以实现本公开的方法的软件,并且处理器3201可以执行该软件。存储器3203可以从一个
或多个其他计算机可读介质(例如,大容量存储设备3235、3236)或通过诸如网络接口3220之类的合适接口从一个或多个其他源读取软件。软件可以导致处理器3201执行一个或多个过程或在此描述或图示的一个或多个过程的一个或多个步骤。执行这样的过程或步骤可以包括定义存储在存储器3203中的数据结构并按照软件的指示修改数据结构。
237.存储器3203可以包括各种组件(例如,机器可读介质),包括但不限于随机存取存储器组件(例如,ram 3204)(例如,静态ram(sram)、动态ram(dram)、铁电随机存取存储器(fram)、相变随机存取存储器(pram)等)、只读存储器组件(例如,rom3205)及其任何组合。rom 3205可用于将数据和指令单向传送到处理器3201,并且ram 3204可用于与处理器3201双向传送数据和指令。rom 3205和ram 3204可以包括以下所描述的任何合适的有形计算机可读介质。在一个示例中,基本输入/输出系统3206(bios),包括帮助在处理设备3200内的元件之间传输信息的基本例程,例如在启动期间,可以存储在存储器3203中。
238.固定存储3208可选地通过存储控制单元3207双向连接到处理器3201。固定存储3208提供额外的数据存储容量并且还可以包括本文所述的任何合适的有形计算机可读介质。存储3208可用于存储操作系统3209、可执行文件3210、数据3211、应用3212(应用程序)等。存储3208还可以包括光盘驱动器、固态存储设备(例如,基于闪存的系统),或上述任何的组合。在适当的情况下,存储3208中的信息可以作为虚拟存储器并入存储器3203中。
239.在一个示例中,存储设备3235可以通过存储设备接口3225可移除地与处理设备3200对接(例如,通过外部端口连接器(未示出))。特别地,存储设备3235和关联的机器可读介质可以为处理设备3200提供机器可读指令、数据结构、程序模块和/或其他数据的非易失性和/或易失性存储。在一个示例中,软件可以完全或部分驻留在存储设备3235上的机器可读介质中。在另一示例中,软件可以完全或部分驻留在处理器3201中。
240.总线3240连接多种子系统。在此,在适当的情况下对总线的引用可以包括用于共同功能的一条或多条数字信号线。总线3240可以是多种类型的总线结构中的任何一种,包括但不限于,使用多种总线架构中的任何一种的存储器总线、存储器控制器、外围总线、本地总线及其任何组合。作为示例而非限制,此类架构包括工业标准架构(isa)总线、增强型isa(eisa)总线、微通道架构(mca)总线、视频电子标准协会本地总线(vlb)、外围组件互连(pci)总线、pci-express(pci-x)总线、加速图形端口(agp)总线、超传输(htx)总线、串行高级技术附件(sata)总线及其任何组合。
241.处理设备3200还可以包括输入设备3233。在一个示例中,处理设备3200的用户可以通过输入设备3233将命令和/或其他信息输入到处理设备3200中。输入设备3233的示例包括但不限于,字母-数字输入设备(例如,键盘)、定点设备(例如,鼠标或触摸板)、触摸板、触摸屏、多点触摸屏、操纵杆、触控笔、游戏手柄、音频输入设备(例如,麦克风、语音响应系统等)、光学扫描仪、视频或静止图像捕获设备(例如,相机),以及它们的任何组合。在一些示例中,输入设备是kinect、leap motion等。输入设备3233可以通过各种输入接口3223(例如,输入接口3223)中的任何一个对接到总线3240,包括但不限于串行、并行、游戏端口、usb、firewire、thunderbolt或上述的任何组合。
242.在一些示例中,当处理设备3200连接到网络3230时,处理设备3200可以与连接到网络3230的其他设备通信,特别是移动设备和企业系统、分布式计算系统、云存储系统、云计算系统等。进出处理设备3200的通信可以通过网络接口3220发送。例如,网络接口3220可
以从网络3230以一个或多个分组形式(例如,网际协议(ip)分组)接收传入通信(例如来自其他设备的请求或响应)并且处理设备3200可以将传入通信存储在存储器3203中以供处理。处理设备3200可以类似地以一个或多个分组形式将传出通信(例如,对其他设备的请求或响应)存储在存储器3203中并从网络接口3220传送到网络3230。处理器3201可以访问这些存储在存储器3203中的通信分组以供处理。
243.网络接口3220的示例包括但不限于网络接口卡、调制解调器及其任何组合。网络3230或网段3230的示例包括但不限于分布式计算系统、云计算系统、广域网(wan)(例如,互联网、企业网络)、局域网(lan)(例如,与办公室、建筑物、校园或其他相对较小的地理空间相关的网络)、电话网络、两个计算设备之间的直接连接、对等网络及其任何组合。诸如网络3230之类的网络可以采用有线和/或无线通信模式。通常,可以使用任何网络拓扑。
244.信息和数据可以通过显示器3232显示。显示器3232的示例包括但不限于阴极射线管(crt)、液晶显示器(lcd)、薄膜晶体管液晶显示器(tft-lcd)、有机液晶显示器(oled)(例如,无源矩阵oled(pmoled)或有源矩阵oled(amoled)显示器)、等离子显示器及其任意组合。显示器3232可以通过总线3240与处理器3201、存储器3203和固定存储3208以及诸如输入设备3233之类的其他设备对接。显示器3232经由视频接口3222链接到总线3240,并且显示器3232和总线3240之间的数据传输可以经由图形控件3221来控制。在一些示例中,显示器是视频投影仪。在一些示例中,显示器是头戴式显示器(hmd),例如vr头戴设备。在一些示例中,作为非限制性示例,合适的vr头戴设备包括htc vive、oculus rift、samsung gear vr、microsoft hololens、razer osvr、fove vr、zeiss vr one、avegant glyph、freefly vr头戴设备等。在一些示例中,显示器是诸如本文所公开的那些设备的组合。
245.除了显示器3232之外,处理设备3200可以包括一个或多个其他外围输出设备3234,包括但不限于音频扬声器、打印机、存储设备及其任何组合。这样的外围输出设备可以经由输出接口3224连接到总线3240。输出接口3224的示例包括但不限于串行端口、并行连接、usb端口、firewire端口、thunderbolt端口,以及它们的任何组合。
246.另外,或作为替代,处理设备3200可以提供功能性,作为硬连线或以其他方式体现在电路中的逻辑的结果,其可以代替软件或与软件一起操作以执行本文描述或图示的一个或多个过程或一个或多个过程的一个或多个步骤。本公开中对软件的引用可以涵盖逻辑,并且对逻辑的引用可以涵盖软件。此外,在适当的情况下,对计算机可读介质的引用可以涵盖存储用于执行的软件的电路(例如ic)、包含用于执行的逻辑的电路或两者。本公开涵盖硬件、软件或两者的任何适当组合。
247.本领域技术人员将理解,结合本文公开的实施方式描述的各种说明性逻辑块、模块、电路和算法步骤可以实现为电子硬件、计算机软件或两者的组合。为了清楚地说明硬件和软件的这种可互换性,各种说明性组件、块、模块、电路和步骤已经在上面大体上根据它们的功能进行了描述。
248.结合本文公开的实施方式描述的各种说明性逻辑块、模块和电路可以用通用处理器、数字信号处理器(dsp)、专用集成电路(asic)、现场可编程门阵列(fpga)或其他可编程逻辑器件、分立门或晶体管逻辑、分立硬件组件或设计用于执行本文所述功能的其任何组合来实现或执行。通用处理器可以是微处理器,但在备选方案中,处理器可以是任何常规处理器、控制器、微控制器或状态机。处理器还可以实现为计算设备的组合,例如,dsp和微处
理器的组合、多个微处理器、与dsp核结合的一个或多个微处理器,或任何其他这样的配置。
249.结合本文公开的实施方式描述的方法或算法的步骤可以直接体现在硬件中、由一个或多个处理器执行的软件模块中、或两者的组合中。软件模块可以驻留在ram存储器、闪存、rom存储器、eprom存储器、eeprom存储器、寄存器、硬盘、可移动磁盘、cd-rom或本领域已知的任何其他形式的存储介质中。示例存储介质耦合到处理器,使得处理器可以从存储介质读取信息和将信息写入存储介质。或者,存储介质可以集成到处理器中。处理器和存储介质可以驻留在asic中。asic可以驻留在用户终端中。或者,处理器和存储介质可以作为分立组件驻留在用户终端中。
250.根据本文的描述,作为非限制性示例,合适的处理设备包括服务器计算机、台式计算机、膝上型计算机、笔记本计算机、子笔记本计算机、上网本计算机、网本计算机、手持计算机、互联网设备、移动智能电话和平板计算机。
251.在一些实施方式中,处理设备包括被配置为执行可执行指令的操作系统。例如,操作系统是软件,包括程序和数据,它管理设备的硬件并为应用的执行提供服务。本领域技术人员将认识到,作为非限制性示例,合适的服务器操作系统包括freebsd、openbsd、linux、mac oswindows和本领域技术人员将认识到,作为非限制性示例,合适的个人计算机操作系统包括mac和类unix操作系统(例如,)。在一些示例中,操作系统由云计算提供。作为非限制性示例,本领域技术人员还将认识到合适的移动智能电话操作系统包括os、research inblackberryblackberrywindowsos、windowsos、和非暂时性计算机可读存储介质
252.在一些示例中,本文公开的平台、系统、介质和方法包括一个或多个非暂时性计算机可读存储介质,该存储介质编码有程序,该程序包括可由可选联网的计算设备的操作系统执行的指令。在一些示例中,计算机可读存储介质是计算设备的有形组件。在一些示例中,计算机可读存储介质可选地可从计算设备移除。在一些示例中,作为非限制性示例,计算机可读存储介质包括cd-rom、dvd、闪存设备、固态存储器、磁盘驱动器、磁带驱动器、光盘驱动器、分布式计算系统(包括云计算系统和服务等)。在一些情况下,程序和指令被永久地、基本上永久地、半永久地或非暂时地编码在介质上。可执行指令
253.在一些示例中,本文公开的平台、系统、介质和方法包括至少一组可执行指令(例如,计算机程序、计算机应用)或其使用。计算机程序包括一系列指令,可由计算设备的cpu的一个或多个处理器执行,被编写以执行指定任务。计算机可读指令可以实现为程序模块,例如执行特定任务或实现特定抽象数据类型的函数、对象、应用编程接口(api)、计算数据结构等。根据本文提供的公开内容,本领域技术人员将认识到计算机程序可以用各种语言的各种版本编写。
254.计算机可读指令的功能可以根据需要在各种环境中组合或分布。在一些示例中,计算机程序可以包括一个指令序列。在一些示例中,计算机程序包括多个指令序列。在一些
示例中,可以从一个位置提供计算机程序。在一些示例中,可以从多个位置提供计算机程序。在一些示例中,计算机程序包括一个或多个软件模块。在一些示例中,计算机程序可以部分或全部包括一个或多个web应用、一个或多个移动应用、一个或多个独立应用、一个或多个web浏览器插件、扩展、加载项或附加组件或它们的组合。计算机可读指令的功能可以包括使用多个微型模块构建空间的方法和构建诸如生物反应器的结构的方法,如本文别处进一步详细描述的。web应用
255.在一些示例中,计算机程序包括web应用。根据本文提供的公开内容,本领域技术人员将认识到,在一些示例中,web应用使用一个或多个软件框架和一个或多个数据库系统。在一些示例中,web应用是在诸如net或ruby on rails(ror)之类的软件框架上创建的。在一些示例中,web应用使用一个或多个数据库系统,作为非限制性示例,包括关系、非关系、面向对象、关联、xml和面向文档的数据库系统。在一些示例中,作为非限制性示例,合适的关系数据库系统包括sql服务器、mysql
tm
和本领域技术人员还将认识到,在一些示例中,web应用可以用一种或多种语言的一种或多种版本编写。web应用可以用一种或多种标记语言、表示定义语言、客户端脚本语言、服务器端编码语言、数据库查询语言或它们的组合来编写。在一些示例中,web应用在一定程度上以诸如超文本标记语言(html)、可扩展超文本标记语言(xhtml)或可扩展标记语言(xml)的标记语言编写。在一些示例中,web应用在一定程度上用诸如级联样式表(css)之类的表示定义语言编写。在一些示例中,web应用在一定程度上用诸如异步javascript和xml(ajax)、actionscript、javascript或之类的客户端脚本语言编写。在一些示例中,web应用在一定程度上用诸如active server pages(asp)、perl、java
tm
、javaserver pages(jsp)、超文本预处理器(php)、python
tm
、ruby、tcl、smalltalk、或groovy之类的服务器端编码语言编写。在一些示例中,web应用在一定程度上用诸如结构化查询语言(sql)之类的数据库查询语言编写。在一些示例中,web应用集成了企业服务器产品,例如lotus在一些示例中,web应用包括媒体播放器元素。在各种进一步的示例中,媒体播放器元素利用多种合适的多媒体技术中的一种或多种,作为非限制性示例,包括html5、java
tm
和移动应用
256.在一些示例中,计算机程序包括提供给移动计算设备的移动应用。在一些示例中,移动应用在制造时被提供给移动计算设备。在一些示例中,通过本文所述的计算机网络将移动应用提供给移动计算设备。
257.鉴于本文提供的公开内容,移动应用是通过本领域技术人员已知的技术使用本领域已知的硬件、语言和开发环境来创建的。本领域技术人员将认识到移动应用是用多种语言编写的。作为非限制性示例,合适的编程语言包括c、c++、c#、objective-c、java
tm
、javascript、pascal、object pascal、python
tm
、ruby、vb.net、wml和有或没有css的xhtml/html或它们的组合。
258.合适的移动应用开发环境可从多个来源获得。作为非限制性示例,市售开发环境
包括airplaysdk、alchemo、celsius、bedrock、flash lite、.net compact framework、rhomobile和worklight mobile platform。其他开发环境可免费获得,作为非限制性示例,包括lazarus、mobiflex、mosync和phonegap。此外,移动设备制造商分发软件开发工具包,作为非限制性示例,包括iphone和ipad(ios)sdk、android
tm sdk、sdk、brew sdk、os sdk、symbian sdk、webos sdk和mobile sdk。
259.本领域技术人员将认识到,若干商业论坛可用于分发移动应用,作为非限制性示例,包括app store、play、chrome webstore、app world、适用于palm设备的app store、适用于webos的app catalog、适用于mobile的marketplace、适用于设备的ovi store和apps。独立应用
260.在一些示例中,计算机程序包括独立应用,其是作为独立计算机进程运行的程序,而不是现有进程的附加组件,例如,不是插件。本领域技术人员将认识到独立应用经常被编译。编译器是一种计算机程序,它将以编程语言编写的源代码转换为二进制目标代码,例如汇编语言或机器代码。作为非限制性示例,合适的编译编程语言包括c、c++、objective-c、cobol、delphi、eiffel、java
tm
、lisp、python
tm
、visual basic和vb.net,或它们的组合。通常至少部分地执行编译以创建可执行程序。在一些示例中,计算机程序包括一个或多个可执行编译应用。软件模块
261.在一些示例中,本文公开的平台、系统、介质和方法包括软件、服务器和/或数据库模块,或它们的使用。鉴于本文提供的公开内容,软件模块是通过本领域技术人员已知的技术使用本领域已知的机器、软件和语言来创建的。本文公开的软件模块以多种方式实现。在一些示例中,软件模块包括文件、代码段、编程对象、编程结构或其组合。在进一步的各种示例中,软件模块包括多个文件、多个代码段、多个编程对象、多个编程结构或其组合。在一些示例中,作为非限制性示例,一个或多个软件模块包括web应用、移动应用和独立应用。在一些示例中,软件模块在一个计算机程序或应用中。在一些示例中,软件模块在一个以上的计算机程序或应用中。在一些示例中,软件模块托管在一台机器上。在一些示例中,软件模块托管在一台以上的机器上。在一些示例中,软件模块托管在诸如云计算平台之类的分布式计算平台上。在一些示例中,软件模块托管在一个位置的一台或多台机器上。在其他示例中,软件模块托管在一个以上的位置的一台或多台机器上。数据库
262.在一些示例中,本文公开的平台、系统、介质和方法包括一个或多个数据库,或它们的使用。鉴于本文提供的公开内容,本领域技术人员将认识到许多数据库适用于过程对象、3d场景、符号距离函数、渲染、打印和3d对象信息的存储和检索。在一些示例中,作为非限制性示例,合适的数据库包括关系数据库、非关系数据库、面向对象的数据库、对象数据库、实体关系模型数据库、关联数据库、xml数据库和面向文档的数据库。其他非限制性示例包括sql、postgresql、mysql、oracle、db2、sybase和mongodb。在一些示例中,数据库是基于互联网的。在一些示例中,数据库是基于web的。在一些示例中,数据库是基于云计算的。在
特定实施方式中,数据库是分布式数据库。在一些示例中,数据库是基于一个或多个本地计算机存储设备的。生物反应器和生物反应器的制造方法
263.本文提供的设备和系统,例如用于3d打印的设备和系统,可用于构建可执行任何功能的任何形状或任何种类的多维(例如,3d)结构。在一些示例中,本文提供的方法和系统可用于制造生物反应器。本文还提供了这样的生物反应器、它们的结构、设计、形态、应用以及它们的制造方法和使用方法。
264.在一些示例中,本文提供了诸如生物反应器的反应容器和制造这种反应容器的方法。在一些示例中,提供了包括反应容器的系统。反应容器可以包括或者是反应器。反应容器和/或反应器可以被配置为进行任何合适的反应或过程。在一些示例中,反应器可以进行化学反应以生成化学品。在一些示例中,反应器可以合成生物材料。生物材料可以包括或者是细胞、细胞的组分,例如细胞器、细胞核、dna、任何细胞内组分或材料,和/或它们的任何组合。在一些示例中,反应容器或反应器可以包括或者是生物反应器。包括生物反应器的系统可以类似于申请号pct/us19/55231中提供的系统,其出于所有目的通过引用整体并入本文。
265.生成诸如生物反应器的反应容器的方法可以包括提供过程建模应用。过程建模应用可以根据本文其他地方提供的过程建模应用、其他应用或其任何组合。在一些示例中,生成诸如生物反应器的反应容器的方法可以包括执行功能。应用可以被配置为根据来自用户的请求或输入或独立于用户来执行功能。例如,使用过程建模应用执行功能可以包括人工智能(ai)和/或机器学习含义。在一些示例中,执行功能可以包括将多个单元添加到场景。单元可以根据本文别处提供的任何单元。在一些示例中,单元可以包括模块或微型模块。例如,可以将微型模块添加到场景中。该场景可以是本文其他地方描述的任何场景。在一些示例中,场景可以是3d场景。例如,可以将微型模块添加到3d场景。
266.在一些示例中,例如使用过程建模应用生成反应容器(例如生物反应器)的方法还可以包括将多个单元(例如,微型模块)组装成结构以创建反应容器或反应器(例如,生物反应器)。该方法还可以包括为场景创建构造立体几何(csg)树,将场景(例如,3d场景)表示为符号距离函数,通过利用光线行进来渲染场景,生成切片文件队列,以及将切片文件传输到立体光刻3d打印设备或其他设备。该设备(例如,3d打印设备或系统)可以包括或者是本文其他地方提供的任何设备或系统、另一设备和/或它们的任何组合。
267.本文提供了可以根据本公开的方法制造和使用的反应容器,例如生物反应器。在一些示例中,本文提供的反应容器(例如,生物反应器)可以包括或者是用于产生和维持细胞以及用于产生和分离细胞和由细胞制成的产品的系统、组件。本文还提供了制造和使用此类系统的方法。系统和组件以及方法可以提供灵活性以针对不同类型的细胞、细胞环境类型和所产生的分子类型定制生产。系统、组件及其制造和使用方法也可以提供规模的灵活性。例如,本文所述的系统、组件和方法可以在不改变或显着改变实验室规模生长条件的情况下提供生产规模的扩大。
268.在一些示例中,本文提供的生物反应器可用于生长细胞。生物反应器可以包括任何尺寸或规模。在一些示例中,生物反应器可以是微型生物反应器规模,使得该系统可以构建为能够以少量和大量生长和生产细胞和/或细胞产品的台式生物反应器。该系统和使用
方法在其可扩展性、灵活性和资源节约方面具有优势。
269.在一些示例中,本文提供的生物反应器可以是无气泡生物反应器。在一些情况下,在反应器或生物反应器中进行的过程可能会受益于或可能需要用于使反应器内的介质均质化的过程。在一些情况下,可能需要或受益于混合或等同于混合,以使给定区域中的反应器内容物均质化。传统上,在一些情况下,在常规反应器中,混合方法(例如螺旋桨或气泡)用于在反应器中提供均质化。这种混合可以在生物反应器内产生湍流,其可以进行均质化并且可以增加反应器内部区域中的传质、传热和流体传输的速率。然而,在许多情况下,湍流可能不是合适的或最佳的。反应器内的湍流可能使精确控制条件变得更加困难。因此,在一些情况下,避免混合、气泡和/或螺旋桨可能是有益的。本文提供了生物反应器,其在一些情况下可以能够和/或配置为执行它们的功能,而无需螺旋桨或气体或可在生物反应器内部产生湍流的混合方法。例如,可以避免生物反应器内的气泡和湍流。在一些示例中,本文提供的生物反应器在整个过程(例如,由生物反应器进行的过程或反应,例如细胞生长)中包括层流。本文其他地方提供的内部和外部结构、拓扑结构和特性可以制造和使用能够以层流执行其预期功能并且可能不需要气泡或湍流来进行均质化的生物反应器。在一些示例中,可以在反应器中提供气体和/或液体流动的均质层流。
270.在一些示例中,反应容器(例如,生物反应器)可以包括互连的生物反应器组件,例如模块或微型模块,它们可以单独或组合地执行过程或反应,例如产生或生长细胞或执行其他功能。细胞可以是任何种类的细胞。细胞的示例可以包括细菌细胞、真菌细胞、酵母细胞、真核细胞、植物细胞或藻类细胞。细胞可以是重组细胞。
271.在一些示例中,反应容器或生物反应器可以包括或者是生产生物反应器模块或生产层(例如,图47中所示的生产层4694)。生产生物反应器或生物反应器的生产层4696可以提供用于扩大生长规模和从细胞或其他生物物种生产细胞和/或生物产品的环境。
272.本文提供的反应容器,例如生物反应器(例如,生物反应器4700或本文其他地方提供的任何其他生物反应器)可以包括多维结构,例如可以包括一个或多个(例如,多个)微型模块的3d结构。生物反应器可以包括大于或等于1、2、4、6、8、10或更多个微型模块,包括其中的增量。微型模块可以创建一个或多个(例如,一系列)通道和室,用于细胞的生长和运动以及液体介质、气体和生物产品的流动。
273.生产生物反应器的微型模块可以包括形状,例如几何形状。这种几何形状可以包括螺旋体。螺旋体可以包括多种形状和/或结构或以多种形状和/或结构实现。在一些示例中,形状和/或结构可以包括晶体结构。
274.在一些示例中,微型模块可以包括诸如双螺旋体、修改的双螺旋体或可以被描述为三周期最小表面(tpms)的任何形状的形状。这种类型的表面可以形成晶格系统,该晶格系统可以在任何方向或跨越任何坐标系的任何维度生长。例如,晶格可以在笛卡尔坐标系的一个或多个轴上生长,例如x、y和/或z。在一些示例中,生长可以周期性地发生。
275.在一些情况下,tpms可以没有自相交并且可以将给定体积分成两个(或更多)独立的子体积。自相交可以包括具有每个点的单个法线向量的表面,该法线向量可以定义该表面。如果表面将其所包围的体积分成两个独立且全等的子体积,则该表面称为平衡表面。在一些示例中,tpms可以根据基本面片或不对称单元来描述,整个表面可以由其对称元素构建。
276.在一些示例中,微型模块可以彼此流体连接(例如,互连),使得气体、介质和/或副产品可以从一个微型模块流到另一微型模块。
277.在一些示例中,生产生物反应器的微型模块可以包括形状。该形状可以是任何形状,例如任何几何表示。微型模块的形状可以在本文其他地方提供,例如在表1.1中。在一些情况下,形状还可以包括修改或过渡。例如,可以对微型模块的形状、其连接和/或两者进行修改。形状的修改或过渡可以是很小或很大。修改或过渡可以使(例如,微型模块的)结构或形状适应给定的宏观结构或功能。在一些示例中,修改可以包括阻塞连接或交叉点的一部分(例如,“口”),修改结构的一个或多个通道的直径,或者形状的完全或其他变化。
278.在一个示例中,生物反应器的微型模块的形状可以包括或者是双螺旋体形状或修改的双螺旋体形状。双螺旋体(dg)形状可以包括两个螺旋体和/或两个相互生长的非重叠域。修改的双螺旋体(dg)形状可以包括两个相互生长的非重叠域,这些域可以由两个由基质相隔开的恒定平均曲率(cmc)表面界定。例如,修改的双螺旋体结构可以包括对未修改的双螺旋体的连接的修改,以使该结构适应给定的宏观结构或功能。修改可能很小也可能很大。在一些示例中,修改可以包括阻塞连接或交叉点的一部分(例如,“口”),修改结构的一个或两个相通道的直径,或者完全或部分消除存在于dg结构形状中的任何相通道。dg或修改的dg可以包括与第二螺旋体结构交织的第一螺旋体结构。两个通道可以由多孔膜(基质相)隔开。基质相可以以至少部分基于特定压力和气体成分的方式扩散气体分子。当液体和气体成分微通道半径相等时,基体相表面可以等于它们之和。当多个dg互连(例如,装配在一起)时,两个cmc表面可以创建两个连续的通道。这两个通道可以为液体介质和/或气体的流动创建两个不重叠的通道。多孔膜可以提供一些细胞类型可以在其上粘附和生长的表面。在一些示例中,一个通道可以在整个生产生物反应器中提供液体介质。在一些示例中,两个通道都可以提供液体。在一些示例中,一个通道可以提供液体介质,而另一通道可以向生产生物反应器提供气体。在一些示例中,微型模块的微型通道的直径可以根据适合于具体细胞类型、生产需要和特性等而变化。
279.在一些示例中,微型模块可以具有规则的立方体包裹结构,其具有边缘的长度“l”。l可以与扫描直径有关。在一些示例中,l可以等于微型通道的扫描直径的三分之二,乘以二的平方根,乘以三的平方根。如果在微型模块内两个组分的半径相同,则对应于液体组分的微型通道的总表面积和总体积可以等于气体成分的相应尺寸。在一些示例中,组分的半径可以不同。在两个半径相等的一些示例中,微型通道半径可能不大于扫描半径的0.7倍。在一些情况下,两个不同面的两个微型模块之间的最短距离可以基本上等于扫描半径乘以二的平方根,减去每个组件通道半径的相加。
280.在一些示例中,具有dg形状的第一通道的面积可以等于dg内的第二通道的面积,并且基质相的面积可以是第一通道的面积和第二通道的面积之和。
281.在一些示例中,例如在dg形状中,分隔通道的基质相与每个通道的中心之间的距离可以是常数。
282.在任何形状的生物反应器(例如,具有dg形状或本文别处提供的其他形状的生物反应器)中介质和气体流过产生层(例如,产生层4696或任何其他产生层、产生层或本文其他地方提供的产生生物反应器)的速率可以由多种因素确定,例如选择的细胞类型和细胞密度,以及将在细胞上产生的应力条件。气体通过基质扩散到液体介质中的速率可以由多
种因素确定,例如气体成分和由结构形成的气体通道中的气体压力以及膜厚度和选择用于制造通道及周边区域的材料。气体流速和工作压力可能与培养细胞密度有关。在一些示例中,气流可以等于每分钟的气体成分体积。在一些示例中,气流可以大于或等于每分钟气体成分体积的约2、3、5或10倍。在一些示例中,工作压力可以从约1个大气压(atm)变化到5个atm。在一些示例中,工作压力可以大于或等于约1个atm、2个atm、3个atm、4个atm、5个atm或更多。
283.生物反应器的微型模块的形状可以被配置为提供给定的特性。每个形状可以包括示例优势。例如,dg形状的示例优势可能是减轻重力,这可能在其他结构中提供不均匀的介质暴露和气体交换。dg形状可以产生三维(3d)层流力,使得任何一个细胞到结构壁的距离变化可以被平均化,以在细胞群中提供更恒定和均匀的暴露。此外,dg形状可有助于避免液体或气体的停滞区域,其中流动可能不会发生或可能被中断。这可以允许以更低的速度通过生物反应器使用更高的吞吐量,并且可以导致对细胞的更低的剪切应力。这可以避免生物反应器中的湍流。这可以在生物反应器中使用层流的同时使实现均质化成为可能。
284.在一些示例中,生物反应器(例如,dg生物反应器)的通道的平均流体速度可以大于或等于约1μm/秒、3μm/秒、5μm/秒、10μm/秒、15μm/秒、20μm/秒、50μm/秒、100μm/秒、200μm/秒、或更多。例如,与一些其他生物反应器系统相比,dg结构可以提供合适和优化的介质和气体扩散。在一些示例中,流过dg内通道的液体介质的速度可能大于流过同一通道的细胞的自由落体速度。
285.与许多其他形状选择相比,微型模块的dg结构可以提供增加的表面积,并且这种增加的表面积可以提供用于细胞生长的表面积以及液体介质流动、混合和气体交换的改进。当l等于l1时,每个组件的表面可以描述为y=3258.6.xe(-1),其中y是平方毫米/微升,x等于l1定义的半径。
286.在一些示例中,生物反应器的微型模块结构(例如,dg结构或包括本文别处提供的任何形状的结构)可以一起装配成构成生产生物反应器的宏观结构或宏观形状。宏观结构或宏观形状可以包括任何形状、任何几何形状、任何几何表示、任何尺寸和/或它们的任何组合。在一些示例中,宏观结构可以是立方体、棱锥体、球体、圆柱体、多维几何形状和/或它们的任何组合。作为示例,宏观结构可以是空心棱锥、层状棱锥、棋盘排列、圆木、球体或不同的形状。
287.在一些示例中,生产生物反应器内的宏观结构和形状以及微型模块的数量可以针对各种因素定制,例如待生长的细胞的细胞分裂速率、调节液体介质的速度、气体交换、细胞通过生物反应器的运动和其他因素。每个宏观结构可以提供与细胞相互作用的不同可能性,并且可以根据生产生物反应器打算执行的特定过程进行选择。
288.示例生物反应器可以包括宏观结构形状。例如,可以组装多个微型模块以形成宏观结构。宏观结构可以具有各种形状。宏观结构可以是球体、棱锥、空心棱锥、层状或其他形状、结构或拓扑结构,例如本文别处提供的宏观结构形状和/或拓扑结构。
289.在一些示例中,反应器可以包括棱锥或空心棱锥宏观结构形状。这样的结构可以实现适合生长的环境,同时在整个生物反应器中保持恒定的速度和细胞密度。随着时间的推移,更敏感的菌株可能需要更多的干预,在这种情况下,空心棱锥可以提供这种能力。
290.在一些示例中,生物反应器可以包括层状棱锥宏观结构形状。这种宏观结构形状
可以为生长和发育提供合适的环境,例如通过保持速度和密度一致(例如,基本恒定)。在一些情况下,可以在给定的持续时间,在一些情况下,在每个时刻提供对细胞子集或在一些情况下对每个细胞的适当访问。层状棱锥微观结构也可以实现直接干预和治疗。
291.在一个示例中,生物反应器可以包括棋盘宏观结构形状或原木排列形状。棋盘和原木排列可以提供对细胞子集的适当访问(例如,在一些情况下,完全访问),在一些情况下,在给定的持续时间内,在一些情况下,在过程时间的每个点上对生物反应器的每个细胞进行访问。在一些示例中,棋盘和/或原木排列可以提供或促进对生物反应器中流体和/或细胞的均匀速度和/或密度的控制。在一些示例中,细胞可以在生物反应器中的给定点或位置(例如,宏观结构的顶部)进入,并且细胞收集设备可以存在于生物反应器的给定位置(例如,在宏观结构底部)。
292.在一个示例中,生物反应器可以包括球形宏观结构形状。图47中示出了球形生物反应器4700的示例。球形生物反应器可以是无气泡球形生物反应器。例如,可以使用本公开的方法制造生物反应器,并且生物反应器可以包括最少的气泡至基本上没有气泡。在一些情况下,生物反应器中可能存在一些气泡。在一些示例中,球形生物反应器4700可以包括多个对称平面(对称平面)。例如,生物反应器可以包括一个或多个单元,这些单元可以重复构建生物反应器的结构。作为示例,4700所示的球形生物反应器包括三个对称平面(例如,平面4740、4750和4760)。对称平面可以将球形生物反应器的结构划分为多个重复单元(例如,在该示例中为八个重复单元)。重复单元可以彼此相似或基本相同。例如,在球形生物反应器4700中,重复单元可以是球形的八分之一。这种重复单元4698的一个示例在图46a中示出。重复单元4698可以形成生物反应器4700体积的八分之一。换一种说法,8个重复单元可以至少在某种程度上类似于重复单元4698可以重复(例如,在体积上对称)以形成球形生物反应器4700。在一些示例中,重复单元可以完全相似或相同。在一些示例中,重复单元可以在某种程度上相似。在一些示例中,重复单元可以在某种程度上不同并且可以包括彼此相比的一些差异。类似的概念和/或方法可用于构建具有不同宏观结构形状和/或拓扑结构的生物反应器。
293.生物反应器(例如,球形生物反应器)可以包括一个或多个通道。生物反应器的通道可包括一个或多个可用于收集细胞的收集排放通道4710。生物反应器的通道可包括一个或多个气体摄入通道4720。气体摄入通道可用于将气体注入生物反应器,例如气室(例如,4620或4840)。通道可包括一个或多个液体(例如,培养基)摄入通道4730,其可用于将液体供应(例如,生长介质)注入生物反应器。可根据本文任何地方提供的方法和系统为任何生物反应器宏观结构提供液体供应。在每种结构或配置中,可以优化整个系统,并且可以进行适当的调整。
294.在一些示例中,生物反应器的各种气体摄入通道4710可以在某种程度上彼此相似。在一些示例中,生物反应器的各种气体摄入通道可以在某种程度上彼此不同。例如,可以提供气体摄入通道,每个气体摄入通道可以包括用于注入气体的开口,以将气体供应到生物反应器的给定区域,该区域可以距球体中心给定距离。在一些示例中,提供用于将气体输送到生物反应器的不同区域(例如,位于距球体中心的不同径向距离处)的气体摄入通道可以基于它们的预期应用包括一些相似性和一些差异。
295.示例球形生物反应器的截面图在图46a和图46b中提供。图46a示出了可用于将液
体供应注入生物反应器的培养基摄入通道4600。液体供应可以包括培养基。液体供应可以包括额外的组件。液体供应或介质可根据本文其他地方提供的供应和介质或其组合。
296.作为示例,图46b示出根据本文提供的方法和系统的示例球形生物反应器的截面的截面图。生物反应器可以包括一个或多个通道,例如多个通道。通道可以包括收获通道4696。在一些情况下,收获通道可以根据本文其他地方提供的通道。生物反应器还可包括收获层4610、一个或多个气室、一个或多个培养层和其他组件和/或模块。收获通道和收获层可用于从生物反应器收获液体介质和细胞。在一些示例中,生物反应器还可以包括用于气体的类似收获通道(图中未示出)以从生物反应器收获用过的气体。在图46b所示的示例中,生物反应器包括第一气室4620、第四培养层4630、第二气室4640、第三培养层4650、第三气室4660、第二培养层4670、第四气室4680、第一培养层4690、第五气室4692和其他组件。本文提供的生物反应器,例如球形生物反应器,或包括任何宏观结构形状的任何其他生物反应器可以包括任何数量的层、任何数量的通道,例如任何数量的培养层、任何数量的气室和/或其他组件、模块、通道或室、其任何配置及任何组合。
297.生物反应器(例如,球形生物反应器,例如图46b中所示的生物反应器)可以包括一个或多个培养层和/或一个或多个生产层或生产体积。培养层(例如,4630、4650、4670、4690和/或其他培养层)可以是生物反应器的可以培养细胞的层。在一些示例中,生产体积可以在培养层中。例如,生物反应器的培养层可以包括生产层。生产层可以在其中包括多个通道,其示例示为生产通道4690。生产通道4690可以是饱和的。例如,大量通道(例如,高密度通道)可以安装在相对较小的体积中。或者,通道可能不饱和。生产通道4695的截面图在图46b中示为示例。
298.包含给定形状的宏观结构的生物反应器,例如本文其他地方提供的任何宏观结构形状,例如棱锥、空心棱锥、棋盘、圆木、球体、立方体、圆柱形或任何其他本文提供的宏观结构可以包括多个微型模块,这些微型模块可以被组装以形成宏观结构。将微型模块(例如,dg微型模块或任何形状的微型模块,例如,本文任何地方提供的任何微型模块)布置成宏观结构可以提供用于确定和优化生物反应器内的液体介质和气体流动的机制。在一些示例中,宏观结构由微型模块的层或级别组成。在一些示例中,微型模块可以布置在级别或层中,并且每个级别中的液体介质的速度可以基本相同。或者或另外,液体介质在每个级别或层中的速度可以变化。例如,液体介质的速度可以在级别或层之间增加或减少。液体介质的速度可以从微型模块到微型模块变化,或者可以在微型模块之间或跨微型模块基本相同。
299.在一些示例中,生物反应器(例如,生产生物反应器或生物反应器的生产体积或层)还可以包括液体介质输入设备。液体介质设备可以被配置为向宏观结构内的每个级别的微型模块提供液体介质。在一些示例中,提供给每个级别的液体介质的体积可以在每个级别中保持基本恒定的细胞密度。
300.生物反应器可以包括一个或多个微型通道。微型通道可以包括各种尺寸。在一些情况下,微型通道半径可以与细胞半径、细胞密度或其他参数(例如,丝状排列、链状排列等)相关联。在一些示例中,细胞密度可以从1x 106个细胞/ml到1x 10
12
个细胞/ml变化。在一些示例中,液体介质通过每个微型模块的速度可以由细胞分裂速率确定,使得细胞穿过单个微型模块或微型模块级别的时间可以与细胞分裂速率基本相同或者可以与细胞分裂速率成正比,使得细胞在运输过程中可以分裂大于或等于1、2、3、4、5或5次以上。在一些示
例中,第一级别可以包括示例体积“x”的液体介质,使得对于给定数量的细胞,密度为x,以及具有2x体积的液体介质的第二级,并且在细胞从第一级别过渡到第二级别的持续时间中,细胞的数量加倍(例如,细胞的子集(例如,每个细胞)可能平均分裂一次),因此第二级别的密度可能保持为x(例如,级别之间的恒定细胞密度)。
301.额外的优化可以通过确定宏观结构底部的预期细胞数量来实现,细胞和/或生物产品在通过输出到收集容器离开结构之前到达宏观结构的终端。还可以针对不同级别的宏观结构确定预期的细胞数量。根据基层和不同级别的预期细胞数量,可以针对每个级别调整气体和液体介质的流量,以补偿随着细胞分裂细胞数量增加、细胞运动和随着它们通过生物反应器向结构底部前进而积累细胞而增加的气体和液体介质需求。生物反应器中的液体介质供应
302.生物反应器可以包括一个或多个组件以将液体介质供应到生物反应器或其模块。组件可以包括培养介质配制器、电穿孔器或其他灭菌设备、储存器、泵、气泡传感器和气泡捕集器中的一种或多种。培养介质配制器可以通过混合介质的组分和对于待在模块中生长的细胞来说是合适的水来生成用于生物反应器的液体介质。电穿孔器可以与介质发生器互连,例如以清洁介质并提供无菌起始介质以供应给用于生长细胞的一个或多个模块。可以包括气泡传感器和气泡捕集器,以检测和/或去除液体介质中的任何气泡,这些气泡可能在介质生成、清洁或任何其他原因中引入。
303.在一些示例中,系统(例如,生物反应器)可以包括一个或多个用于容纳储存介质的储存器,例如,在将其供应到模块或微型模块之前。在一些示例中,系统(例如,生物反应器)可以包括至少2、3、4、6、8、10或更多个储存器,包括其中的增量。储存器可以异步填充,使得一个储存器填充,而另一已经完全填充的储存器可用于向生物反应器和/或其模块供应液体介质。以这种方式分离储存器可能有利于将系统(例如,生物反应器)的细胞生长模块与示例电流的连接隔离开。被填充的储存器可能会暴露于可能从上游组件(例如电穿孔器)流出的电流。填充的储存器可以与电流隔离,使得它不会将电流传输到系统的下游组件和模块(例如,生物反应器)。在一些示例中,储存器的体积可以与生产生物反应器在为该过程选择的细胞分裂时间上的产量相关联。在一些示例中,多个储存器可以平行安装并且彼此分离。在一些示例中,可以串联安装多个储存器。在一些示例中,可以以串联和并联配置的组合、另一种配置和/或它们的任何组合来安装多个储存器。
304.在一些示例中,系统(例如,生物反应器系统)的液体介质供应组件还可以包括一个或多个传感器。传感器可以测量包括介质的ph值和温度的参数。传感器可以是在线传感器或可以连接到从液体介质供应的一种矿石组分间歇地对介质进行采样的采样设备。供应系统可以根据系统的使用、规模和操作以一定范围的速率提供液体介质。在一些示例中,液体介质供应可以向生物反应器或其模块(例如用于细胞生长的室)提供每小时约100微升至约1000升。在一些示例中,液体介质供应可以为生物反应器或其模块、通道或室(例如细胞生长室)提供每小时约0.5升到1000升。在一些示例中,液体介质供应可以向生物反应器或其模块、组件、通道或室提供每小时约0.5升至5升。在一些示例中,液体介质供应可以向生物反应器或其模块、组件、通道或室(例如用于细胞生长的通道或室)提供每小时约10升至80升。在一些示例中,液体介质供应可以向生物反应器或其模块、组件、通道或室(例如,用于细胞生长的通道或室)提供每小时约100升至1000升。
305.液体介质供应组件可以包括一个或多个泵,用于将介质从储存器或介质配制器流动到生物反应器系统的组件,例如细胞芯片、沙箱生物反应器或生产生物反应器。在一些示例中,系统(例如,生物反应器系统)可以包括大于或等于1、2、3、4、6、8、10或更多个泵,包括其中的增量。泵可以是相同类型的泵或可以是不同类型的泵。示例泵可以包括注射泵、蠕动泵和/或压力泵。
306.在一些情况下,液体介质供应系统可以被配置为提供通过生物反应器的给定区域、模块、组件、通道或室的单向流动。在一些示例中,泵可以是可用于向细胞芯片供应介质的注射泵。细胞芯片可以是本文别处提供的细胞芯片或细胞芯片模块。在一些示例中,泵可以是可用于向沙箱生物反应器供应介质的注射泵。在一些示例中,泵可以是用于向生产生物反应器供应介质的蠕动泵。在一些示例中,该系统(例如,生物反应器系统)可以包括三个泵、两个注射泵,供应细胞芯片和沙箱反应器,以及供应生产生物反应器的蠕动泵。泵可以同步或单独工作。在一些示例中,所有三个泵可以同步工作。一个或多个泵可以向生物反应器或其模块或组件(例如泵下游的模块(例如下游模块))供应介质(例如,具有高度的体积和速率精度)。下游模块可以根据本文其他地方提供的下游模块。在一些示例中,准确度可以在1、2、3、4或5纳升内。生物反应器中的气体供应和气体成分
307.在一些示例中,本文提供的系统(例如,生物反应器系统)可以用于与可能受益于或需要特定气体成分的细胞兼容,例如可能需要氧气来生长和/或存活的细胞。用于构建生物反应器模块的材料可以包括玻璃、丙烯酸、胶原蛋白、聚二甲基硅氧烷(pdms)、聚乙二醇(pegda)、聚(d,l-丙交酯)、丝、纤维素、gelma、藻酸盐、陶瓷、和/或其他可允许介质氧化的生物相容性聚合物。在一些示例中,系统(例如,生物反应器系统)还可以包括控制器,该控制器可以控制氧气和其他气体溶液在生物反应器或其模块中的扩散。在一些示例中,气体溶液可以由诸如来自储气罐或其他供应机构的纯组分气体配制而成,例如以建立各种浓度和流速的混合物或纯气体溶液。替代地或另外地,气体混合物可以由净化的空气混合物提供。气体溶液可用于提供通气环境并可控制ph。气体溶液可以向液相提供碳、氮、磷、硫和/或其他介质组分。在一些示例中,系统可以具有多于一个的气体控制器或机构,从而可以将不同的气体溶液提供给系统内的不同模块、组件、部件、通道或室(例如,在生物反应器的给定部分内)。
308.在一些示例中,生物反应器的结构内的气体和/或液体的流动可以沿着线性轴,例如单个线性轴。这方面的示例可以包括层状生物反应器、空心棱锥反应器或包括另一种宏观结构的生物反应器。在这样的示例中,在一些情况下,可以基于单轴上的平均位移来描述流动。
309.参考图46a和图46b,在一些示例中,在球形生物反应器中,用于输送液体供应的通道(例如,通道4600)、用于注入气体的通道(例如,气室4620、4640、4660、4680和4692)以及一个或多个接种通道(未示出)可以通过生产结构(例如,可以在培养层4630、4650、4670和4690内部的生产体积4694)分别到达合适的点。生物反应器中液体和气体供应的方向和/或速率可能会影响生物反应器中细胞或微生物的生长速率。例如,图46a中的通道4600沿着球形生物反应器的半径方向延伸并且可以充当液体供应通道(例如,培养基摄入通道)。在一些示例中,诸如通道4600之类的通道可用于将诸如培养基之类的液体介质注入生物反应器
(例如,球形生物反应器)的不同部分(例如,不同层)。液体流动4697的方向可以是角度方向,例如图46a中所示。在一些示例中,液体流动的方向可以是有角度的、径向的(液体流动的径向方向未在图中示出)和/或两者的组合。液体介质可以流入生物反应器,例如在其层中,并且可以将培养基输送到要在生物反应器中生长的细胞(例如,在培养层4630、4650、4670、4690和任何其他培养层中)。液体介质可以到达细胞并为它们提供营养以使其存活和/或生长。生物反应器的拓扑结构和宏观结构,以及液体和气体在其中注入和流动的方向和方法,都可能影响细胞的生长速度。
310.在一些示例中,生物反应器,例如,图46a、图46b和/或图47中所示的生物反应器可以包括一个或多个接种通道(图中未示出)。在一个示例中,生物反应器包括单个接种通道。在一些情况下,一个或多个接种通道可用于根据需要处理和/或接种细胞。
311.图48示意性地示出了本文提供的生物反应器内的通道和室的视图以及其中的气体和液体供应(例如,培养基、水、营养物等)的流动。图48所示的生物反应器可以包括任何宏观结构形状和任何微型模块形状。在一个示例中,图48中所示的生物反应器可以是球形生物反应器,例如图47中所示的生物反应器4700。
312.气体(例如,气流4830)可以通过开口(例如,图47中所示的气体摄入通道4720的开口)被注入生物反应器中并且经受流动气体流动通道4820。注入的气体可以包括具有合适成分(例如,根据本文别处提供的气体成分)的新鲜气体馈送。在一些情况下,在气体已经通过生物反应器的一些区域并且可能已经到达生物反应器内的细胞之后,可以使用气体摄入通道或可以与气体摄入通道4720基本相似的另一摄入通道来从生物反应器排出或去除气体。在一些示例中,可以使用不同的方法从生物反应器中排出气体。此类方法的示例可包括使用可暴露于外部环境的生物反应器周围的外层或外壳(例如,生物反应器周围的膜)。这种外层或膜可以是多孔的并且可以允许从生物反应器排出气体。替代地或另外地,生物反应器可以包括气体收获层(未示出)和/或气体收获通道(未示出),其可以在某种程度上类似于和/或在某种程度上不同于收获通道4690和收获层4610。例如,气体收获通道可以位于与收获通道4696不同的区域中,它可以被配置为在其中具有气流,并且它可以用于在这种气体已通过生物反应器的区域的子集之后从生物反应器中排出气体。可以使用这些方法中的任何一种从生物反应器中排出气体。在一些情况下,类似的方法可以应用于除球形生物反应器4700之外的生物反应器。
313.液体可以通过开口(例如,液体摄入通道4730的开口)注入生物反应器中并且在液体流动通道(例如,液体流动通道4810)中流动。液体可包含培养基或本文别处列出的成分,其可供应至生物反应器以帮助细胞生长。液体可以流过生物反应器的结构。液体可以包括培养基。在一些情况下,液体可以包括悬浮在其中的细胞。液体成分可以根据本文别处提供的液体成分。
314.在生物反应器内部,可以存在多个微型模块。微型模块可以是生物反应器的微型模块。微型模块本身可以由更小的单元构成。在一些情况下,多个单体可以组装成微型模块,例如微型模块。在一些示例中,微型模块(例如,诸如构件块4860的微型模块)可以包括至少一个液体流动通道4810和一个气体流动通道4820,气体流动(例如,气体流动4830)可以被注入其中并且经受流动。微型模块(例如,构建块4860)可以在整个生物反应器的结构中重复。虽然图48图示球形生物反应器中的气体和液体流动作为示例,但是类似的方案可
用于其他生物反应器拓扑结构和结构。
315.生物反应器还可包括气室4840(例如,类似于气室4620、4640、4660、4680和4692)。在任何形状和/或结构的示例生物反应器中,气室4840可以具有任何拓扑结构和/或结构。在球形生物反应器4700中,气室可以是空心球形室。例如,在一些情况下,如图48所示,气体流动通道4820和液体流动通道4810可以不交叉或穿过球形空心气室(例如,4810)。空心气室4840可以容纳多个培养通道4850,细胞或微生物可以在其中培养。在一些情况下,如图48所示,培养通道4850可以在气室4840内部。
316.气体流动和液体流动可以流过在微型模块(例如,构件块4860)中它们各自的通道(例如,通道4810和4820),并且当这些通道到达气室4840时,气体流动和液体流动可以进入并穿过容纳在气室中的培养通道4850。因此,培养通道4850可以安置有气体供应和液体供应两者,这可以帮助细胞生长和/或存活。在一些示例中,通道可以是管道。
317.生物反应器的宏观结构或拓扑结构可以基于应用和过程的目标特征(例如,细胞生长)来选择。在一些情况下,球形生物反应器可能比其他几何形状更合适,并且可以提供优于其他生物反应器拓扑结构和/或宏观结构形状(例如层状、棱锥形、空心棱锥形或生物反应器的其他结构)的一些优势。球形生物反应器的一个示例特征是球体的体积或示例壳的体积(球体的两个相应半径之间的体积)相对于其半径遵循立方关系(例如,v=(4πr3)/3,其中v=体积,r=半径)。表示这一点的示例图在图45中示出。生物反应器或其球壳的体积可以对应于或包括细胞或微生物在其中生长的体积。因此,细胞生长的体积可以例如基于距球体中心的径向距离相对于球体半径的线性增加而立方增加。这在包括棱锥或层状结构的生物反应器中可能不同。该特征可能是有利的,因为与其他生物反应器拓扑结构和结构相比,增加的生长趋势或速率(例如,立方)可能与可在生物反应器中生长的示例微生物或细胞的增殖速率(例如,自然生长速率)的趋势更相似,在许多情况下,这可能是有益的。例如,在球形生物反应器中保持一致和/或均匀的压力、流体流动、细胞生长和细胞浓度可能是方便、有效和/或可行的,并且可以提供用于生长细胞的合适条件。在示例中,可以防止由于给定区域中的细胞过度增殖而导致的细胞凋亡。生物反应器的使用方法
318.在一些示例中,本文提供的反应容器或生物反应器可用于产生或生长细胞。图44示出了利用本文提供的反应容器或生物反应器生产细胞的示例方法。在一些情况下,生物反应器可以包括输出通道。在一些情况下,可以通过生物反应器或其模块的输出通道收集细胞。在一些示例中,细胞可以收集在生物反应器或其模块内,并且可以进一步储存在生物反应器或其模块中,例如将细胞储存在生物反应器的细胞芯片模块内。
319.在一些示例中,生物反应器可用于生产生物产品(例如,来自细胞),例如小分子、蛋白质、抗体、代谢物或由在生物反应器中生长的细胞产生的其他产品。生物产品可以通过生物反应器的输出通道收集并与生长的细胞分离,例如通过多孔膜扩散或通过过滤或使用另一种技术。在一些示例中,生物产品可以在细胞内部。为了收获生物产品,可以收集和/或裂解细胞,然后如果/在需要时可以进一步纯化生物产品。在一些示例中,生物产品可以从细胞中分泌出来并且可以在不收获或不裂解细胞的情况下被收集。
320.本文所述的生物反应器和包括此类生物反应器的系统具有优化多种细胞类型的生长和规模扩大的灵活性。在一些示例中,系统的生物反应器是生产生物反应器,用于扩大
细胞生长规模、产生大体积或细胞、或在条件下生长细胞以连续和/或大规模方式生产和收获生物产品。在一些示例中,包括生产生物反应器的系统可以包括一个或多个附加模块。附加模块的示例可以包括细胞芯片模块。在一些示例中,该系统可以包括用于细胞的初始生长和/或用于储存细胞以向生产生物反应器提供特定类型细胞的细胞芯片模块,其中这种生产生物反应器然后用于扩大细胞的生长或生产和/或生物产品的生产的规模。附加模块的另一示例可以包括沙盒模块。在一些示例中,系统可以包括具有生产生物反应器模块(具有或不具有作为系统的一部分的细胞芯片模块)的沙盒模块(例如串联或以任何其他配置),其中包括这样的沙盒模块以测试、分析和/或优化在生物反应器生产模块中扩大规模之前的细胞生长条件。
321.包括生物反应器的系统可用于生产多种细胞类型和生物产品。例如,系统包括单独在本文别处描述的生物反应器或与一个或多个细胞芯片模块和/或沙盒模块(在本文别处也称为沙盒生物反应器)可以适应干细胞的生产和/或其他类型的细胞疗法,包括自体和同种异体生产。该系统可以适应干细胞的生产和其他类型的细胞疗法,包括自体和同种异体生产。在一些示例中,它可以为个性化嵌合抗原受体t细胞(car-t)治疗进行t细胞的扩增、基因递送或激活。在一些示例中,干细胞可以是未分化的、生长的和/或分化的。
322.在一些示例中,待在系统中生长的细胞可以是原核细胞,例如细菌细胞。在一些示例中,生长的细胞可以是真核细胞,例如酵母细胞、真菌细胞、藻类细胞、植物细胞、鸟类细胞或哺乳动物细胞。细胞可以在培养基中自由漂浮或可以是贴壁细胞,其可以粘附到一个或多个表面,例如生物反应器和/或系统的其他模块内的表面。可以转化或以其他方式改造细胞以产生生物产品,例如异源蛋白质、抗体、小分子和/或代谢物。
323.在一些示例中,包括本文所述的生物反应器的系统可以适应病毒、噬菌体和/或其抗原的产生。
324.在一些示例中,包括本文描述的生物反应器的系统可以适应非天然存在的生物体、非天然存在的病毒、合成生物体和/或异种机器人的产生。
325.在一些示例中,本文所述的系统、设备和方法可以在零重力或微重力条件下使用,使得细胞在零重力或微重力条件下生长。用于构建生物反应器模块的方法和材料
326.本文中的系统、组件和模块可以由多种材料制成,并且可以根据所生长的细胞和采用的细胞环境来定制这些材料。在一些示例中,组件和模块或其部分可以通过3d打印制造。在一些示例中,可以使用本文别处提供的方法和/或系统、其他方法和/或系统、和/或它们的任何组合来执行3d打印。打印可以使用市售的树脂和紫外线(uv)可固化的生物相容性聚合物。在一些示例中,每个微型模块形状可以在虚拟环境中离散地设计。在一些示例中,组件和模块可以由可以如本文所述组合和布置在一起的市售组件来提供。在一些示例中,所使用的生物材料可以包括三种子组分、生物相容性聚合物、光引发剂和uv吸收剂的组合。
327.本公开的设备和系统可以通过3d打印形成,例如立体光刻。在一些示例中,可以将本公开的设备的计算机辅助制造(cam)或计算机辅助设计(cad)模型提供给可以采用立体光刻的3d打印系统。这种方法可以包括提供具有树脂的容器,该树脂包含光引发剂和一种或多种聚合物前体。例如,可以使用光源(例如,紫外线(uv)激光或任何其他合适的光)将预编程的设计或结构绘制到具有树脂的容器的表面中。树脂可以是光聚合物,其在与光(例
如,uv激光)接触时光化学固化以形成单层。在制造过程中可以添加和固化额外的树脂。在一些示例中,制造工艺可以包括或者是逐层制造工艺。立体光刻可用于在任何方向上构建对象和/或模块。在一些示例中,立体光刻可用于以添加的自上而下或自下而上的制造方法构造模块。
328.在一些示例中,构建反应器、生物反应器或其模块可以包括聚合物(例如,嵌段共聚物)的自组装以形成3d结构(例如,螺旋体、几何形状或任何形状、形式、几何形状或尺寸的构造)或减材制造方法。
329.减材制造方法可以包括化学或机械去除牺牲材料。例如,可以使用具有烧结激光的粘合剂制造来形成牺牲材料。牺牲材料可以浸没、浸入或以其他方式涂覆在生物相容性聚合物中。然后可以溶解或机械去除牺牲材料以从生物相容性聚合物形成3d形状或结构(例如,螺旋体)。示例3d打印的生物反应器
330.可以使用本文别处描述的3d打印设备和方法来打印无气泡生物反应器。图57a示出了示例打印工艺。可以使用3d建模来配置生物反应器的管道和基质以及辅助结构。3d模型可以转换为用于3d打印的滑块。在打印之前,可以配制生物聚合物树脂并且可以准备打印机控制器。然后可以使用3d打印设备打印生物反应器,并且在打印后可以对生物反应器进行后处理。图57b示出了3d打印的生物反应器的数字渲染和作为位置高度的函数的横截面图。第一截面图示出了反应器的入口和出口。第二截面图示出了螺旋体形状的内部结构。第三截面图示出了连接到螺旋体通道的反应器主通道。
331.示例3d打印机设备和打印的生物反应器在图58中示出。打印的生物反应器包括双螺旋晶体,总空隙体积约为500毫升(ml)。螺旋体通道直径为500μm,膜间厚度为300μm。在其他示例中,膜间厚度可以小于约300μm。例如,膜间厚度可以小于约275、250、225、200、175、150、125、100、75或更小μm。示例3d打印机设备包括带有引流管5801的打印料盘5804。打印料盘5804内的材料通过再循环系统在打印料盘5804内泵送。再循环系统包括包含光固化生物树脂的储存器5806、用于混合生物树脂的磁力搅拌器5805和用于将生物树脂泵送到打印料盘5804中的再循环蠕动泵5807。生物反应器可以安置在打印料盘5804和打印平台5802之间。打印平台5802可以连接到循环滚珠丝杠5803,该循环滚珠丝杠5803被配置为升高打印平台5802。示例
332.在一些示例中,本文提供的可执行指令可以包括用于根据本文别处提供的方法由多个单元、微型模块、单体和元件构造空间或结构的方法。这样的方法可以包括组装多个微型模块以构建宏观结构。宏观结构可包括本文其他地方提供的任何形状,例如球体、棱锥、空心棱锥、层状、棋盘或任何其他宏观结构。在一些示例中,宏观结构可以形成生物反应器。生物反应器可以由使用本文提供的方法组装的多个微型模块构成。该方法可以包括提供数学模型和一个或多个操作符和/或操作以使用计算机实现的方法(例如,软件(例如,本文别处提供的计算机系统))来操纵微型模块(例如,结晶单元或晶体)。
333.本文提供了可用作生物反应器的结构。还提供了构建这种结构的方法。在一些示例中,可以使用本文提供的方法对结构进行3d打印。构建结构的方法可以包括立体光刻和/或晶体光刻。在一些示例中,计算机可读指令可以包括使用多个微型模块构建空间的方法
和构建诸如生物反应器的结构的方法。
334.在一个示例中,可以使用本文提供的方法来制造结构(例如,管道或任何其他结构)。在一些情况下,单体可以由单体或晶格结构的主体内的晶格点分布来定义或模拟。点可以是元素。主体可以是晶体或单体的主体。该元素可以在单体中。例如,在单体或晶格中,点的排列可能表示原子的位置或定位。例如,这些点可以表示为晶格的原子。由于可以连接原子和/或可以将它们保持在适当位置的平衡(例如,静电力的平衡),晶格中的原子可能能够以这样的方式振动以最小化晶格的总表面。在一些情况下,结构可以通过由于放置点或元素而形成的最小化表面来定义。替代地或另外地,在一些情况下,基于可以连接晶格点子集的轨迹来制造和/或定义结构(例如,管道或另一结构)可能是合适的和/或方便的。
335.可以根据本公开的方法构建和使用的结构可以包括一个或多个微型模块。在一些示例中,微型模块可以是生物反应器的构建块。微型模块可以包括一个或多个外部微型模块(例如,构建块)和/或一个或多个内部微型模块(例如,构建块)。在一些示例中,外部和/或内部微型模块(例如,构建块)可以包括一个或多个管道。示例可以包括外部管道,例如本文提供的生物反应器的外部微型模块内的管道。外部微型模块的功能可以包括例如通过将液体和/或气体从诸如储存器的外部源供应到一个或多个内部微型模块中馈送一个或多个内部微型模块。储存器可以是本文别处提供的生物反应器系统的储存器。在一些示例中,外部微型模块可以是本文其他地方提供的生物反应器馈送系统,例如用于将气体和液体供应到生物反应器或其一部分中的系统。
336.在一些示例中,制造内部微型模块或其组件(例如,外部微型模块的管道)的方法可以在某种程度上类似于和/或在某种程度上不同于制造内部微型模块或其组件(例如,生物反应器内部的组件、内部通道、内部管道或生物反应器的内部微型模块的另一组件)的方法。例如,在一些情况下,内部微型模块可以包括或者是单体。单体可以是对称的。在一些示例中,外部微型模块(例如,制作外部馈送系统(例如外部管道)的构建块)可能不是单体和/或可能不是对称的。在一些情况下,外部微型模块的数学或晶体学表示可能驻留在微型模块的输入和/或输出链路中(例如,构建块)。
337.微型模块或构建块可以包括过渡微型模块或构建块。在一些示例中,过渡微型模块可以连接以促进内部微型模块和外部微型模块之间的通信。在一些情况下,过渡微型模块的特性可能取决于内部和外部微型模块和/或外部来源(例如,外部单元,例如储存器或生物反应器系统的另一外部组件)或与之相关。在一个示例中,一个或多个管道和/或通道可以穿过多个相邻体积(例如,两个相邻体积)的一个或多个内部微型模块。过渡微型模块可以连接一个或多个管道或促进它们之间的通信。例如,过渡微型模块可以促进流体在一个管道到另一管道之间的流动。
338.生物反应器的微型模块内的流体流动可以包括涉及流体力学(例如,流动状态)、热分布、组成分布以及各种流体和区域之间的流体递送、热递送和质量递送的特征。在一些示例中,可以考虑、设计和/或控制这些特征和/或特性。在一些情况下,过渡微型模块的设计和/或构造可能会考虑到上述特征。
339.过渡构建块的构造方法可以由可以提供指令(例如,任何种类的可执行指令和/或计算机实现的方法)的用户来执行。在一些示例中,用户可以使用示例绘图工具(例如,autocad或任何其他绘图工具)执行手动设计,并将其提供给本文其他地方提供的计算机实
现的方法,以完成微型模块(例如,内部微型模块、外部微型模块和/或过渡微型模块)的设计和/或构造。在一些情况下,用户的这种设计和构造可能是耗时的。替代地或另外地,构建块(例如,过渡微型模块)的设计可以通过人工智能驱动的生成设计来完成或促进,该生成设计可以至少在一定程度上自动化微型模块的设计和/或构造。在一些情况下,人工智能驱动的生成设计可以改善流体力学(例如流动状态)、热分布、成分分布以及微型模块中的各种流体和区域之间的流体递送、热递送和质量递送等特性。在一些示例中,可以标记需要连接的两个微型模块。替代地或附加地,也可以标记该结构的多个外部变量。标记过程可用于提供可以训练深度学习算法的一组训练数据。在一些示例中,算法可以包括神经网络。算法和/或神经网络的示例可以包括生成对抗网络和变分自动编码器。
340.在一些示例中,可以以数学方式表示结构。结构可以包括或者是内部和/或外部微型模块。在一个示例中,要表示的结构可以是管道。管道可以是内部的或外部的。由晶格点(例如,元素)驱动的管道的数学表示的示例在图49中示出。管道4900的数学表示可以包括一条或多条曲线(例如,参数曲线)4910。曲线4910可以使用多项式方程进行数学表示或公式化。多项式可能适合这种表示,例如因为它们的简单性和性能。多项式可以包括将曲线表示为和/或在各种应用(例如用于构建微型模块和结构)所需的地方的灵活性。在一些示例中,可以使用各种数学方程来表示曲线,可以使用的数学方程的示例可以包括多项式、正弦、余弦、对数、指数和/或任何其他合适的数学方程。在一些示例中,可以使用贝塞尔曲线(例如,在3d中)。在一些情况下,晶格点可以用作控制点和/或曲线的极端。极端点的示例可以包括图49中的点a、b、c、d和e。控制点的示例可以包括图49中的点c
a1
、c
a2
、c
b1
、c
b2
、c
c1
、c
c2
、c
d1
和c
d2
。
341.本文提供了用于室的数学表示的方法。在一些示例中,室可以在微型模块内。在一些示例中,室可以是从穿过晶格点的路径的交叉处得到的形状。表示可能会根据室的类型和结构以及其他因素而不同。在一些示例中,管道或通道可以例如从穿过晶格点的碰撞路径生成室。在每种情况下的设计可以取决于可以使用这种管道和/或室的生物反应器的特性。对此的示例表示在图50中示出。在该图中c
p1
和c
p3
是a的控制点。c
p1
和c
p2
是c的控制点。c
p2
和c
p3
是b的控制点。
342.在一些情况下,可以使用诸如数学函数或数学运算符之类的函数来生成室。例如,可以通过用于曲线(例如,3d曲线)的相交函数来生成室。在一些情况下,可能不需要进一步建模来完成室的表示和/或构建它。或者,在一些情况下,对于至少执行该过程的步骤的子集而言,进一步的建模可能是合适的、有帮助的或需要的。图51a示出了示例结构的示例表示5100。表示5100可以是隐式室。在一些示例中,当两条或更多条路径(例如,诸如曲线5110之类的2d或3d曲线之类的曲线)可以到达同一点(例如,在同一点处相交,例如在相交点5120处)时,相交数学函数或运算符可以联接、连接和/或统一两条曲线或路径,从而形成诸如结构之类的形状。根据用于在曲线之间建立连接的相交函数,相交点可以是平滑的(例如,相交点5120),也可以是尖锐的,例如棱锥或其他结构的边缘(示例未示出)。生成的结构(例如,表示5100)可以是任何结构。例如,曲线可以是管道和/或通道,它们可以在一点相交,相交函数可以连接和/或联接它们并且可以对它们进行一些进一步的修改以生成诸如室的结构。作为示例,用于生成表示5100的相交函数是精确的相交函数。使用该方法生成结构的另一示例在图51b中示出。可以采用类似的方法来生成图51b所示的表示5130。作为示
例,用于制作表示5130的相交函数是指数平滑相交函数。表示5130可以是隐式室。
343.在一些示例中,诸如室的结构和/或其表示可以是显式的(例如,显式室)。隐式或显式结构或其表示的选择可能取决于所得微型模块或结构(例如生物反应器)的目标特性。在一些情况下,诸如室的结构或其表示可以是参数化的。结果可能取决于用于生成结构(例如,室)的方法而不同。
344.在一些示例中,可以组装多个单体以生成微型模块。例如,单体可用作体素以体素化诸如生物反应器的微型模块或整个生物反应器的结构。微型模块可以是整个结构的构建块。在一些情况下,微型模块或构建块可能会从可用于生成微型模块的单体继承一些属性。例如,在一些情况下,单体的相对面可以彼此平行。在一些情况下,两个微型模块或构建块的相邻面可以连接等效链路。在一些情况下,可以使用示例单体作为体素来构建体素化结构(例如,上部体素化结构)。单体可以包括本文列出的任何形状,例如立方体或其他形状(例如,在表1.1中提供)。
345.通过单体的组装制造结构的示例在图52中示出。该图示出了3d球体及其使用立方单体的体素化表示。在一些示例中,该方法的第一步可以是定义要构建的结构的形状。例如,结构的形状可以由数学方程(例如,参数方程)和构造立体几何的混合来定义。结构的形状(例如,宏观结构)可以定义为3d对象(例如,完美的3d形状),在一些情况下,无论用于构造它的单体或体素的形状如何。在一些示例中,要构造的结构可以是宏观结构,例如生物反应器。在一些情况下,要构造的结构可以是微型模块。作为示例,一旦定义了宏观结构(例如,球体5200)的几何形状,就可以执行体素化以将宏观结构表示为多个单体或体素(例如,单体或体素5210)的集合。在一些情况下,体素化可以根据单体的类型进行(例如,参见表1.1)。在一些示例中,为了体素化的目的,可以忽略单体内的晶格点的布置。在此过程中,可以创建微型模块和/或构建块。整个宏观结构可以包括多个这样的微型模块或构件块。这样的微型模块和/或构建块可以包括内部的、外部的、过渡的和/或本文其他地方提供的任何种类的微型模块或构建块。
346.下一步可以包括在结构中结合管道,例如在微型模块和/或构建块内。管道的特性可以是准确的并且可以变得统一(例如,根据本文别处描述的方法)。管道可以包括延长的管道,该管道可以在整个生物反应器的结构中携带气体和液体。外部连接器
347.在一些示例中,该结构可以包括多个外部连接器。例如,该结构可以包括图47所示的多个摄入通道(例如,通道4720或4730)。例如,诸如生物反应器(例如,生物反应器4700)的结构可以包括至少约1、2、3、4、5、6、7、8、9、10、12、20或更多个摄入通道,包括其中的增量。在一些情况下,具有相对较少数量的摄入通道可能是合适的,或者在一些情况下,最小化摄入通道的数量。该结构还可以包括多个通道,例如内部通道(例如,图48中所示的通道4810和4820)。通道可以是管道。外部连接器(例如,摄入通道,例如,通道4720或4730)可以馈送内部通道(例如,通道4810和4820)。通道可以是管道(例如,图19中所示的管道1905)。结构可以有任意数量的管道。在一些示例中,结构可以包括从一到几百万条管道(包括其间的任何数量)。在通道和/或管道之间,在一些情况下,在生物反应器的所有通道之间,生成适当的(例如,均匀的)气体和/或液体分布可能是合适的。在一些情况下,具有多个摄入通道可能是合适的,使得控制它们会变得更加方便和高效。在一些情况下,构建结构的方法
(例如,程序设计)可以包括跟踪来自外部构建块或微型模块的摄入通道和/或将管道连接到不同种类的外部连接器中。在一些情况下,连接器可能已经预先测试,以确保摄入和输出通道可以通过结构的通道(例如,管道)均匀地分配进入流量。树状连接器
348.本文提供的结构可以包括一个或多个连接器。结构可以是本文提供的生物反应器,其可以使用本公开的方法进行3d打印。诸如生物反应器的结构或可根据本文提供的方法进行3d打印的另一结构可包括一个或多个连接器。连接器可以包括各种形状和形式。连接器的示例可以包括树状连接器。树状连接器的示例在图53中示出。这些连接器的形状可能对应于树的形状。例如,示例树的根可以表示外部连接器(例如,生物反应器外表面上的连接器)。树的叶子可以表示来自生物反应器外部微型模块的摄入通道。在一些示例中,逐级输入摄入通道的数量可以被正数(例如,整数》1)细分,直到达到一个通道。得到的一个通道可能是表示外部连接器的树的根。
349.不同形状的连接器的示例可以包括树状连接器、单面连接器和其他形状的连接器。在一些示例中,单面连接器的形状可以在不同的设计中不同。在单面连接器中,外部连接器可以填充室,该室可以包括一个或多个通道或管道(例如,多个管道),该通道或管道(例如,多个管道)可以连接到外部微型模块(例如,外部构建块)的摄入通道。在一些示例中,为了促进流体在管道之间的平均和/或均匀分布,例如一旦室被填满,可以调节连接器、室和/或管道的宽度以允许将目标量的流体填充到管道中。
350.本文提供了架构设计和结构(例如,生物反应器)的架构设计方法。在一些示例中,该方法可以包括功能化微型模块(例如,构建块)。在一些示例中,构建块和/或微型模块可以通过链路(例如,图19中所示的链路1915)彼此连接。图19中所示的晶胞可以是包括多个面(例如,面1910和1920)和多个管道(例如,管道1905)的微型模块的示例。这种晶胞或微型模块可以通过链路(例如,链路1915)连接到其他单体、微型模块或构建块。在一些示例中,链路(例如,链路1915)可以是外部链路并且可以位于微型模块的一个或多个面(例如,面1910)中。微型模块可以表示为晶胞。在一些情况下,微型模块的示例可以是重复单元,例如图48中所示的构建块4860。在一些情况下,链路可以定位在两个或更多个面的边缘之上,例如在图19所示的单体的几何形状(例如,立方体或其他形状)的一侧。在一些示例中,链路可以由两个以上的面共享,例如三个或更多个面,并且它可以定位在构建块的顶点上,例如在图19所示的立方体晶胞的顶点上,或任何其他形状或种类的晶胞上。在一些示例中,如果两个或更多个相邻块(例如,相邻的微型模块或相邻的晶胞)在要连接的面内共享相同的位置并且如果附接到它们的链路共享相同的横截面形状,则它们可以是可匹配的(例如,可连接的)。然后该链路可以连接到两个相邻的微型模块。
351.在一些示例中,生物反应器的设计可以包括可以相互连接的不同数量的相体积。在一些情况下,相体积对于由多个内部微型模块(例如,构建块)构成的宏观结构可能很重要。例如,在一些情况下,用于连接微型模块和/或构建块的方法可以包括考虑这种微型模块内部的介质。例如,微型模块可以被配置为允许诸如气体或液体的流体在其中流动。这种微型模块的示例可以是(例如,生物反应器的)管道或通道或另一结构。例如,由于连接两个相邻的管道,可以构建一致的统一管道,并且在这些管道中传输的介质也可以匹配。这种匹配可以通过标记在构建块或微型模块中使用的管道(例如,在相体积内)来完成。在一些示
例中,此类标签还可以与诸如压力、热量、流体成分等属性相关联。在一些示例中,可能需要保留此类属性。例如,这些属性可能不会因为连接构建块或微型模块而被破坏。在一个示例中,两个管道可以彼此连接,每个管道可以具有在其中流动的流体,每个流体可以包括一组特性,例如流速、温度、压力、成分等。管道可以在考虑这些特性的同时进行连接,使得作为连接管道的结果,在合适的条件下这些特性将被保留或保持。这可以通过本文描述的标记方案来实现。在一些示例中,例如在最终确定结构设计之前测试、研究和/或验证了许多这样的考虑。
352.微型模块或构建块可以包括过渡微型模块和/或构建块。过渡微型模块可以包括过渡相体积。微型模块的过渡相体积可以考虑由要连接的过渡微型模块构成的相体积以及那些过渡微型模块的相邻相体积的合适特性。
353.在一些示例中,连接器可以被配置为在生物反应器的外部构建块或微型模块中,将介质(例如,流体,例如气体或液体)从生物反应器外部运送到输入管道或摄入通道(例如,摄入通道,例如摄入通道4720或4730),在一些情况下运送到所有摄入通道。连接器可以包括多个级别。连接器可以包括较低级别的连接器。在一些示例中,较低级别的连接器(例如,第一级连接器)可以包括可以将管道转变为更大的摄入通道的结构,其可以在生物反应器(例如,生物反应器4700)的外部逐渐产生多个摄入通道(例如,摄入通道4720或4730)。
354.连接器还可以包括高级或较高级别的连接器。较高级别的连接器可以从较低级别的连接器逐步(例如,逐层地)构建更大的摄入通道。这样的连接器可以是外部连接器、树状连接器和/或单面连接器,其功能可以根据本文其他地方提供的信息。模拟和模型
355.本文提供了用于建模和/或模拟单体(例如,晶胞)及其行为和/或功能的方法。这样的模拟可以有助于基于预期应用和/或关于所生成的生物反应器的预期结果来确定设计特性。模拟可以包括计算模拟和/或数值模拟。模拟或模型的示例可以包括积分模拟、lattice boltzmann模拟、有限元模拟、功能性微流体反馈和校正(例如,在第二和/或第三级)、相位连续性和其他方法。
356.作为示例,有限元分析(fea)可用于解决与设计和/或构造本公开的结构有关的问题。在一些示例中,fea可用于预测、建模和/或模拟3d或3d模型关于各种因素的行为,这些因素包括外力、热量、流体流动和其他因素,例如物理现象。在一些情况下,可以在产品开发过程中使用模拟作为改进设计质量的反馈。在一些情况下,fea可以从将对象细分为多个有限元(例如,数百万个有限元)开始。这可能是预测的效率和准确性的重要过程。在一些情况下,执行fea可能会很耗时,例如,由于晶体结构的拓扑结构。将结构划分为有限元的方式对于模型的效率和/或准确性可能很重要。
357.在一些示例中,建模或模拟可以包括格子玻尔兹曼方法。在一些示例中,lattice boltzmann模拟可以与模型或结构的隐式表示兼容。该方法还可以包括使用函数来提高lattice boltzmann模拟的性能和/或准确性。在一些示例中,这样的函数可以是数学函数或运算符,例如符号距离函数。
358.晶体结构的模拟方法可以包括构建块的预计算。在一些示例中,构建块或微型模块可以基本相似,在一些情况下,相同。可以执行具有有限数量(例如,少量样本)样本的微型模块的分类。例如,可以使用不同数量的输入变量对样本子集或所有样本进行预计算实
验。预计算可用于加速生物反应器的模拟。可以对结构的子集(例如,样本)执行预计算。在一些示例中,可以改进内部和外部微型模块或构建块的设计。这种改进可能与作为整体的生物反应器的宏观结构无关。或者,在一些情况下,也可以考虑生物反应器的宏观结构。
359.在一些示例中,方法和系统可以包括模拟的数据库以及制造和使用模拟的方法。例如,计算和执行的模拟可以保存并存储在数据库中。模拟的数据库可用于提供对后续模拟的洞察。可以以给定的速度执行模拟。可以通过使用先前的计算来增加模拟的速度。在一些情况下,可以提供更快的近似。例如,这种近似可以基于存储在模拟的数据库中的信息或存储在别处的其他计算。这可以使模拟的计算成本更低。
360.本公开的方法可以包括人工智能和/或机器学习。在一些示例中,信息子集可以为算法(例如,基于深度学习的ai驱动的平台)提供训练数据。这样做的目的可以包括生成更快和/或更好的预测和模拟。在一些示例中,标记微型模块或构建块可以有助于存储先前的模拟和/或从实验或预计算得出的元信息。在一些示例中,模拟的数据库可以用于存储这样的数据。训练数据可用于训练模型。平台(例如,ai驱动的平台)可以通过执行更快、更高效和/或更准确的模拟来提供信息。根据本文提供的方法,这可能是产品开发周期的一部分。一种方法可以包括用户执行的模拟、ai执行的模拟和/或它们的组合。该方法可以包括迭代过程。使用ai可以提高迭代的速度、效率和/或准确性。产生的设计和/或生产配置可以包括建设性考虑和功能性考虑以及其他因素。示例设计特性可以包括机械强度、工业兼容性等。
361.尽管本文已经示出和描述了本主题的优选实施方式,但是对于本领域技术人员来说容易理解的是,这些实施方式仅作为示例提供。在不背离本主题的情况下,本领域技术人员现在将想到许多变化、改变和替换。应当理解,在实践本主题时可以采用对在此描述的本主题的实施方式的各种替代方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1