弯曲加工系统及其使用方法与流程
1.本发明涉及对板状的工件自动地进行弯曲加工的弯曲加工系统及其使用方法。
背景技术:
2.近年来,在钣金加工的领域中,正在普及弯曲加工系统,简单地说明弯曲加工系统的结构等的话,如下(参照专利文献1)。
3.弯曲加工系统具备对工件进行弯曲加工的弯扳机。在弯扳机与配置于其前方的预定的设定区域之间设置有对工件的弯曲加工进行辅助的弯曲机器人。弯曲机器人具有对设定于预定的设定区域的托盘上的工件进行保持的机器人手。并且,在预定的设定区域的上方设置有从铅垂上方向拍摄托盘上的工件的作为拍摄单元的照相机。在预定的设定区域的左侧附近设置有朝向照相机的拍摄范围照射照明光的第一照明单元。在预定的设定区域的右侧附近设置有朝向照相机的拍摄范围照射照明光的第二照明单元。
4.弯曲加工系统具备控制弯扳机的数值控制装置、控制弯曲机器人的机器人控制装置、以及对来自照相机的拍摄图像进行图像处理的图像处理装置。图像处理装置基于来自照相机的拍摄图像,检测托盘上的工件的位置。机器人控制装置基于检测到的工件的位置,以使机器人手保持工件的预定部位的方式控制弯曲机器人。因此,即使不将工件正确地载置于托盘上的预定部位,也能够使弯曲机器人适当地动作,充分地确保弯曲加工的加工精度。
5.此外,作为关联的现有技术,除了专利文献1以外,还有专利文献2至专利文献4所示的技术。
6.现有技术文献
7.专利文献
8.专利文献1:日本特开2018-120388号公报
9.专利文献2:日本特开2017-124469号公报
10.专利文献3:日本特开2015-13303号公报
11.专利文献4:日本特开2019-14027号公报
技术实现要素:
12.然而,在现有的弯曲加工系统中,照相机位于预定的设定区域的上方,未与预定的设定区域充分地分离。两个照明单元位于预定的设定区域的附近,未与预定的设定区域充分地分离。其结果,为了使弯曲机器人的一部分以及机器人手所保持的工件不与照相机等干涉,限制弯曲机器人的动作范围,从而产生很多无法对工件进行弯曲加工的例子。也就是说,存在难以在充分地确保弯曲加工的加工精度的同时提高弯曲加工系统的加工自由度的问题。
13.本发明的第一实施方式的弯曲加工系统具备:弯曲机器人,其设置在弯扳机与配置于其前方的预定的设定区域之间,具有对设定于上述预定的设定区域的托盘上的工件进
行保持的机器人手,且对工件的弯曲加工进行辅助;以及拍摄单元,其设置于上述预定的设定区域的前上方,从斜上方向拍摄上述托盘上的工件。本实施方式的弯曲加工系统具有:第一照明单元,其竖立设置于上述预定的设定区域的左前方,朝向上述拍摄单元的拍摄范围照射照明光;以及第二照明单元,其竖立设置于上述预定的设定区域的右前方,朝向上述拍摄单元的拍摄范围照射照明光。
14.在第一实施方式的弯曲加工系统的结构的基础上,第二实施方式的弯曲加工系统构成为,上述第一照明单元具有向右斜下方向照射照明光的多个第一照明,各第一照明的照射方向构成为能够调整,以便将来自上述多个第一照明的照明光照射到上述托盘上的整个区域。并且,上述第二照明单元具有向左斜下方向照射照明光的多个第二照明,各第二照明的照射方向构成为能够调整,以便将来自上述多个第二照明的照明光照射到上述托盘上的整个区域。
15.根据第一实施方式及第二实施方式的弯曲加工系统的结构,如上所述,由于上述拍摄单元位于上述预定的设定区域的前上方,所以能够使上述拍摄单元与上述预定的设定区域充分地分离。由于上述第一照明单元位于上述预定的设定区域的左前方且上述第二照明单元位于上述预定的设定区域的右前方,所以能够使上述第一照明单元及上述第二照明单元与上述预定的设定区域充分地分离。因此,上述弯曲机器人的一部分或上述机器人手所保持的工件不会与上述拍摄单元、上述第一照明单元或上述第二照明单元干涉,上述弯曲机器人的动作范围不会被上述拍摄单元等限制。
16.第三实施方式的弯曲加工系统的使用方法是用于使用第二实施方式的弯曲加工系统的方法。而且,在利用调整片覆盖了上述托盘上的整个区域的状态下,调整各第一照明的照射方向,以便将来自安装于各第一照明的调整夹具的激光指示器的可见光照射到上述调整片中的与各第一照明的照射范围对应的部位。并且,调整各第二照明的照射方向,以便将来自安装于各第二照明的上述调整夹具的上述激光指示器的可见光照射到上述调整片中的与各第二照明的照射范围对应的部位。
17.第四实施方式的弯曲加工系统的使用方法是用于使用第二实施方式的弯曲加工系统的方法。而且,在上述拍摄单元从斜上方向拍摄上述托盘上的工件时,执行上述第一照明单元的照明动作,以便将来自上述多个第一照明的照明光照射到上述托盘上的整个区域。并且,执行上述第二照明单元的照明动作,以便将来自上述多个第二照明的照明光照射到上述托盘上的整个区域。
18.根据上述弯曲加工系统及其使用方法,能够充分地确保弯曲加工的加工精度,并且提高弯曲加工系统的弯曲加工的自由度。
附图说明
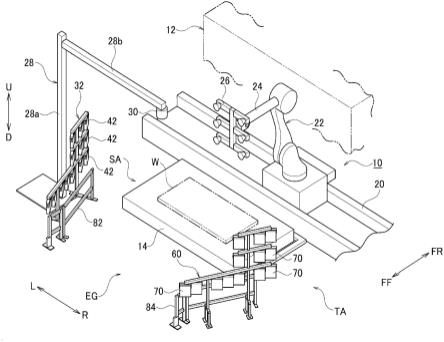
19.图1是第一实施方式的弯曲加工系统的立体图。
20.图2是第一实施方式的弯曲加工系统的俯视图。
21.图3是第一实施方式的弯曲加工系统的主视图。
22.图4是示出设置于预定的设定区域的多个台座的立体图。
23.图5a是从照射侧的相反侧(背侧)观察到的第一照射台的图。
24.图5b是从图5a的右侧观察到的第一照射台的图。
25.图6是图5a中的vi部的放大图。
26.图7a是从照射侧(表侧)观察到的带托架的照明(第一照明或第二照明)的图。
27.图7b是从照射侧的相反侧观察到的带托架的照明的图。
28.图8a是带托架的照明的立体图。
29.图8b是带托架的照明的立体图,示出在带托架的照明安装有调整夹具的情形。
30.图9是说明各第一照明的照射范围的图。
31.图10a是从照射侧的相反侧(背侧)观察到的第二照射台的图。
32.图10b是从图10a的左侧观察到的第二照射台的图。
33.图11是图10a中的xi部的放大图。
34.图12是说明各第二照明的照射范围的图。
35.图13是说明调整片中的与各第一照明的照射范围对应的部位的图。
36.图14是说明调整片中的与各第二照明的照射范围对应的部位的图。
37.图15是第二实施方式的弯曲加工系统的立体图。
38.图16是第二实施方式的弯曲加工系统的俯视图。
39.图17是第二实施方式的弯曲加工系统的主视图。
具体实施方式
40.以下,参照图1至图17对第一实施方式以及第二实施方式进行说明。
41.此外,在本技术的说明书以及权利要求书中,“设置”是指除了直接设置之外,还包括经由其它部件间接设置的情况。“竖立设置”是指以竖立的状态设置。“左右方向”是水平方向之一,和与弯扳机的宽度方向平行的方向同义。“前后方向”是与左右方向正交的水平方向,和与弯扳机的进深方向平行的方向同义。“保持”是包括吸附以及把持的含义。附图中,“ff”是指前方向,“fr”是指后方向,“l”是指左方向,“r”是指右方向,“u”是指上方向,“d”是指下方向。
42.(第一实施方式)
43.如图1至图3所示,第一实施方式的弯曲加工系统10是对板状的工件(金属板)w自动地进行弯曲加工的加工系统。弯曲加工系统10具备通过阳模(省略图示)与阴模(省略图示)的协作来对工件w进行弯曲加工的弯扳机12。
44.在弯扳机12的前方形成有用于设定托盘14的预定的设定区域(搬入区域)sa。托盘14支撑工件w。换言之,在弯扳机12的前方形成有用于经由托盘14向弯曲加工系统10搬入工件w的搬入区域sa。托盘14由叉式升降机(省略图示)或手动升降机(省略图示)设定于预定的设定区域sa。此外,在预定的设定区域的右侧形成有用于从弯曲加工系统10经由产品托盘(省略图示)搬出弯曲产品的搬出区域ta。
45.如图1及图4所示,在预定的设定区域sa的地板面,经由低头螺栓18以及锚固件(省略图示)设置有支撑托盘14的多个台座16。在各台座16与地板面之间夹设有用于调整各台座16的高度位置的对开状的多个垫片(省略图示)。因此,通过调整各台座16的高度位置,能够充分地确保设定于预定的设定区域sa的托盘14的上表面的平坦度。
46.如图1至图3所示,在弯扳机12与预定的设定区域sa之间设置有沿左右方向延伸的导向框架20。在导向框架20,以能够沿左右方向移动的方式设置有对工件w的弯曲加工进行
辅助的弯曲机器人22。换言之,在弯扳机12与预定的设定区域sa之间,弯曲机器人22设置为能够经由导向框架20沿右方向移动。弯曲机器人22例如由专利文献2所示的公知的结构构成,具有多关节的机器人臂24。弯曲机器人22具有以能够装卸的方式设置于机器人臂24的前端部的机器人手26。机器人手26对设定于预定的设定区域sa的托盘14上的工件w进行吸附。此外,如专利文献3以及专利文献4所示,机器人手26也可以具有把持工件w的端部的夹持件(省略图示)。
47.在预定的设定区域sa的左前方的地板面竖立设置有l字状的支柱28,支柱28具有铅垂部(垂直部)28a和设置于铅垂部28a的上部的水平部28b。在支柱28的水平部28b的前端部设置有从斜上方向对设定于预定的设定区域sa的托盘14上的工件w进行拍摄的作为拍摄单元的单反式的照相机30。换言之,在预定的设定区域sa的前上方,经由支柱28设置有照相机30。作为拍摄元件,照相机30具有ccd(charge coupled device:电荷耦合器件)或cmos(complementary metal oxide semiconductor:互补金属氧化物半导体)。此外,也可以使用立体照相机(省略图示)来代替单反式的照相机30。
48.如图1至图3所示,在预定的设定区域sa的左前方,竖立设置有朝向照相机30的拍摄范围照射照明光的作为第一照明单元的第一照明台32。第一照明台32以其右端侧位于比左端侧靠前方的方式相对于左右方向倾斜地配置。而且,第一照明台32的各构成部件的具体内容如下。
49.如图1、图3、图5a、图5b以及图6所示,在预定的设定区域sa的左前方竖立设置有第一支撑框架34。第一支撑框架34具有沿水平方向延伸的多个(在本实施方式中为三个)第一梁部件36。在各第一梁部件36经由安装螺栓40设置有倒u字形状的第一托架38。第一托架38能够绕作为铅垂的轴心的安装螺栓40的轴心转动。
50.在各第一托架38经由安装螺栓44设置有向右斜下方向照射照明光的第一照明42。换言之,第一照明台32具有多个(在本实施方式中为13个)第一照明42。来自多个第一照明42的照明光在设定于预定的设定区域sa的托盘14上的工件w的右侧及后侧的边缘部(轮廓部)形成阴影,使这些边缘部变得明确。
51.如图6至图9所示,各第一照明42能够绕作为水平的轴心的安装螺栓44的轴心转动。各第一照明42能够与第一托架38一体地绕安装螺栓40的轴心转动。在各第一托架38的各侧面形成有圆弧状的狭缝38s。在各第一照明42的各侧面设置有作为可动件的可动螺栓46,各可动螺栓46在被各第一托架38的狭缝38s引导的状态下移动。并且,各第一照明42具有:设置于各第一托架38且表侧(照射侧)敞开的矩形箱状的照明主体48;设置于照明主体48的表侧的丙烯酸面板50;以及设置在照明主体48内的多个发光二极管(led)52。
52.如上所述,各第一照明42构成为能够绕正交的两个轴心转动。即,各第一照明42的照射方向构成为能够调整,以便将来自多个第一照明42的照明光照射到托盘14上的整个区域(参照图9)。上述正交的两个轴心是指水平的轴心以及铅垂的轴心。图9中,对各第一照明42标注用于识别的下标数字(421~42
13
)。对各第一照明42的照射范围c标注用于识别的下标数字(c1~c
13
)。并且,在进行各第一照明42的照射方向的调整时,使用调整夹具54。调整夹具54具有:能够磁吸附于各照明主体48的适当位置的夹具主体56;以及设置于夹具主体56且照射可见光的激光指示器58。
53.如图1至图3所示,在预定的设定区域sa的右前方,竖立设置有朝向照相机30的拍
摄范围照射照明光的作为第二照明单元的第二照明台60。第二照明台60以其左端侧位于比右端侧靠前方的方式相对于左右方向倾斜地配置。第二照明台60在左右方向上与第一照明台32分离,在第一照明台32与第二照明台60之间形成有用于使托盘14相对于预定的设定区域sa出入的出入通路eg。而且,第二照明台60的各构成部件的具体内容如下。
54.如图1、图3、图10a、图10b以及图11所示,在预定的设定区域sa的右前方竖立设置有第二支撑框架62。第二支撑框架62具有沿水平方向延伸的多个(在本实施方式中为三个)第二梁部件64。在各第二梁部件64经由安装螺栓68设置有倒u字形状的第二托架66。第二托架66能够绕作为铅垂的轴心的安装螺栓68的轴心转动。
55.在各第二托架66经由安装螺栓72设置有向左斜下方向照射照明光的第二照明70。换言之,第二照明台60具有多个(在本实施方式中为13个)第二照明70。多个第二照明70在设定于预定的设定区域sa的托盘14上的工件w的左侧以及后侧的边缘部(轮廓部)形成阴影,使这些边缘部变得明确。
56.如图7a、图7b、图8a、图8b、图10a至图12所示,各第二照明70能够绕作为水平的轴心的安装螺栓72的轴心转动。各第二照明70能够与第二托架66一体地绕安装螺栓68的轴心转动。在各第二托架66的各侧面形成有圆弧状的狭缝66s。在各第二照明70的各侧面设置有作为可动件的可动螺栓74,各可动螺栓74在被各第二托架66的狭缝66s引导的状态下移动。并且,各第二照明70具有:设置于各第二托架66且表侧(照射侧)敞开的矩形箱状的照明主体76;设置于照明主体76的表侧的丙烯酸面板78;以及设置在照明主体76内的多个发光二极管(led)80。
57.如上所述,各第二照明70构成为能够绕正交的两个轴心转动。即,各第二照明70的照射方向构成为能够调整,以便将来自多个第二照明70的照明光照射到设定于预定的设定区域sa的托盘14上的整个区域(参照图12)。图12中,对各第二照明70标注用于识别的下标数字(701~70
13
)。对各第二照明70的照射范围c标注用于识别的下标数字(c1~c
13
)。并且,在调整各第二照明70的照射方向时,如上所述地使用调整夹具54。调整夹具54的夹具主体56能够磁吸附于各照明主体76的适当位置。
58.如图1至图3所示,在第一照明台32的右侧附近设置有保护第一照明台32的第一保护件82。第一保护件82沿第一照明台32配置。在第二照明台60的左侧附近设置有保护第二照明台60的第二保护件84。第二保护件84沿第二照明台60配置。并且,在弯曲加工系统10的大部分的周围设置有用于确保弯曲加工的安全性的安全栅栏86。安全栅栏86具有用于使叉式升降机或手动升降机通过的多个门(省略图示)。
59.虽然省略图示,但弯曲加工系统10具备控制弯扳机12的数值控制装置(主控制装置)和控制弯曲机器人22的机器人控制装置。弯曲加工系统10具备控制第一照明台32及第二照明台60的照明控制装置、以及对照相机30的拍摄图像进行图像处理的图像处理装置。照明控制装置分开执行来自多个第一照明42的照明光的照射动作和来自多个第二照明70的照明光的照射动作。图像处理装置对因照相机30的拍摄方向相对于铅垂方向的倾斜导致的照相机30的拍摄图像的失真进行校正。图像处理装置基于照相机30的校正后的拍摄图像来检测托盘14上的工件w的位置。机器人控制装置基于检测到的工件w的位置来以使机器人手26保持工件w的预定部位的方式控制弯曲机器人22。因此,即使不将工件w正确地载置于托盘14上的预定部位,也能够使弯曲机器人22适当地动作,充分地确保弯曲加工的加工精
度。
60.接下来,对第一实施方式的弯曲加工系统的使用方法进行说明。
61.如图9及图13所示,在利用白色的调整片fs覆盖了托盘14的整个区域的状态下,调整各第一照明42的照射方向,以便将来自安装于各第一照明42的调整工具54的激光指示器58(参照图8b)的可见光照射到调整片fs中的与各第一照明42的照射范围c对应的部位p。由此,能够进行第一照明台32的照明光的调整。图13中,对各第一照明42标注用于识别的下标数字(421~42
13
)。对与各第一照明42(421~42
13
)的照射范围c(c1~c
13
)对应的部位p标注用于识别的下标数字(p1~p
13
)。
62.并且,如图12及图14所示,在利用调整片fs覆盖托盘14上的整个区域的状态下,调整各第二照明70的照射方向,以便将来自安装于各第二照明70的调整夹具54的激光指示器58(参照图8b)的可见光照射到调整片fs中的与各第二照明70的照射范围c对应的部位p。由此,能够进行第二照明台60的照明光的调整。图14中,对各第二照明70标注用于识别的下标数字(701~70
13
)。对与各第二照明70(701~70
13
)的照射范围c(c1~c
13
)对应的部位p标注用于识别的下标数字(p1~p
13
)。
63.如图1至图3所示,在照相机30从斜上方向拍摄托盘14上的工件w时,执行第一照明台32的照明动作,以便将来自多个第一照明42的照明光照射到托盘14上的整个区域。于是,能够在托盘14上的工件w的右侧及后侧的边缘部形成阴影,使这些边缘部变得明确。由于多个第一照明42向右斜下方向照射照明光,所以能够由照相机30识别托盘14上的工件w的左侧及前侧的边缘部的端面,不需要在这些边缘部形成阴影。并且,执行第二照明台60的照明动作,以便将来自多个第二照明70的照明光照射到托盘14上的整个区域。于是,能够在托盘14上的工件w的左侧及后侧的边缘部形成阴影,使这些边缘部变得明确。由于多个第二照明70向左斜下方向照射照明光,所以能够由照相机30识别托盘14上的工件w的右侧及前侧的边缘部的端面,不需要在这些边缘部形成阴影。使第一照明台32的照明动作与第二照明台60的照明动作的执行时机错开。通过使托盘14上的工件w的右侧、左侧以及后侧的边缘部变得明确,图像处理装置容易通过图案匹配来检测工件w的位置。
64.接下来,对第一实施方式的作用效果进行说明。
65.如上所述,由于照相机30位于预定的设定区域sa的前上方,所以能够使照相机30与预定的设定区域sa充分地分离。由于第一照明台32位于预定的设定区域sa的左前方且第二照明台60位于预定的设定区域sa的右前方,所以能够使第一照明台32及第二照明台60与预定的设定区域sa充分地分离。因此,弯曲机器人22的一部分或机器人手26所吸附的工件w不会与照相机30、第一照明台32以及第二照明台60干涉。换言之,吸附工件w的弯曲机器人22的动作范围不会被照相机30等限制。因此,根据第一实施方式,能够充分地确保弯曲加工的加工精度,并且提高弯曲加工系统10的弯曲加工的自由度。
66.如上所述,第一照明台32以其右端侧位于比左端侧更靠前方的位置的方式相对于左右方向倾斜地配置。第二照明台60以其左端侧位于比右端侧靠前方的位置的方式相对于左右方向倾斜地配置。在第一照明台32与第二照明台60之间形成有出入通路eg。因此,能够进行托盘14相对于预定的设定区域sa的出入,并且能够在预定的设定区域sa的周边充分地确保作业人员的动线。其结果,根据第一实施方式,能够提高弯曲加工系统10的作业性及操作性。
67.如上所述,在第一照明台32的右侧附近设置有第一保护件82,在第二照明台60的左侧附近设置有第二保护件84。因此,根据第一实施方式,能够充分地防止因与叉式升降机或手动升降机的接触导致的第一照明台32或第二照明台60的损伤。
68.(第二实施方式)
69.如图15至图17所示,与第一实施方式的弯曲加工系统10(参照图1)相同,第二实施方式的弯曲加工系统88是对工件w自动地进行弯曲加工的加工系统。弯曲加工系统88除了一部分以外,具有与弯曲加工系统10相同的结构,对弯曲加工系统88的结构中的与弯曲加工系统10不同的结构等进行说明。此外,在附图中,对弯曲加工系统88的多个构成部件中的与弯曲加工系统10的构成部件对应的构成部件标注同一符号。
70.在预定的设定区域sa的左前方竖立设置有朝向照相机30的拍摄范围照射照明光的第一照明台32。第一照明台32沿左右方向平行地配置。在预定的设定区域sa的右前方竖立设置有朝向照相机30的拍摄范围照射照明光的第二照明台60。第二照明台60沿左右方向平行地配置。此外,第一照明台32及第二照明台60也可以分别具有带制动器的脚轮(省略图示)。也可以在第一照明台32的附近设置保护第一照明台32的第一保护件(省略图示)。也可以在第二照明台60的附近设置保护第二照明台60的第二保护件(省略图示)。
71.接下来,对第二实施方式的作用效果进行说明。
72.与第一实施方式的作用相同,能够使第一照明台32及第二照明台60与预定的设定区域sa充分地分离。因此,弯曲机器人22的一部分或机器人手26所吸附的工件w不会与照相机30、第一照明台32以及第二照明台60干涉。换言之,吸附工件w的弯曲机器人22的动作范围不会被照相机30等限制。因此,根据第二实施方式,能够充分地确保弯曲加工的加工精度,并且提高弯曲加工系统88的弯曲加工的自由度。
73.此外,本发明不限定于上述几个实施方式的说明,通过进行适当的变更,能够以其它各种方式实施。而且,本发明所包含的权利范围并不限定于上述的实施方式。
74.此处引用日本特愿2020-089699(申请日:2020年5月22日)的全部内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1