双机器人排版机的制作方法
1.本发明涉及排版机领域,尤其涉及一种双机器人排版机。
背景技术:
2.在太阳能板制造行业,机器人排版机用于将电磁串排在太阳能玻璃板上,以便于后续固定安装作业。
3.现有机器人排版机在使用过程中存在以下问题:(1)目前机器人排版机大多采用一个机械手进行工作的形式,工作效率较低。
4.(2)双机器人排版机结构不够紧凑,导致外形较大,占地面积增加,并且串输线和视觉系统未完全分开,使工作的过程中各部分产生的振动相互影响,降低了排版精度。
技术实现要素:
5.本发明提出的一种双机器人排版机,解决了目前机器人排版机大多采用一个机械手进行工作的形式,工作效率较低,且双机器人排版机结构不够紧凑,导致外形较大,占地面积增加,并且串输线和视觉系统未完全分开,使工作的过程中各部分产生的振动相互影响,降低了排版精度的问题。
6.为了实现上述目的,本发明采用了如下技术方案:一种双机器人排版机,包括排版机机架,所述排版机机架的下方设有输送线机架,所述输送线机架上设有输送线,所述输送线上的前端位置设有排版前规正机构,所述输送线的尾端位置设有排版位规正机构,所述排版机机架上设有位于输送线尾端的阻挡机构,所述输送线的两侧均设有夹紧气缸规正组件,所述输送线上方设有固定在排版机机架上的串输线,所述串输线的上方设有视觉组件,所述排版机机架的两侧均设有机器人机架,所述机器人机架上安装有机器人,所述机器人的手部均安装有抓具组件,所述排版机机架的一侧设有电柜。
7.优选的,所述排版前规正机构包括固定在输送线下方的横架,所述横架的两端均固定有安装座一,所述安装座一上安装有气缸一,所述气缸一的活塞杆连接有侧定位板,两个所述侧定位板位于输送线的两侧。
8.采用上述方案,当输送线输送太阳能玻璃板时,通过气缸一驱动两个侧定位板运动,使两个侧定位板对太阳能玻璃进行预规正,防止玻璃在输送过程中发生跑偏现象,保证玻璃准确进入指定工位。
9.优选的,所述排版位规正机构包括固定在排版机机架上的安装架,所述安装架的两侧均固定有驱动电机,所述驱动电机的输出轴均设有皮带轮,两个所述皮带轮之间套设有皮带,所述安装架的两端均设有固定在皮带上的安装板,所述安装板的顶部两侧均固定有定位柱。
10.采用上述方案,当玻璃输送至指定工位就位后,驱动电机驱动皮带轮带动皮带缓慢转动,两侧的两个安装板随皮带运动并相互靠近,直至将玻璃左右夹持稳定,实现对玻璃板的左右规正。
11.优选的,所述阻挡机构包括固定在排版机机架上并位于输送线尾端位置的安装座二,所述安装座二上固定安装有气缸二,所述气缸二的活塞杆端安装有挡头。
12.采用上述方案,当输送线输送玻璃时,气缸二驱动挡头伸出,当输送线将玻璃输送至一定位置后通过挡头对玻璃进行阻挡,使玻璃能够停在指定位置,防止玻璃发生移位。
13.优选的,所述夹紧气缸规正组件包括固定在排版机机架两侧的两个安装座三,所述安装座三上固定安装有气缸三所述气缸三的活塞杆连接有定位头。
14.采用上述方案,当玻璃输送至指定工位后,夹紧气缸规正组件的气缸三通过驱动两个定位头对玻璃的前后进行夹持,配合排版位规正机构,能够对玻璃全方位规正并固定,保证玻璃位于指定位置。
15.优选的,所述视觉组件包括位于输送线上方的摄像架,所述摄像架上安装有均匀分布的摄像头。
16.采用上述方案,通过设置的多个摄像头对电磁串进行拍照并传输信号至机器人,使机器人能够将电磁串放置在玻璃板上的指定位置,保证排版精度。
17.优选的,所述抓具组件包括固定在机器人手部的夹具架,所述夹具架上设有均匀分布的气动夹头。
18.采用上述方案,利用夹具架上的多个气动夹头对多个电磁串进行同时夹取,使机器人能够将电磁串放置在玻璃上。
19.本发明的有益效果:双机器人排版机相对于单机器人排版机而言采用的是两个机械手同时进行工作的形式,很大程度上增加了工作效率;双机器人排版机将机械手,串输线和视觉系统完全分开,使工作的过程中各部分产生的振动互不影响,减小了因振动给视觉系统带来的误差,提高了排版的精度。
附图说明
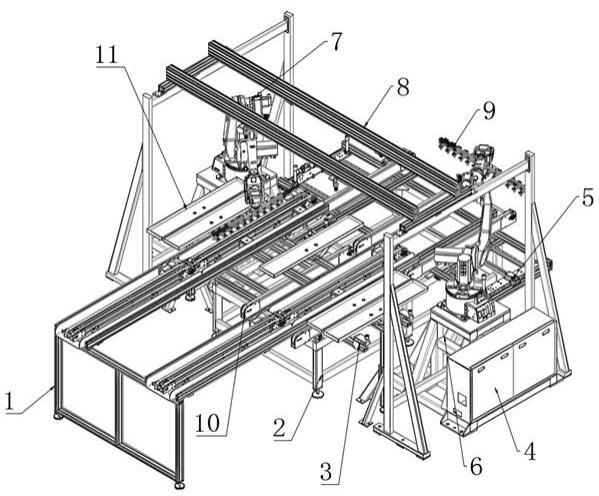
20.图1为本发明的整体结构示意图;图2为本发明输送线机架的结构示意图;图3为本发明机器人机架的结构示意图;图4为本发明排版位归正机构的结构示意图;图5为本发明输送线的结构示意图;图6为本发明排版前归正机构的结构示意图;图7为本发明夹紧气缸归正机构的结构示意图;图8为本发明阻挡机构的结构示意图;图9为本发明串输线的结构示意图;图10为本发明视觉组件的结构示意图;图11为本发明抓具组件的结构示意图;图12为本发明机械手的结构示意图。
21.图中:1、排版机机架;2、输送线机架;3、排版前规正机构;31、横架;32、安装座一;33、气缸一;34、侧定位板;4、电柜;5、排版位规正机构;51、安装架;52、驱动电机;53、皮带轮;54、皮带;55、安装板;56、定位柱;6、机器人机架;7、机器人;8、视觉组件;81、摄像架;82、
摄像头;9、抓具组件;91、夹具架;92、气动夹头;10、输送线;11、串输线;12、夹紧气缸规正组件;121、安装座三;122、气缸三;123、定位头;13、阻挡机构;131、安装座二;132、气缸二;133、挡头。
具体实施方式实施例
22.参照图1-12,本发明提供一种双机器人排版机,包括排版机机架1,排版机机架1的下方设有输送线机架2,输送线机架2上设有输送线10,输送线10上的前端位置设有排版前规正机构3,输送线10的尾端位置设有排版位规正机构5,排版机机架1上设有位于输送线10尾端的阻挡机构13,输送线10的两侧均设有夹紧气缸规正组件12,输送线10上方设有固定在排版机机架1上的串输线11,串输线11的上方设有视觉组件8,排版机机架1的两侧均设有机器人机架6,机器人机架6上安装有机器人7,机器人7的手部均安装有抓具组件9,排版机机架1的一侧设有电柜4。
23.排版前规正机构3包括固定在输送线10下方的横架31,横架31的两端均固定有安装座一32,安装座一32上安装有气缸一33,气缸一33的活塞杆连接有侧定位板34,两个侧定位板34位于输送线10的两侧。当输送线10输送太阳能玻璃板时,通过气缸一33驱动两个侧定位板34运动,使两个侧定位板34对太阳能玻璃进行预规正,防止玻璃在输送过程中发生跑偏现象,保证玻璃准确进入指定工位。
24.排版位规正机构5包括固定在排版机机架1上的安装架51,安装架51的两侧均固定有驱动电机52,驱动电机52的输出轴均设有皮带轮53,两个皮带轮53之间套设有皮带54,安装架51的两端均设有固定在皮带54上的安装板55,安装板55的顶部两侧均固定有定位柱56。当玻璃输送至指定工位就位后,驱动电机52驱动皮带轮53带动皮带54缓慢转动,两侧的两个安装板55随皮带运动并相互靠近,直至将玻璃左右夹持稳定,实现对玻璃板的左右规正。
25.阻挡机构13包括固定在排版机机架1上并位于输送线10尾端位置的安装座二131,安装座二131上固定安装有气缸二132,气缸二132的活塞杆端安装有挡头133。当输送线10输送玻璃时,气缸二132驱动挡头133伸出,当输送线10将玻璃输送至一定位置后通过挡头133对玻璃进行阻挡,使玻璃能够停在指定位置,防止玻璃发生移位。
26.夹紧气缸规正组件12包括固定在排版机机架1两侧的两个安装座三121,安装座三121上固定安装有气缸三122气缸三122的活塞杆连接有定位头123。当玻璃输送至指定工位后,夹紧气缸规正组件12的气缸三122通过驱动两个定位头123对玻璃的前后进行夹持,配合排版位规正机构5,能够对玻璃全方位规正并固定,保证玻璃位于指定位置。
27.视觉组件8包括位于输送线10上方的摄像架81,摄像架81上安装有均匀分布的摄像头82。通过设置的多个摄像头82对电磁串进行拍照并传输信号至机器人7,使机器人7能够将电磁串放置在玻璃板上的指定位置,保证排版精度。
28.抓具组件9包括固定在机器人7手部的夹具架91,夹具架91上设有均匀分布的气动夹头92。利用夹具架91上的多个气动夹头92对多个电磁串进行同时夹取,使机器人7能够将电磁串放置在玻璃上。
29.工作原理:该双机器人排版机工作时,通过排版机机架1上的输送线10将太阳能玻璃板进行输送,在输送过程中,气缸一33驱动两个侧定位板34运动,使两个侧定位板34对太阳能玻璃进行预规正,防止玻璃在输送过程中发生跑偏现象,配合挡头133对玻璃进行阻挡,使玻璃能够停在指定位置,玻璃准确进入指定工位后,排版位规正机构5及夹紧气缸规正组件12同时工作,驱动电机52驱动皮带轮53带动皮带54缓慢转动,两侧的两个安装板55随皮带运动并相互靠近,直至将玻璃左右夹持稳定,实现对玻璃板的左右规正,同时夹紧气缸规正组件12的气缸三122通过驱动两个定位头123对玻璃的前后进行夹持,配合排版位规正机构5,能够对玻璃全方位规正并固定,保证玻璃位于指定位置,串输线11输送电磁串,两侧的机器人7夹具架91上的多个气动夹头92对多个电磁串进行同时夹取,多个摄像头82对电磁串进行拍照并传输信号至机器人7,使机器人7能够将电磁串放置在玻璃板上的指定位置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1