双电极熔化极气体保护电弧焊接系统参数的在线快速调整方法
1.本发明涉及一种双电极熔化极气体保护电弧焊接系统参数的在线快速调整方法。
背景技术:
2.随着社会的发展,造船、飞机、集装箱等行业都进入飞速发展的阶段。为了提高市场的竞争力, 现代制造业对焊接生产加工的效率提出了越来越高的要求。提高焊接效率的方法一般有两种,一种是加快 焊接的速度;另一种是提高熔敷的效率。但对于传统的熔化焊,当焊接速度提高到一定程度之后,焊缝成形 会出现咬边和驼峰等缺陷。因此,为进一步研究焊接系统,改善控制效果,高精度的焊接系统模型有助于实 现参数优化,准确的参数辨识是获取正确焊接系统模型的重要手段。
3.由于双电极熔化极气体保护电弧焊接系统是一个复杂的多输入多输出的非线性系统,直接采用 最小二乘法亦或其他现有的参数估计方法对本系统进行参数估计都存在较大的困难。为了提高参数估计的 收敛速度和精度,本文将运用递阶的方法将系统模型分成两部分,并分别使用辅助模型多新息遗忘因子递推 最小二乘算法进行参数估计。本发明以双电极熔化极气体保护电弧焊接系统为基础,给出对应的辨识模型, 通过在辅助模型最小二乘中引入遗忘因子,使用多新息理论将单新息扩展到新息向量,旨在用一种基于遗忘 因子的辅助模型多新息递推最小二乘算法快速准确的辨识分双电极熔化极气体保护电弧焊接系统中的参数
技术实现要素:
4.本发明旨在用一种基于辅助模型多新息遗忘因子递推最小二乘算法应用于双电极熔化极气体保 护电弧焊接非线性模型的参数估计。
5.技术层面的解决方案为:
6.1)构建焊接系统非线性模型的参数辨识模型,具体步骤如下:
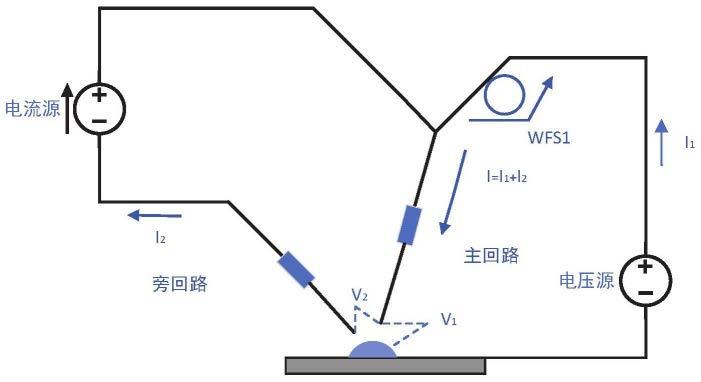
7.第一步:构建焊接系统非线性模型结构如附图1所示:
8.第二步:根据此双电极熔化极气体保护电弧焊接系统图,构建焊接系统非线性模型的输入和输 出关系表达式如下:出关系表达式如下:
9.上述公式中各符号的含义:wfs1是主回路焊丝补给速度,i2是旁路电流,i1是主回路电流,v2是 旁路电弧电压.
10.第三步:构建离散化模型方程表达式如下:i1(t)=c1i1(t-1)+c2wfs1(t-1)+c3i2(t-1)+c4,
11.第四步:得到焊接系统非线性模型的辨识模型为:
12.2)构建基于辅助模型多新息遗忘因子递推最小二乘算法流程:
13.本节通过在辅助模型递推最小二乘算法中引入遗忘因子,并使用多新息辨识理论将单新息扩展 到了多新息向量以提高参数辨识精度,提出了一种辅助模型多新息遗忘因子递推最小二乘算法来估计模型 中的未知参数。
14.第一步:启动辨识算法;
15.第二步,设置初始值;
16.第三步:获取焊接系统的主回路焊丝补给速度wfs1和旁路电流i2作为输入数据,主回路电 流i1,旁路电弧电压v2作为输出数据,构建y(p,t);
17.第四步:构建和
18.第五步:构建φ1(p,t)和φ2(p,t);
19.第六步:构建和
20.第七步:计算p1(t),l1(t)和p2(t),2(t);
21.第八步:更新和
22.第九步:若t=l,得到和结束流程;否则,令t=t+1,返回第三步。
23.其中各变量的定义如下:
24.定义p为新息长度;
25.定义wfs1和i2为输入量,i1和v2为输出量,i1(p,t)和v2(p,t)为信息向量;
26.定义为信息向量和φ(p,t)为信息矩阵;
27.定义e(p,t)为新息向量;
28.定义p(t)为协方差阵和l(t)增益向量;
29.定义θ为参数向量;
30.定义为θ第t次递推的估计值;为e(p,t)第t次递推的估计值。
31.3)根据辅助模型多新息遗忘因子递推最小二乘算法流程,构建辅助模型多新息遗忘因子递推最 小二乘算法:
32.步骤(3)中所述辅助模型多新息遗忘因子递推最小二乘算法为:
33.定义和如下:如下:
34.定义i1(p,t)和v2(p,t)如下:i1(p,t)=[i1(t),i1(t-1),
…
,i1(t-p+1)]
t
,
ꢀꢀꢀ
(4)v2(p,t)=[v2(t),v2(t-1),
…
,v2(t-p+1)]
t
,
ꢀꢀꢀ
(5)
[0035]
定义φ1(p,t)和φ2(p,t)如下:(p,t)如下:
[0036]
定义和如下:
[0037]
定义和如下:如下:
[0038]
定义l1和l2如下:如下:
[0039]
定义p1和p2如下:如下:
[0040]
定义如下:如下:
[0041]
上述算法的具体步骤:
[0042]
1)启动辨识算法,设置初始值:为随机向量,新息长度p;
[0043]
2)获取双电极熔化极气体保护电弧焊接系统的wfs1和i2作为输入数据,i1和v2作为输出数据;
[0044]
3)通过式(4)和(5)获得i1(p,t)和v2(p,t);
[0045]
4)通过式(8)和(9)获得和式(6)和(7)获得φ1(p,t),φ2(p,t);
[0046]
5)通过式(10)和(11)获得和
[0047]
6)通过式(12)和(13)计算l1和l2;
[0048]
7)通过式(14)和(15)计算p1和p2;
[0049]
8)通过式(2)和(16),式(3)和(17)刷新递推所估计的和
[0050]
9)若t=l,得到结束流程;否则,令t=t+1并重复第三步到第八步。
[0051]
其中各变量的定义如下:
[0052]
定义输入量wfs1和i2,输出量i1和v2;
[0053]
定义输出构成的数据组为φ1(p,t)和φ2(p,t);
[0054]
定义和为信息向量;
[0055]
定义φ1(p,t)和φ2(p,t)为信息矩阵;
[0056]
定义新息向量e1(p,t)和e2(p,t);
[0057]
定义协方差阵p1(t)和p2(t);
[0058]
定义增益向量l1(t)和l2(t);
[0059]
定义θ1和θ2为参数向量;
[0060]
定义为θ第t次递推的估计值;为e(p,t)第t次递推的估计值。
[0061]
本发明计算准确,适用于双电极熔化极气体保护电弧焊接系统的参数辨识。
[0062]
下面结合附图和实施例对本发明作进一步说明。
[0063]
图1是表示双电极熔化极气体保护电弧焊接系统的结构。
[0064]
图2是使用该算法后参数c,d的误差曲线图。
[0065]
图3是使用该算法后参数c1,c2,c3,c4随着t的变化曲线。
[0066]
图4是使用该算法后参数d1,d2,d3随着t的变化曲线。
[0067]
图5是使用该算法得到的估计输出与实际输出产生的对比曲线。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1