焊接系统和焊接方法与流程
本发明涉及一种将导线焊接到焊垫上的焊接系统和焊接方法。
背景技术:
1、在制造通信产品时,经常需要将导线焊接到焊垫上。为了保证数据的高速传输,必须保证导线和焊垫之间具有高的焊接精度。
2、在现有技术中,为了使导线与焊垫对准,通常采用夹具来夹持和对准导线和焊垫。但是,随着通信产品的小型化,导线的直径变得越来越小,利用夹具很难保证导线与焊垫精确对准,这导致导线和焊垫之间总是存在位置误差,无论如何设计夹具,都无法避免。
技术实现思路
1、本发明的目的旨在解决现有技术中存在的上述问题和缺陷的至少一个方面。
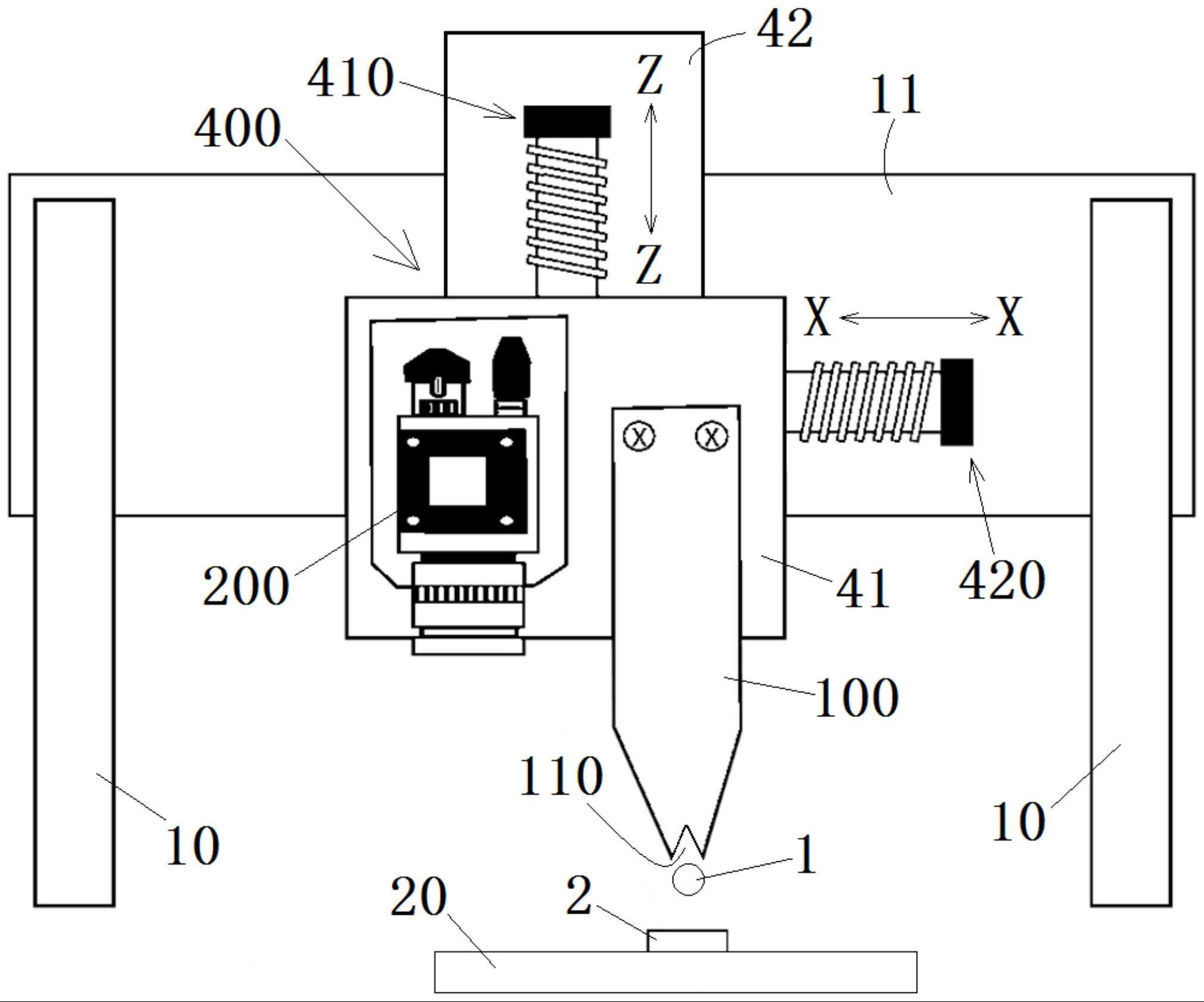
2、根据本发明的一个方面,提供一种焊接系统,用于将导线焊接到焊垫上。所述焊接系统包括:移动装置,能够沿至少两个不同的方向移动;焊头,安装在所述移动装置上,以能够随所述移动装置一起移动;和视觉装置,为所述移动装置提供视觉引导,以通过所述移动装置将所述焊头移动到预定位置,所述焊头适于夹持所述导线,所述移动装置适于在所述视觉装置的引导下将所述焊头移动到与导线对准的夹持位置和将被夹持的导线移动到与所述焊垫对准的焊接位置。
3、根据本发明的一个实例性的实施例,所述移动装置包括:竖直移动模块,能够沿竖直方向移动;和水平移动模块,能够沿水平方向移动,所述焊头安装在所述竖直移动模块和所述水平移动模块中的一个上。
4、根据本发明的另一个实例性的实施例,所述竖直移动模块安装在所述水平移动模块上,以能够随所述水平移动模块一起沿所述水平方向移动;并且所述焊头安装在所述竖直移动模块上,以能够随所述竖直移动模块一起沿所述竖直方向移动。
5、根据本发明的另一个实例性的实施例,所述水平移动模块安装在所述竖直移动模块上,以能够随所述竖直移动模块一起沿所述竖直方向移动;并且所述焊头安装在所述水平移动模块上,以能够随所述水平移动模块一起沿所述水平方向移动。
6、根据本发明的另一个实例性的实施例,所述焊接系统还包括支架,所述支架具有沿所述水平方向和所述竖直方向延伸的支撑板,所述移动装置安装在所述支架的支撑板上。
7、根据本发明的另一个实例性的实施例,所述竖直移动模块包括:第一移动板;和第一驱动装置,用于驱动所述第一移动板沿所述竖直方向移动。所述水平移动模块包括:第二移动板;和第二驱动装置,用于驱动所述第二移动板沿所述水平方向移动。
8、根据本发明的另一个实例性的实施例,所述焊头安装在所述第一移动板上;所述第一移动板和所述第一驱动装置安装在所述第二移动板上;并且所述第二移动板和所述第二驱动装置安装在所述支撑板上。
9、根据本发明的另一个实例性的实施例,所述第一驱动装置包括:第一丝杠,转动地安装在所述第二移动板上;第一螺母,与所述第一丝杠螺纹连接并固定至所述第一移动板;和第一电机,固定在所述第二移动板上,用于驱动所述第一丝杠转动。
10、根据本发明的另一个实例性的实施例,所述第二驱动装置包括:第二丝杠,转动地安装在所述支撑板上;第二螺母,与所述第二丝杠螺纹连接并固定至所述第二移动板;和第二电机,固定在所述支撑板上,用于驱动所述第二丝杠转动。
11、根据本发明的另一个实例性的实施例,在所述第一移动板和所述第二移动板中的一个上设置有沿所述竖直方向延伸的第一滑轨,另一个上设置有适于与所述第一滑轨滑动配合的第一滑块;所述第一移动板通过所述第一滑轨和所述第一滑块被滑动地安装在所述第二移动板上。
12、根据本发明的另一个实例性的实施例,在所述支撑板和所述第二移动板中的一个上设置有沿所述水平方向延伸的第二滑轨,另一个上设置有适于与所述第二滑轨滑动配合的第二滑块;所述第二移动板通过所述第二滑轨和所述第二滑块被滑动地安装在所述支撑板上。
13、根据本发明的另一个实例性的实施例,所述视觉装置和所述焊头都安装在所述第一移动板上,使得所述视觉装置和所述焊头一起移动。
14、根据本发明的另一个实例性的实施例,所述焊头为激光焊头或烙铁头。
15、根据本发明的另一个实例性的实施例,所述移动装置为能够沿至少两个不同方向移动的平移机构、机器人或机械臂。
16、根据本发明的另一个实例性的实施例,在所述焊头的端部形成有v型槽,所述v型槽沿所述导线的轴向延伸预定长度,用于夹持不同直径的导线。
17、根据本发明的另一个方面,提供一种焊接方法,包括以下步骤:
18、s100:提供前述焊接系统;
19、s200:用于视觉装置识别待焊接的导线的位置;
20、s300:通过移动装置将焊头移动到与导线对准的夹持位置并夹持导线;
21、s400:用于视觉装置识别焊垫的位置;和
22、s500:通过移动装置将被夹持的导线移动到与焊垫对准的焊接位置并将导线焊接在焊垫上。
23、在根据本发明的前述各个实例性的实施例中,焊头能够夹持导线且能够在视觉引导下将夹持的导线精确地移动到与焊垫对准的位置,从而能够消除导线和焊垫之间的位置误差,提高了导线的焊接精度。
24、通过下文中参照附图对本发明所作的描述,本发明的其它目的和优点将显而易见,并可帮助对本发明有全面的理解。
技术特征:
1.一种焊接系统,用于将导线(1)焊接到焊垫(2)上,其特征在于,所述焊接系统包括:
2.根据权利要求1所述的焊接系统,其特征在于:
3.根据权利要求2所述的焊接系统,其特征在于:
4.根据权利要求2所述的焊接系统,其特征在于:
5.根据权利要求2所述的焊接系统,其特征在于:
6.根据权利要求5所述的焊接系统,其特征在于:
7.根据权利要求6所述的焊接系统,其特征在于:
8.根据权利要求7所述的焊接系统,其特征在于:
9.根据权利要求7所述的焊接系统,其特征在于:
10.根据权利要求7所述的焊接系统,其特征在于:
11.根据权利要求7所述的焊接系统,其特征在于:
12.根据权利要求7所述的焊接系统,其特征在于:
13.根据权利要求1所述的焊接系统,其特征在于:所述焊头(100)为激光焊头或烙铁头。
14.根据权利要求1所述的焊接系统,其特征在于:
15.根据权利要求1-14中任一项所述的焊接系统,其特征在于:
16.一种焊接方法,其特征在于,包括以下步骤:
技术总结
本发明公开一种焊接系统和焊接方法。所述焊接系统包括:移动装置,能够沿至少两个不同的方向移动;焊头,安装在所述移动装置上,以能够随所述移动装置一起移动;和视觉装置,为所述移动装置提供视觉引导,以通过所述移动装置将所述焊头移动到预定位置,所述焊头适于夹持所述导线,所述移动装置适于在所述视觉装置的引导下将所述焊头移动到与导线对准的夹持位置和将被夹持的导线移动到与所述焊垫对准的焊接位置。因此,本发明能够消除导线和焊垫之间的位置误差,提高了导线的焊接精度。
技术研发人员:陶宗杰,张丹丹,鲁异
受保护的技术使用者:泰科电子(上海)有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!