摇动电弧快速气电立焊方法及焊炬与应用
1.本发明属于焊接技术领域,具体涉及一种电弧摇动角度和电弧摇动频率可变的摇动电弧快速气电立焊方法及焊炬与应用。
背景技术:
2.气电立焊是一种大热输入、单道一次强迫成形的现场立向电弧焊工艺技术。施焊时,工件正面设有水冷铜成形滑块、背部设有水冷铜衬垫或陶瓷衬垫。与大坡口多层多道电弧焊相比,气电立焊可使焊接效率提高5~10倍以上,在船舶分段大合拢、大型油气储罐的现场立向焊接中,应用越来越多。厚钢板气电立焊时,需要使焊炬带动电弧沿板厚方向摆动,以防坡口根部和面侧出现未熔合;同时,往往需要采用v形大坡口,以通过提高焊接热输入,增大坡口侧壁熔深,但易导致出现焊接接头组织粗大、低温韧性裕量不足的问题。
3.中国专利号为201110376873.9、名称为“垂直气电立焊的焊枪摆动装置”的发明专利,通过电机及同步轮驱动丝杠带动焊枪,使焊丝端部的电弧在坡口左右侧板间作锯齿形摆动,改善了焊缝侧壁熔合;其缺点是:焊炬整体在坡口左右侧板间摆动时,电弧沿坡口宽度方向摆动幅值小,对坡口侧壁熔合改善效果不明显。中国专利号为202110409199.3、名称为“一种可变向摆动双丝气电立焊装置及新方法”的发明专利申请,通过连杆机构带动焊枪,使双丝气电立焊电弧沿板厚方向直线摆动的同时、可以在摆动平面内转动,促进了熔池流动,改善了坡口根部和前侧的焊缝成形;其缺点是:焊丝平行于坡口两侧壁摆动,电弧无法直接加热侧壁,对坡口侧壁熔合的改善效果不明显。此外,上述两种装置的共同缺点是:采用v形大坡口,焊丝填充量大、焊接速度相对较慢,焊接热输入大、接头低温韧性裕量不足。
4.中国专利号为201810318532.8、名称为“一种低热输入窄间隙垂直气电立焊方法”的发明专利,改用10~14mm的i形坡口,并通过齿轮弯曲焊丝,使焊丝端部的电弧在坡口两侧壁间来回横向摆动,降低了焊接热输入,改善了坡口侧壁熔合,提高了焊接效率(焊接速度)。但是,存在焊丝横向摆动不规则、摆动幅值小、摆动参数可控性差的问题,难以稳定获得足够的坡口侧壁熔深。
技术实现要素:
5.本发明的目的是为了克服现有技术存在的问题和不足,提出一种焊炬结构简单、焊接速度快、热输入低、侧壁熔合好、接头性能高、实用性强的可变参数摇动电弧快速气电立焊方法及焊炬,适用于单丝和双丝气电立焊。
6.为达到上述发明目的,本发明采用如下技术方案予以实现。
7.一种摇动电弧快速气电立焊方法,所用装置包括焊炬、电弧运动控制器(13)和焊炬摆动机构(14),其中焊炬包括大角度折弯导电杆机构1和电弧摇动机构2,其方法包括如下步骤:
8.①
通过所述焊炬的折弯角度为β的大角度折弯导电杆机构1,使焊丝3穿过电弧摇
动机构2后,从所述大角度折弯导电杆机构1下端的中心孔伸出;
9.②
通过所述电弧运动控制器13驱动焊炬摆动机构14,使所述焊炬带动焊丝3端部的电弧6在待焊坡口9内沿板厚方向前后直线摆动11;同时通过所述电弧运动控制器13驱动所述焊炬中的电弧摇动机构2,转动所述大角度折弯导电杆机构1,带动电弧6围绕焊炬中心线2a作左右圆弧形摇动10,相应地在i形窄间隙坡口901内作电弧摇动角度恒定和电弧摇动频率可变的等幅等频或等幅变频摇动,或在v形坡口902内作电弧摇动角度前侧大后侧小和电弧摇动频率可变的变幅等频或变幅变频摇动;
10.③
拖动机构带动所述焊炬及所述焊炬摆动机构14,可一同以较快焊接速度vw向上移动,使焊接熔池7在背部衬垫8和水冷铜滑块5的作用下强迫凝固成形,从而在i形窄间隙坡口901或v形坡口902下,实现电弧摇动角度和电弧摇动频率可变的摇动电弧快速气电立焊。
11.优选地,步骤
②
中,当所述焊炬带动电弧6摆动至所述i形窄间隙坡口901或v形坡口902的前侧或后侧停留期间,所述电弧运动控制器13通过电弧摇动机构2增大电弧摇动频率,实现所述等幅变频或变幅变频的圆弧形摇动。
12.优选地,所述大角度折弯导电杆机构1的折弯角度β为:15
°
≤β≤90
°
。
13.优选地,所述i形窄间隙坡口901的间隙为12~14mm、坡口单侧坡角为0~0.5
°
,等幅摇动时电弧摇动角度为4~15
°
可调;或者,所述v形坡口902的根部间隙为9~14mm、坡口单侧坡角为0.5~5
°
,变幅摇动时电弧摇动角度为5~25
°
可调;或者,所述v形坡口902的根部间隙为6~9mm、坡口单侧坡角为5~25
°
,变幅摇动时电弧摇动角度为5~38
°
可调。
14.优选地,所述电弧摇动频率可在2~30hz范围内可调。
15.优选地,步骤
②
中,当焊炬带动电弧6摆动至坡口前侧停留期间,所述电弧运动控制器13通过所述焊炬摆动机构14,使焊丝3与坡口中心线15的夹角θ等于θ1,其中90
°
<θ1≤110
°
;当焊炬带动电弧6在坡口内其他位置摆动时、以及摆动至坡口后侧停留期间,使焊丝3与坡口中心线15的夹角θ等于θ2,其中70
°
≤θ2≤90
°
16.为达到上述发明目的,本发明采用如下另一技术方案予以实现。
17.一种用于摇动电弧快速气电立焊方法的焊炬,包括大角度折弯导电杆机构1和电弧摇动机构2,其电弧摇动机构2包括空心轴电机201、或包括普通电机206及其传动副207;其中,所述大角度折弯导电杆机构1的折弯角度为β,15
°
≤β≤90
°
;所述大角度折弯导电杆机构1的上端通过连接机构202与所述空心轴电机201的前伸出轴固连、或与所述普通电机206的传动副207从动轮固连,并通过电缆连接头203与焊接电缆204相接;焊丝3穿过所述空心轴电机201的空心轴或所述传动副207的从动轮后、从所述大角度折弯导电杆机构1的中心孔中斜向伸出。
18.进一步,所述大角度折弯导电杆机构1包括大角度折弯导电杆1a和与之下端固连的直导电嘴1b,或包括直导电杆1c和与之下端固连的大角度折弯导电嘴1d。
19.优选地,所述大角度折弯导电杆1a或所述直导电杆1c的上端设有连接法兰,并通过所述连接法兰与所述空心轴电机201t形伸出轴的t形端固连。
20.优选地,所述大角度折弯导电杆1a或所述大角度折弯导电嘴1d的折弯角度β为30
°
或45
°
或60
°
。
21.进一步,所述大角度折弯导电杆机构1下端的折弯长度l=40~50mm,其中所述直
导电嘴1b长度l1=20~30mm;或者,所述大角度折弯导电嘴1d下端的折弯长度l2=20~45mm。
22.优选地,所述大角度折弯导电杆机构1下端的折弯长度l=45mm,其中包含所述直导电嘴1b长度l1;或者,所述大角度折弯导电嘴1d下端的折弯长度l2=25mm或30mm或35mm。
23.进一步,所述焊炬还包括用于检测电弧摇动频率及电弧摇动中点的检测机构205,所述检测机构205为旋转式光电编码器或光电开关装置,其套装在所述空心轴电机201的后伸出轴上;或者,在采用普通电机206时,使所述检测机构205套装在所述普通电机206的后伸出轴上、或套装在与所述传动副207从动轮固连的大角度折弯导电杆机构1上端的导电杆上。
24.优选地,所述光电开关装置包括光栅盘205a和光电开关205b,其光电开关光通路投影点o1在光栅盘205a平面内的圆弧运动半径为r,此时r为光栅盘工作半径,其中,d为光栅盘透光槽宽度,α为电弧摇动角度。
25.为达到上述发明目的,本发明采用如下另一技术方案予以实现。
26.一种用于摇动电弧快速气电立焊方法的焊炬的应用,其包括用于单丝和双丝气电立焊:用于单丝气电立焊,电弧6为单丝电弧,所述焊炬用作单丝电弧的焊炬;或者,用于双丝气电立焊,电弧6为前丝电弧,此时前丝电弧前后直线摆动并左右往复摇动,后丝电弧既不摇动也不摆动,所述焊炬用作前丝电弧的焊炬;或者,在双丝气电立焊应用时,电弧6分别用作前丝电弧和后丝电弧,此时前丝电弧前后直线摆动并左右往复摇动,后丝电弧前后同步直线摆动并左右往复摇动、或后丝电弧左右往复摇动但不摆动,所述焊炬分别用作前丝电弧和后丝电弧的焊炬。
27.与现有同类技术相比,本发明的主要优点和有益效果是:
28.1)通过转动大角度折弯导电杆机构,直接带动焊丝端部的电弧沿坡口宽度方向(横向)作圆弧形往复摇动,电弧横向运动幅值大、摇动参数可控性好、焊丝指向性强、电弧稳定性好,可显著提高坡口侧壁的电弧直接加热效果。从而,改善了气电立焊焊缝成形,提高了工程实用性。
29.2)采用大角度折弯导电杆机构,使得电弧摇动半径增大,电弧摇动角度明显减小,一方面可显著提高电弧摇动频率,增强电弧对坡口侧壁的热力作用;另一方面,可使得焊接馈电电缆与大角度折弯导电杆机构直接固连,在不使用碳刷馈电机构情况下,实现电缆无缠绕的焊接馈电,继而可不使用联轴器,使大角度折弯导电杆机构直接与电机伸出轴固连,极大地简化了焊炬结构,提高了焊炬工作可靠性。从而,进一步提高了实用性。
30.3)与传统v形大坡口的气电立焊相比,采用窄间隙或窄坡口工艺,可显著减小坡口截面积,减少焊丝填充量,提高焊接速度。从而,在明显降低焊接热输入、提高接头低温强韧性的同时,可实现快速气电立焊,并可降低对母材和焊材的大热输入焊接性要求、降低材料使用成本,促进气电立焊的推广应用。
31.4)在电弧摇动与摆动的协同控制下,通过对电弧摇动的变频控制,即在焊炬带动电弧摆动至坡口前侧和后侧停留期间,增大电弧摇动频率,可显著改善坡口后侧(根部)和前侧(面侧)的熔合,避免出现工程上常见的坡口根部和面侧熔合不良问题,提高了实用性。
32.5)在v形窄坡口或v形大坡口内,根据焊炬沿坡口深度方向前后摆动位置信息,通
过对电弧摇动的变幅控制,自动调节电弧摇动角度(摇动幅值),可适应v形坡口间隙在坡口深度方向上的变化。从而,在不增加焊接热输入情况下,可稳定形成足够的坡口侧壁熔深,提高了实用性。
附图说明
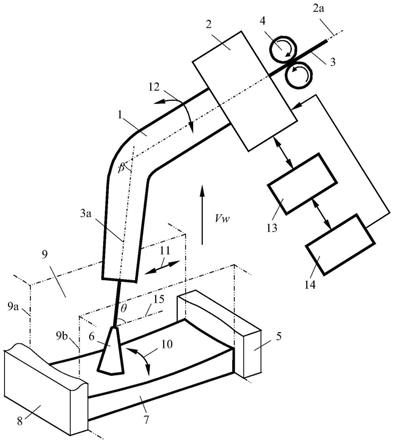
33.图1为本发明摇动电弧快速气电立焊方法及装置原理图。图中,1—大角度折弯导电杆机构;2—电弧摇动机构;2a—焊炬中心线;3—焊丝;3a—焊丝中心线;4—送丝机;5—水冷铜滑块;6—电弧;7—熔池;8—背部衬垫;9—待焊坡口;9a—坡口左侧壁;9b—坡口右侧壁;10—圆弧形摇动;11—直线摆动;12—导电杆机构来回转动;13—电弧运动控制器;14—焊炬摆动机构;15—坡口中心线;β—折弯角度;θ—焊丝与坡口中心线15的夹角;vw—焊接速度。
34.图2为在i形窄间隙坡口内电弧摇摆协同运动轨迹示意图。图中,901—i形窄间隙坡口;901a—第一坡口左侧壁;901b—第一坡口右侧壁;10a—第一电弧复合运动轨迹。
35.图3为变频摇动时电弧摇动频率与焊炬摆动位置关系的示意图。图中,f—电弧摇动频率。
36.图4为在v形坡口内电弧摇摆协同运动轨迹示意图。图中,902—v形坡口;902a—第二坡口左侧壁;902b—第二坡口右侧壁;10b—第二电弧复合运动轨迹。
37.图5为变幅摇动时电弧摇动角度与焊炬摆动位置关系的示意图。图中,α—电弧摇动角度。
38.图6为摇动电弧快速气电立焊焊炬实施例1的构成示意图。图中,201—空心轴电机;202—连接机构;203—电缆连接头;204—焊接馈电电缆;205—检测机构。
39.图7为摇动电弧快速气电立焊焊炬实施例2的构成示意图。图中,206—普通电机;207—传动副。
40.图8为大角度折弯导电杆机构实施例1的构成示意图。图中,1a—大角度折弯导电杆;1b—直导电嘴;l—大角度折弯导电杆机构1下端的折弯长度;l1—直导电嘴1b的长度。
41.图9为大角度折弯导电杆机构实施例2的构成示意图。图中,1c—直导电杆;1d—大角度折弯导电嘴;l2—大角度折弯导电嘴1d的折弯长度。
42.图10为光电开关检测原理图。图中,205a—光栅盘;205b—光电开关;15a—坡口中心线15的平行线;o—光栅盘中心点;o1—光电开关光通路投影点。
43.图11为光栅盘工作半径与透光槽宽度关系的示意图。图中,aa1—光电开关光通路投影点o1的圆弧运动弦长;d—光栅盘透光槽宽度;r—光栅盘工作半径。
具体实施方式
44.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本发明的部分实施例,而不是全部的实施例。
45.本发明的摇动电弧快速气电立焊方法及装置原理,以单丝气电立焊为例,如图1所示。其装置包括:摇动电弧快速气电立焊焊炬、电弧运动控制器13、焊缝强迫成形装置(包括背部衬垫8和水冷铜滑块5)、焊炬摆动机构14、送丝机4、以及所述焊炬、水冷铜滑块5和焊炬摆动机构14的共同拖动机构(未画出)。其中,所述焊炬包括大角度折弯导电杆机构1、电弧
摇动机构2;大角度折弯导电杆机构1的上端与电弧摇动机构2相连接、下端伸入由坡口左侧壁9a和坡口右侧壁9b围成的待焊坡口9中;待焊坡口9包括i形窄间隙坡口901(见图2)和v形坡口902(见图4),其v形坡口又包括v形窄坡口和v形大坡口;水冷铜滑块5中设有焊接保护气通入孔,将焊接保护气送入坡口内焊接区域;送丝机4送出的焊丝3,依次穿过所述焊炬的电弧摇动机构2、大角度折弯导电杆机构1后,从大角度折弯导电杆机构1下端的中心孔伸出,并与坡口中心线15成夹角θ,其夹角θ为焊炬中心线2a、焊丝中心线3a以及坡口中心线15位于同一平面时,所述焊丝3与坡口中心线15之间的夹角,可根据焊炬摆动位置变化进行实时调整。
46.焊前,通过电弧运动控制器13,可设置并显示电弧摇动参数(电弧摇动频率、电弧摇动角度、电弧摇动至坡口两侧停留时间),可设置并显示焊炬摆动参数(焊炬摆动频率、焊炬摆动至坡口前后两侧停留时间),还可与检测机构配合,实现焊前自动寻找电弧摇动中点定位;焊接过程中,通过电弧运动控制器13,控制电弧摇动机构2和焊炬摆动机构14,同时还可与检测机构配合,实时检测并显示电弧摇动频率、焊炬(电弧)摆动频率。其中,电弧摇动频率在0~30hz、电弧摇动角度在0~180
°
、电弧摇动至坡口两侧停留时间在0~500ms范围内可调;焊炬摆动频率在0~1.0hz、焊炬摆动至坡口前后两侧停留时间分别在0~2s可调。
47.焊接时,在待焊坡口9内引燃焊接电弧6,此时焊接电流通过电弧摇动机构2或大角度折弯导电杆机构1,流入电弧6;然后,电弧运动控制器13发出控制信号、驱动电弧摇动机构2和焊炬摆动机构14,通过电弧摇动机构2转动大角度折弯导电杆机构1,带动焊丝3端部的电弧6在待焊坡口9的坡口左侧壁9a和坡口右侧壁9b间、沿坡口宽度方向作左右圆弧形摇动10,并通过焊炬摆动机构14带动所述焊炬和电弧6一起、沿坡口深度方向作前后直线摆动11,使电弧6作左右往复圆弧形摇动10与前后来回直线摆动11相协同的运动;同时,拖动机构带动所述焊炬、水冷铜滑块5及焊炬摆动机构14一起,以焊接速度vw向上移动,并在背部衬垫8和前侧水冷铜滑块5的共同作用下,使焊接熔池7凝固成焊缝。相应地,针对v形大坡口,可实现摇动角度和摇动频率可变的摇动电弧气电立焊;针对i形窄间隙坡口或v形窄坡口,因待焊坡口9截面积变小,可提高焊接速度,实现摇动角度和摇动频率可变的摇动电弧快速气电立焊。
48.本发明的摇动电弧快速气电立焊方法,一方面,可通过采用i形窄间隙坡口或v形窄坡口,减小坡口截面,从而在减少焊丝填充量的同时,可显著提高焊接速度、降低焊接热输入、提升接头强韧性,在较快焊接速度(相对于v形大坡口工艺)下,实现低成本高性能的快速气电立焊;另一方面,通过电弧6在待焊坡口9左右两侧壁间的往复式圆弧形摇动10,促进坡口侧壁熔合,可在较低热输入下获得焊缝成形良好的气电立焊接头,从而促进窄间隙或窄坡口工艺的应用,同时还可进一步提升接头强韧性。因此,本发明气电立焊方法,可协同提升气电立焊性能与效率(焊接速度),降低对母材和焊材的大热输入焊接性要求,实现低成本高性能的快速气电立焊。
49.电弧摇动与摆动的协同控制实施例:电弧作摇动与摆动协同的运动时,电弧6一方面在待焊坡口9内作左右往复式圆弧形摇动10,同时所述焊炬还要带动电弧6作前后来回直线摆动11。其中,焊炬摆动位置包括:由前至后或由后至前的摆动期,以及在坡口后侧的后侧停留期、在坡口前侧的前侧停留期,如图3所示;电弧协同运动模式包括:针对i形窄间隙坡口,包括“等幅等频摇动+直线摆动”和“等幅变频摇动+直线摆动”两种模式;针对v形坡
口,包括“变幅变频摇动+直线摆动”和“变幅等频摇动+直线摆动”两种模式。
[0050]“等幅等频摇动+直线摆动”模式实施例:如图2所示,在i形窄间隙坡口901内,焊接电弧6一方面沿坡口宽度方向作摇动角度恒定的等辐圆弧形摇动10,同时所述焊炬带动电弧6沿坡口深度方向作直线摆动11,并在电弧摇动至接近第一坡口左侧壁901a和第一坡口右侧壁901b处、以及摆动至坡口后侧(背部衬垫8侧)和坡口前侧(水冷铜滑块5侧)位置处时,分别短暂停留,以在电弧热力作用下形成足够的坡口侧壁熔深,相应地在i形坡口901内形成第一电弧复合运动轨迹10a。其中,在所述焊炬带动电弧6作前后直线摆动11的整个过程中,当电弧摇动频率始终保持不变(即等频)时,即可实现“等幅等频摇动+直线摆动”的电弧复合运动控制。
[0051]“等幅变频摇动+直线摆动”模式实施例:如图2所示,在i形坡口901内,所述焊炬带动电弧6作前后直线摆动11的过程中,电弧摇动角度α不变(即等幅),而电弧摇动频率f则在焊炬摆动至坡口前后两侧停留期间增大(即变频),如图3所示,从而在i形坡口内实现“等幅变频摇动+直线摆动”的电弧复合运动控制。也就是说,在所述焊炬带动电弧摆动至坡口前后两侧的停摆期间,电弧运动控制器13通过电弧摇动机构2,使电弧6加快摇动,以增大坡口两侧壁的电弧热输入,提高电弧热在坡口两侧壁上的分布均匀性,使坡口后侧(根部)和坡口前侧(面侧)充分熔合,避免出现工程上常见的坡口根部和面侧熔合不良的问题,提高了实用性。
[0052]“变幅变频摇动+直线摆动”模式实施例:如图4所示,在v形坡口902内,所述焊炬带动电弧6作前后直线摆动11的过程中,根据焊炬前后摆动位置信息,电弧运动控制器13通过电弧摇动机构2,使电弧6在第二坡口左侧壁902a和第二坡口右侧壁902b之间作左右变幅摇动,即当焊炬靠近坡口前侧时电弧摇动角度α(摇动幅值)变大,当焊炬靠近坡口后侧时α变小,如图5所示,相应地在v形坡口902内形成第二电弧复合运动轨迹10b;同时,在焊炬前后摆动的坡口前侧停留和坡口后侧停留期间,使电弧摇动频率f增大,如图3所示。从而,在v形坡口内实现“变幅变频摇动+直线摆动”的电弧复合运动控制。
[0053]“变幅等频摇动+直线摆动”模式实施例:如图4和图5所示,在“变幅变频摇动+直线摆动”模式实施例的变幅摇动基础上,当所述焊炬带动电弧6在v形坡口902内、作前后直线摆动11的过程中,使电弧摇动频率始终保持不变(等频),从而在v形坡口内实现“变幅等频摇动+直线摆动”的电弧复合运动控制。
[0054]
焊丝与坡口中心线夹角θ实时调整的实施例:为了提高电弧6在待焊坡口9内的可达性,进一步改善坡口后侧(根部)和坡口前侧(面侧)的熔合,一方面,通过焊前设置,使所述焊炬在由前至后或由后至前的摆动期、以及在坡口后侧的后侧停留期,使焊丝3与坡口中心线15的夹角θ等于θ2,并使θ2≤90
°
,优选地70
°
≤θ2≤90
°
,从而当所述焊炬带动电弧6摆动至接近坡口后侧(根部)时,可加强电弧9对坡口后侧的直接加热作用,以进一步改善坡口根部的熔合;另一方面,当所述焊炬带动电弧6摆动至坡口前侧位置停留时,电弧运动控制器13通过焊炬摆动机构14,使所述焊炬在其摆动平面内转动一定角度,从而使焊丝3与坡口中心线15的夹角θ等于θ1,并使θ1》90
°
,优选地90
°
<θ1≤110
°
,此时电弧9更接近坡口前侧,可加强电弧9对坡口前侧的直接加热作用,以进一步改善坡口面侧的熔合。其中,根据焊接电弧电流和电弧电压大小、以及焊炬前后摆动幅值大小,在上述优选参数范围内,选定θ1和θ2的值。
[0055]
摇动电弧快速气电立焊焊炬实施例1:如图6所示,其焊炬包括:大角度折弯导电杆机构1、电弧摇动机构2、连接机构202、电缆连接头203、焊接馈电电缆204,或者还包括用于检测电弧摇动频率及电弧摇动中点的检测机构205。其中,电弧摇动机构2包括空心轴电机201,其空心轴电机201为带有空心轴的直流电机、或步进电机、或伺服电机;当大角度折弯导电杆机构1的上端为直型端时、连接机构202为螺母型连接件,当大角度折弯导电杆机构1的上端设有连接法兰时、连接机构202为所述连接法兰与空心轴电机201前伸出轴t形端构成的连接综合体;通过所述螺母型连接件,使大角度折弯导电杆机构1的上端与空心轴电机201的前伸出轴固连,或通过所述连接综合体,使大角度折弯导电杆机构1上端的连接法兰与所述空心轴电机201前伸出轴的t形端固连;焊接馈电电缆204的一端与焊接电源相接,另一端通过电缆连接头203与所述大角度折弯导电杆机构1相连、或与连接机构202相连。
[0056]
焊丝3从送丝机4送出后,依次穿过空心轴电机201的空心轴、以及大角度折弯导电杆机构1的中心孔后斜向伸出,并使斜向伸出时的焊丝中心线3a与焊炬中心线2a成夹角β,其夹角β即为大角度折弯导电杆机构1的折弯角度、可在15
°
~90
°
内取值,其中为便于大角度折弯导电杆机构1的加工制造,所述夹角β优选为30
°
或45
°
或60
°
。空心轴电机201通过连接机构202、驱动大角度折弯导电杆机构1,使该导电杆机构围绕焊炬中心线2a作来回转动12,带动焊丝3端部的电弧6作圆弧形摇动10,在气电立焊下实现电弧摇动。
[0057]
此外,当空心轴电机201为步进电机或直流电机时,所述焊炬还包括用于检测电弧摇动频率及电弧摇动中点的检测机构205,此时所述检测机构205为旋转式光电编码器或光电开关装置,其套装在空心轴电机205的后端伸出轴上;当空心轴电机201为伺服电机时,所述伺服电机的内置光电编码器,用于检测电弧摇动频率及电弧摇动中点。相应地,气电立焊装置(见图1)中的电弧运动控制器13,根据所述检测机构205或所述伺服电机内置光电编码器发出的旋转位置信号,焊前检测并自动寻找电弧摇动中点定位,焊接过程中实时检测并显示电弧摇动频率。
[0058]
本发明的摇动电弧快速气电立焊焊炬,因采用了大角度折弯导电杆机构1,使得电弧摇动半径增大,电弧摇动角度α明显减小,一方面可显著提高电弧摇动频率,增强电弧对坡口侧壁的热力作用;另一方面,可使得焊接馈电电缆204可与大角度折弯导电杆机构1直接固连,在不使用碳刷馈电机构情况下,实现电缆无缠绕的焊接馈电。同时,因为不使用碳刷馈电机构,可在不使用联轴器情况下,使得大角度折弯导电杆机构直接与电机伸出轴固连。从而,极大地简化了焊炬结构,提升了焊炬工作可靠性,提高了工程实用性。
[0059]
摇动电弧快速气电立焊焊炬实施例2:如图7所示,其焊炬包括:大角度折弯导电杆机构1、电弧摇动机构2、电缆连接头203、焊接馈电电缆204,或者还包括用于检测电弧摇动频率及电弧摇动中点的检测机构205。其中,电弧摇动机构2包括市售的普通电机206、传动副207,其普通电机206为直流电机、或步进电机、或伺服电机,其传动副207为皮带轮传动副或齿轮传动副。所述传动副207的主动轮套装在所述普通电机206的前端伸出轴上,从动轮套装在所述大角度折弯导电杆机构1上端的导电杆上;焊接馈电电缆204的一端与焊接电源相接,另一端通过电缆连接头203与所述大角度折弯导电杆机构1上端的导电杆相连,实现电缆无缠绕的焊接馈电。
[0060]
焊丝3从送丝机4送出后,穿过所述大角度折弯导电杆机构1的中心孔后斜向伸出,并使斜向伸出时的焊丝中心线3a与焊炬中心线2a成夹角β,其夹角β即为大角度折弯导电杆
在光栅盘205a内的圆弧运动半径为r,r=oo1=oa=oa1,此时r为光栅盘工作半径,并且满足下式条件:
[0066][0067]
摇动电弧快速气电立焊方法及焊炬的应用实施例:用于单丝气电立焊,此时所述电弧6为单丝电弧,所述焊炬用作单丝电弧的焊炬;或者,用于双丝气电立焊,所述电弧6为前丝电弧,此时前丝电弧前后直线摆动并左右往复摇动,后丝电弧既不摇动也不摆动,所述焊炬用作前丝电弧的焊炬;或者,用于双丝气电立焊,所述电弧6分别用作前丝电弧和后丝电弧,此时前丝电弧前后直线摆动并左右往复摇动,后丝电弧前后同步直线摆动并左右往复摇动、或后丝电弧左右往复摇动但不摆动,所述焊炬分别用作前丝电弧和后丝电弧的焊炬。
[0068]
摇动电弧快速气电立焊推荐参数:根据不同施焊情形,焊前需设定焊接能量参数、电弧摇动参数、焊炬摆动参数;电弧变幅摇动时,焊接过程中还需实时调节电弧摇动角度。具体设定或调节方法实施例如下:
[0069]
①
采用i形窄间隙坡口进行单丝快速气电立焊时:工件板厚范围为15~45mm,坡口间隙范围为12~14mm,坡口单侧坡角为0~0.5
°
;焊丝3与坡口中心线15夹角θ可在70~110
°
范围内选择;采用1.6mm药芯焊丝,焊接电流为300~450a、电弧电压为30~45v;电弧等幅摇动时,电弧摇动频率f为2~30hz、电弧摇动至坡口两侧停留时间为0~500ms可调,并且针对不同坡口根部间隙、以及导电杆机构折弯长度,电弧摇动角度α可在4~15
°
内选择。电弧等幅摇动时,电弧摇动角度实施例如下:
[0070]
电弧等幅摇动角度实施例1和实施例2:坡口间隙为12mm,大角度折弯导电杆机构1的折弯角度β为45
°
,电弧作等幅摇动;分别针对20mm和45mm的大角度折弯导电杆机构1下端折弯长度,当电弧中心轴线至坡口侧壁最近距离(即工艺间隙)在2.5~3.5mm之间变化时,电弧摇动角度α分别可在6.6~11.4
°
和4.4~7.6
°
范围内选择。
[0071]
电弧等幅摇动角度实施例3和实施例4:坡口间隙为14mm,大角度折弯导电杆机构1的折弯角度β为45
°
,电弧作等幅摇动;分别针对20mm和45mm的大角度折弯导电杆机构1下端折弯长度,当电弧中心轴线至坡口侧壁最近距离(即工艺间隙)在2.5~3.5mm之间变化时,电弧摇动角度α分别可在9.3~14.7
°
和6.2~9.8
°
范围内选择。
[0072]
②
采用v形窄坡口进行单丝快速气电立焊时:工件板厚范围为15~45mm,坡口根部间隙为9~14mm,坡口单侧坡角为0.5~5
°
;焊丝3与坡口中心线15夹角θ可在70~110
°
范围内选择;采用1.6mm药芯焊丝,焊接电流为300~450a,电弧电压为30~45v;电弧变幅摇动时,摇动频率为2~30hz、电弧摇动至坡口两侧停留时间为0~500ms可调,并且针对不同工件板厚、导电杆机构折弯长度、以及坡口参数的组合,电弧摇动角度可在5~25
°
范围内调节。相应地,电弧变幅摇动角度的实施例如下:
[0073]
电弧变幅摇动角度实施例1~实施例4:工件板厚为15mm,焊炬带动电弧在坡口内前后摆动幅值为5mm,大角度折弯导电杆机构1的折弯角度β=45
°
、下端折弯长度l=20mm。
[0074]
当坡口单侧坡角为0.5
°
时:在坡口根部间隙分别为12mm和14mm情形下,电弧变幅摇动时电弧摇动角度α的自动调节范围分别为11.5~11.7
°
和14.7~14.8
°
。
[0075]
当坡口单侧坡角为5
°
时:在坡口根部间隙分别为9mm和13mm情形下,电弧变幅摇动时电弧摇动角度α的自动调节范围分别为7.9~9.3
°
和14.4~15.8
°
。
[0076]
电弧变幅摇动角度实施例5~实施例8:工件板厚为15mm,焊炬带动电弧在坡口内前后摆动幅值为5mm,大角度折弯导电杆机构1的折弯角度β=45
°
、下端折弯长度l=45mm。
[0077]
当坡口单侧坡角为0.5
°
时:在坡口根部间隙分别为12mm和14mm情形下,电弧变幅摇动时电弧摇动角度α的自动调节范围分别为7.7~7.8
°
和9.8~9.9
°
。
[0078]
当坡口单侧坡角为5
°
时:在坡口根部间隙分别为9mm和13mm情形下,电弧变幅摇动时电弧摇动角度α的自动调节范围分别为5.3~6.2
°
和9.6~10.5
°
。
[0079]
电弧变幅摇动角度实施例9~实施例12:工件板厚为45mm,焊炬带动电弧在坡口内前后摆动幅值为35mm,大角度折弯导电杆机构1的折弯角度β=45
°
、下端折弯长度l=20mm。
[0080]
当坡口单侧坡角为0.5
°
时:在坡口根部间隙分别为12mm和14mm情形下,电弧变幅摇动时电弧摇动角度α的自动调节范围分别为11.5~12.5
°
和14.7~15.7
°
。
[0081]
当坡口单侧坡角为5
°
时:在坡口根部间隙分别为9mm和11mm情形下,电弧变幅摇动时电弧摇动角度α的自动调节范围分别为7.9~17.8
°
和14.4~24.2
°
。
[0082]
电弧变幅摇动角度实施例13~实施例16:工件板厚为45mm,焊炬带动电弧在坡口内前后摆动幅值为35mm,大角度折弯导电杆机构1的折弯角度β=45
°
、下端折弯长度l=45mm。
[0083]
当坡口单侧坡角为0.5
°
时:在坡口根部间隙分别为12mm和14mm情形下,电弧变幅摇动时电弧摇动角度α的自动调节范围分别为7.7~8.3
°
和9.8~10.5
°
。
[0084]
当坡口单侧坡角为5
°
时:在坡口根部间隙分别为9mm和11mm情形下,电弧变幅摇动时电弧摇动角度α的自动调节范围分别为5.3~11.9
°
和9.6~16.2
°
。
[0085]
③
采用v形大坡口进行单丝快速气电立焊时:工件板厚为15~30mm时,坡口根部间隙为6~8mm,坡口单侧坡角为15~25
°
;工件板厚为30~45mm时,坡口根部间隙为7~9mm,坡口单侧坡角为5~15
°
。焊丝3与坡口中心线15夹角θ可在70~110
°
范围内选择;采用1.6mm药芯焊丝,焊接电流为300~450a,电弧电压为30~45v;电弧变幅摇动时,摇动频率为2~30hz、电弧摇动至坡口两侧停留时间为0~500ms可调,并且电弧摇动角度可在5~38
°
范围内调节。相应地,电弧变幅摇动角度的实施例如下:
[0086]
电弧变幅摇动角度实施例17~实施例20:工件板厚为15mm,焊炬带动电弧在坡口内前后摆动幅值为5mm,大角度折弯导电杆机构1的折弯角度β=45
°
。
[0087]
当坡口单侧坡角为15
°
、坡口根部间隙为8mm时:在大角度折弯导电杆机构1的下端折弯长度l分别为20mm和45mm的情形下,电弧变幅摇动时电弧摇动角度α的自动调节范围分别为9.2~13.5
°
和6.1~9.0
°
。
[0088]
当坡口单侧坡角为25
°
、坡口根部间隙为6mm时:在大角度折弯导电杆机构1的下端折弯长度l分别为20mm和45mm的情形下,电弧变幅摇动时电弧摇动角度α的自动调节范围分别为9.2~16.7
°
和7.5~13.9
°
。
[0089]
电弧变幅摇动角度实施例21~实施例24:工件板厚为30mm,焊炬带动电弧在坡口内前后摆动幅值为20mm,大角度折弯导电杆机构1的折弯角度β=45
°
。
[0090]
当坡口单侧坡角为15
°
、坡口根部间隙为8mm时:在大角度折弯导电杆机构1的下端折弯长度l分别为20mm和45mm的情形下,电弧变幅摇动时电弧摇动角度α的自动调节范围分
别为9.2~26.4
°
和6.1~17.7
°
。
[0091]
当坡口单侧坡角为15
°
、坡口根部间隙为7mm时:在大角度折弯导电杆机构1的下端折弯长度l分别为20mm和45mm的情形下,电弧变幅摇动时电弧摇动角度α的自动调节范围分别为7.6~24.8
°
和5.1~16.7
°
。
[0092]
电弧变幅摇动角度实施例25~实施例28:工件板厚为45mm,焊炬带动电弧在坡口内前后摆动幅值为35mm,大角度折弯导电杆机构1的折弯角度β=45
°
。
[0093]
当坡口单侧坡角为5
°
、坡口根部间隙为9mm时:在大角度折弯导电杆机构1的下端折弯长度l分别为20mm和45mm的情形下,电弧变幅摇动时电弧摇动角度α的自动调节范围分别为7.8~17.8
°
和5.3~11.9
°
。
[0094]
当坡口单侧坡角为15
°
、坡口根部间隙为7mm时:电弧变幅摇动时电弧摇动角度α的自动调节范围分别为7.6~37.4
°
和5.1~25.2
°
。
[0095]
总结起来,上述所述摇动电弧快速气电立焊方法,包括如下步骤:
[0096]
①
通过所述焊炬的折弯角度为β的大角度折弯导电杆机构1,使焊丝3穿过电弧摇动机构2后,从所述大角度折弯导电杆机构1下端的中心孔伸出,其中15
°
≤β≤90
°
;
[0097]
②
通过所述电弧运动控制器13驱动焊炬摆动机构14,使所述焊炬带动焊丝3端部的电弧6在待焊坡口9内沿板厚方向前后直线摆动11;同时通过所述电弧运动控制器13驱动所述焊炬中的电弧摇动机构2,转动所述大角度折弯导电杆机构1,带动电弧6围绕焊炬中心线2a作左右圆弧形摇动10,相应地在i形窄间隙坡口901内作电弧摇动角度恒定和电弧摇动频率可变的等幅等频或等幅变频摇动,或在v形坡口902内作电弧摇动角度前侧大后侧小和电弧摇动频率可变的变幅等频或变幅变频摇动;
[0098]
③
拖动机构带动所述焊炬及所述焊炬摆动机构14,可一同以较快焊接速度vw向上移动,使焊接熔池7在背部衬垫8和水冷铜滑块5的作用下强迫凝固成形,从而在i形窄间隙坡口901或v形坡口902下,实现电弧摇动角度和电弧摇动频率可变的摇动电弧快速气电立焊。
[0099]
在上述所述步骤
②
中,当所述焊炬带动电弧6摆动至所述i形窄间隙坡口901或v形坡口902的前侧或后侧停留期间,所述电弧运动控制器13通过电弧摇动机构2增大电弧摇动频率,实现所述等幅变频或变幅变频的圆弧形摇动。
[0100]
上述所述i形窄间隙坡口901的间隙为12~14mm、坡口单侧坡角为0~0.5
°
,等幅摇动时电弧摇动角度为4~15
°
可调;或者,所述v形坡口902的根部间隙为9~14mm、坡口单侧坡角为0.5~5
°
,变幅摇动时电弧摇动角度为5~25
°
可调;或者,所述v形坡口902的根部间隙为6~9mm、坡口单侧坡角为5~25
°
,变幅摇动时电弧摇动角度为5~38
°
可调。优选地,所述电弧摇动频率可在2~30hz范围内可调。
[0101]
在上述所述步骤
②
中,当焊炬带动电弧6摆动至坡口前侧停留期间,所述电弧运动控制器13通过所述焊炬摆动机构14,使焊丝3与坡口中心线15的夹角θ等于θ1,其中θ1》90
°
;当焊炬带动电弧6在坡口内其他位置摆动时、以及摆动至坡口后侧停留期间,使焊丝3与坡口中心线15的夹角θ等于θ2,其中θ2≤90
°
。优选地,90
°
<θ1≤110
°
;70
°
≤θ2≤90
°
。
[0102]
另外,本发明的具体实现方法和途径很多,以上所述仅是本发明的优选实施方式。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。本实施例中未明确的各
组成部分均可用现有技术加以实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1