一种电子元件焊接用机器人及其上料台
1.本发明涉及电子元件加工领域,尤其涉及一种电子元件焊接用机器人及其上料台。
背景技术:
2.电子元件是电子电路中的基本元素,通常是个别封装,并具有两个或以上的引线或金属接点。
3.现在对电子元件与电路板之间进行加工时,需要将电子元件进行焊接,在焊接时会通过人工手动进行焊接。
4.现有的电子元件焊接采用人工操作方式时,容易出现由于操作不当或操作不熟练而引起的安全事故,给生产厂家造成不必要的经济负担和生产压力。面对不同的原件,工人在上岗前需要进行操作技巧、焊接工艺方面的培训,从而造成人员培训和操作成本大,而且电子元件的大小不同,导致每种电子元件的焊接方式不同,并且较小的电子元件在焊接时难度大,易造成生产效率低,良品率低。现有的人工焊接模式,需要人工手动上料,易造成元件受损变形,无法满足使用需求。
5.因此,有必要提供一种电子元件焊接用机器人及其上料台解决上述技术问题。
技术实现要素:
6.本发明提供一种电子元件焊接用机器人及其上料台,解决了现有的电子元件焊接时需要人工手动焊接操作,会导致焊接难度大的问题。
7.为解决上述技术问题,本发明提供的一种电子元件焊接用机器人,包括:
8.操作台,所述操作台表面的一侧安装有升降杆;
9.推动装置,所述推动装置设置于所述升降杆的顶端,所述推动装置包括连通板,所述连通板的表面固定连接有液压推动杆,所述液压推动杆的一端连接有连接杆;
10.圆形板,所述圆形板固定连接于所述连接杆的底端;
11.环形槽,所述环形槽开设于所述圆形板的表面;
12.驱动装置,所述驱动装置设置于所述圆形板的一侧,所述驱动装置包括齿环,所述齿环的一侧啮合有齿轮,所述齿轮的一侧设置有马达,所述马达的表面安装有安装架,所述安装架的一侧连接有限位件;
13.固定杆,所述固定杆连接于所述限位件的底部;
14.焊接装置,所述焊接装置设置于所述固定杆的底端;
15.下料组件,所述下料组件设置于所述圆形板的底部;
16.阻挡组件,所述阻挡组件设置于所述下料组件的下方;
17.一种电子元件焊接用上料台,包括:下料箱;
18.下料装置,所述下料装置设置于所述下料箱的内部,所述下料装置包括第一电机,所述第一电机输出轴的一端通过联轴器固定连接有转动板,所述转动板表面的两侧均设置
有定位座,所述定位座的表面设置有储料箱。
19.优选的,所述圆形板的表面开设有与所述限位件相适配的限位槽。
20.优选的,所述焊接装置包括调节件,所述调节件的内部设置有焊接头,所述调节件的一侧设置有固定件。
21.优选的,所述下料组件包括下料筒,所述下料筒的内部设置有推动件,所述下料筒的表面设置有活动板。
22.优选的,所述阻挡组件包括连接件,所述连接件的一侧连接有阻挡件,所述连接件的一侧连接有拉动件。
23.优选的,所述储料箱的表面开设有通孔,所述转动板表面的中心位置固定安装有移动件。
24.优选的,所述下料箱表面的一侧设置有下料件。
25.优选的,所述下料件的一侧设置有转动装置,所述转动装置包括第二电机,所述第二电机输出轴的一端通过联轴器固定连接有旋转板。
26.优选的,所述旋转板的表面设置有多个放置组件,所述放置组件包括放置盒,所述放置盒内壁的底部设置有多个滚轮。
27.与相关技术相比较,本发明提供的一种电子元件焊接用机器人及其上料台具有如下有益效果:
28.本发明提供一种电子元件焊接用机器人及其上料台,在升降杆的顶端设置连通板和液压推动杆配合连接杆进行前后位置的移动,可以带动圆形板进行位置的调节,在环形槽的内部设置齿环配合齿轮和马达使用可以带动焊接装置进行转动,可以对圆形电子原件进行焊接,从而代替人工手动焊接的操作,能提高电子原件的加工速度,提高电子原件的合格率,也能简便焊接的难度,在安装架的表面设置限位件配合限位槽能在马达转动时起到限位的作用,在圆形板的底部设置下料组件能对圆形电子原件进行储存,方便焊接时对电子原件进行下料操作,在下料组件的下方设置阻挡组件能防止内部的电子原件出现掉落,可以防止装置加工时受到影响。
附图说明
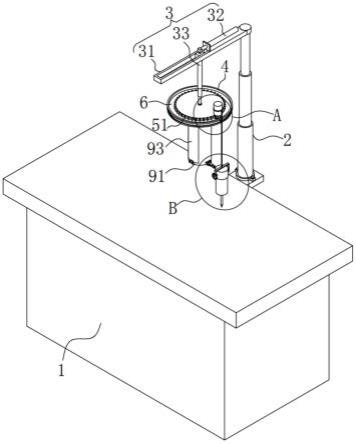
29.图1为本发明提供的一种电子元件焊接用机器人及其上料台的第一实施例的结构示意图;
30.图2为图1所示的a部放大示意图;
31.图3为图1所示的b部放大示意图;
32.图4为图3所示的c部放大示意图;
33.图5为图1所示的装置整体的结构示意图;
34.图6为本发明提供的一种电子元件焊接用机器人及其上料台的第二实施例的结构示意图;
35.图7为图6所示的d部放大示意图;
36.图8为图6所示的e部放大示意图;
37.图9为本发明提供的一种电子元件焊接用机器人及其上料台的第三实施例的结构示意图;
38.图10为图9所示的f部放大示意图。
39.图中标号:1、操作台,2、升降杆,
40.3、推动装置,31、连通板,32、液压推动杆,33、连接杆,
41.4、圆形板,
42.5、驱动装置,51、齿环,52、齿轮,53、马达,54、安装架,55、限位件,56、限位槽,
43.6、环形槽,7、固定杆,
44.8、焊接装置,81、调节件,811、u形固定块,812、连接块,82、焊接头,83、固定件,
45.9、下料组件,91、下料筒,92、推动件,93、活动板,
46.10、阻挡组件,101、连接件,102、阻挡件,103、拉动件,
47.11、下料箱,
48.12、下料装置,121、第一电机,122、转动板,123、定位座,124、储料箱,125、移动件,126、通孔,
49.13、下料件,
50.14、转动装置,141、第二电机,142、旋转板,
51.15、放置组件,151、放置盒,152、滚轮,
52.16、拿取装置,161、固定架,162、第三电机,163、转板,164、液压伸缩杆,165、连接架,166、吸泵。
具体实施方式
53.下面结合附图和实施方式对本发明作进一步说明。
54.第一实施例
55.请结合参阅图1、图2、图3、图4和图5,其中,图1为本发明提供的一种电子元件焊接用机器人及其上料台的第一实施例的结构示意图;图2为图1 所示的a部放大示意图;图3为图1所示的b部放大示意图;图4为图3所示的c部放大示意图;图5为图1所示的装置整体的结构示意图。一种电子元件焊接用机器人,包括:
56.操作台1,所述操作台1表面的一侧安装有升降杆2;
57.推动装置3,所述推动装置3设置于所述升降杆2的顶端,所述推动装置3包括连通板31,所述连通板31的表面固定连接有液压推动杆32,所述液压推动杆32的一端连接有连接杆33;
58.在升降杆2的底部连接有底块,底块的一侧与操作台1表面的一侧连接,在连通板31的表面连接有矩形块,液压推动杆32通过螺纹栓与矩形块表面的一侧螺纹连接。
59.圆形板4,所述圆形板4固定连接于所述连接杆33的底端;
60.环形槽6,所述环形槽6开设于所述圆形板4的表面;
61.驱动装置5,所述驱动装置5设置于所述圆形板4的一侧,所述驱动装置 5包括齿环51,所述齿环51的一侧啮合有齿轮52,所述齿轮52的一侧设置有马达53,所述马达53的表面安装有安装架54,所述安装架54的一侧连接有限位件55;
62.齿轮51设置在环形槽6的内部,限位件55的一侧连接有定位块,在限位槽56内壁的一侧开设有与定位块相适配的定位槽,使用定位块和定位槽能防止限位件55的脱落。
63.固定杆7,所述固定杆7连接于所述限位件55的底部;
64.焊接装置8,所述焊接装置8设置于所述固定杆7的底端;
65.下料组件9,所述下料组件9设置于所述圆形板4的底部;
66.阻挡组件10,所述阻挡组件10设置于所述下料组件9的下方。
67.所述圆形板4的表面开设有与所述限位件55相适配的限位槽56。
68.所述焊接装置8包括调节件81,所述调节件81的内部设置有焊接头82,所述调节件81的一侧设置有固定件83。
69.调节件81包括u形固定块811,在u形固定块811内壁的两侧均连接有连接块812,在两个连接块812之间连接有螺纹套,在焊接头82的表面开设有与螺纹套相适配的螺纹,其中一个连接块通过转动轴与u形固定块811内壁的一侧转动连接,固定件83包括圆形连接块,在圆形连接块的表面套设有圆形块,在圆形块的表面开设有多个连通孔,在通孔的内部设置有固定栓,在 u形固定块811表面的一侧开设有与固定栓相适配的固定槽,圆形连接块的与另外的一侧连接块连接,圆形连接块与u形固定块811的连接处通过轴承连接。
70.所述下料组件9包括下料筒91,所述下料筒91的内部设置有推动件92,所述下料筒91的表面设置有活动板93。
71.下料筒91固定在圆形板4底部的中心位置,活动板93与下料筒91之间通过铰链铰接,在活动板93的一侧设置有锁扣,能与下料筒91进行连接。
72.所述阻挡组件10包括连接件101,所述连接件101的一侧连接有阻挡件102,所述连接件101的一侧连接有拉动件103。
73.连接件110包括连接座,在连接座的一侧连接有限位块,阻挡件102包括阻挡板,在阻挡板的表面开设有与限位块相适配的限位槽,在限位块的一侧连接有卡块,在限位槽内壁的一侧开设有卡块相适配的卡槽,使用卡块和卡槽能防止阻挡件102的脱落,连接件101与下料筒91的表面连接。
74.本发明提供的一种电子元件焊接用机器人及其上料台的工作原理如下:
75.使用时,当进行电子原件焊接时,操作者首先启动连通板31表面的液压推动杆32带动连接杆33进行移动,当连接杆33移动时带动底部焊接装置8 和下料组件9进行位置的调节,当下料组件9移动至合适的位置后,操作者停止液压推动杆32,并启动下料筒91表面一侧的拉动件103带动连接件101下方的阻挡件102向一侧移动,当阻挡件102移动至与下料筒91分离后,启动下料筒91内部的推动件92推动内部的电子原件向操作台1的一侧进行移动,当下料筒91内部的电子原件移动至操作台1的表面后,再起启动拉动件103 带动阻挡件102移动至下料筒91的底部对电子原件进行阻挡即可。
76.当放置好电子原件后再通过调节件81对焊接头82进行角度的调节,当调节好焊接头82后通过调节件81一侧的固定件83进行固定,当焊接头82后,操作者再启动马达53带动齿轮52在环形槽6内部的齿环51一侧进行移动,当齿轮52在齿环51的一侧移动时带动安装架54进行移动,当安装架54移动时带动限位件55在限位槽56的内部进行移动,当限位件55移动时还带动底部的固定杆7进行移动,当固定杆76移动至带动焊接头82对电子原件进行焊接即可。
77.与相关技术相比较,本发明提供的一种电子元件焊接用机器人及其上料台具有如下有益效果:
78.本发明提供一种电子元件焊接用机器人及其上料台,在升降杆2的顶端设置连通
板31和液压推动杆32配合连接杆33进行前后位置的移动,可以带动圆形板4进行位置的调节,在环形槽6的内部设置齿环51配合齿轮52和马达 53使用可以带动焊接装置8进行转动,可以对圆形电子原件进行焊接,从而代替人工手动焊接的操作,能提高电子原件的加工速度,提高电子原件的焊接合格率,在安装架54的表面设置限位件55配合限位槽56能在马达53转动时起到限位的作用,在圆形板4的底部设置下料组件9能对圆形电子原件进行储存,方便焊接时对电子原件进行下料操作,在下料组件9的下方设置阻挡组件 10能防止内部的电子原件出现掉落,可以防止装置加工时受到影响。
79.第二实施例
80.请结合参阅图6、图7和图8,基于本技术的第一实施例提供的一种电子元件焊接用机器人及其上料台,本技术的第二实施例提出另一种电子元件焊接用机器人及其上料台。第二实施例仅仅是第一实施例优选的方式,第二实施例的实施对第一实施例的单独实施不会造成影响。
81.具体的,本技术的第二实施例提供的一种电子元件焊接用机器人及其上料台的不同之处在于,一种电子元件焊接用上料台,包括:下料箱11;
82.下料装置12,所述下料装置12设置于所述下料箱11的内部,所述下料装置12包括第一电机121,所述第一电机121输出轴的一端通过联轴器固定连接有转动板122,所述转动板122表面的两侧均设置有定位座123,所述定位座123的表面设置有储料箱124。
83.第一电机121通过螺栓与下料箱11的的底部螺纹连接,第一电机121和第二电机141均为伺服电机,在储料箱124的底部连接有与定位座123相适配的定位套,使用定位座和定位套能方便将储料箱124进行安装,在下料箱11 的顶部设置有箱门。
84.所述储料箱124的表面开设有通孔126,所述转动板122表面的中心位置固定安装有移动件125。
85.在下料箱11的表面也相对的开设有通孔126,在通孔126和下料件13的内部均设置有滚动珠,使用滚动珠能方便电子元件移动时减少摩擦,移动件 125包括固定座,在固定座表面的两侧均安装有液压伸缩杆,在液压伸缩杆的一端连接有推动杆,使用推动杆方便将储料箱124内部的电子原件进行输送。。
86.所述下料箱11表面的一侧设置有下料件13。
87.所述下料件13的一侧设置有转动装置14,所述转动装置14包括第二电机141,所述第二电机141输出轴的一端通过联轴器固定连接有旋转板142。
88.在操作台1的内部开设有安装腔,第二电机141通过螺栓与安装腔内壁的顶部螺纹连接。
89.所述旋转板142的表面设置有多个放置组件15,所述放置组件15包括放置盒151,所述放置盒151内壁的底部设置有多个滚轮152。
90.本发明提供的一种电子元件焊接用机器人及其上料台的工作原理如下:
91.使用时,当对电子原件进行下料操作时,操作者首先启动下料箱11底部的第一电机121带动下料箱11内部的转动板122进行转动,当转动板122转动时带动储料箱124向下料件13的一侧进行转动,当储料箱124转动至与下料件13相对的一侧后,再启动转动板122表面的移动件125穿过通孔126的内壁对电子元件输送置下料件13的内部,当电子元件移动至下料件13的内部后输送至放置盒151的内部,当电子元件移动至放置盒151的内部后再通过
放置盒151内部的滚轮152将电子元件完整的放置在放置盒151的内部。
92.当其中一侧放置盒151的内部放置好电子元件后,在启动第二电机141 带动旋转板142带动未放置电子元件的放置盒151移动至下料件13的下方即可。
93.与相关技术相比较,本发明提供的一种电子元件焊接用机器人及其上料台具有如下有益效果:
94.本发明提供一种电子元件焊接用机器人及其上料台,在操作台1表面的一侧设置下料箱11能对多个储料箱124起到储存的作用,在下料箱11的底部设置第一电机121和转动板122能带动多个储料箱124进行转动,可以带动储料箱124与下料件13相接触,在转动板122的表面设置移动件125可以将储料箱124内部的电子原件向下料件13的一侧进行推动,在储料箱124的底部和下料箱11的底部开设通孔126能方便将电子原件输送至指定的位置,在操作台1的表面设置第二电机141和旋转板142配合放置组件15使用带动电子原件输送至焊接装置8的下方进行焊接,在放置盒151的内部设置多个滚轮152 能方便将电子原件放置的放置盒151的内部。
95.第三实施例
96.请结合参阅图9和图10,基于本技术的第一实施例提供的一种电子元件焊接用机器人及其上料台,本技术的第三实施例提出另一种电子元件焊接用机器人及其上料台。第三实施例仅仅是第一实施例优选的方式,第三实施例的实施对第一实施例的单独实施不会造成影响。
97.具体的,本技术的第三实施例提供的一种电子元件焊接用机器人及其上料台的不同之处在于,一种电子元件焊接用机器人及其上料台,所述操作台1 表面的一侧设置有拿取装置16,所述拿取装置16包括固定架161,所述固定架161的顶端安装有第三电机162,所述第三电机162输出轴的一端通过联轴器固定连接有转板163,所述转板163底部的两侧均连接有液压伸缩杆164,所述液压伸缩杆164的底端固定连接有连接架165,所述连接架165的内部设置有吸泵166。
98.第三电机162也为伺服电机,吸泵166包括泵体,在泵体的输入端连接有连接管,在连接管的一端连接有橡胶吸盘。
99.本发明提供的一种电子元件焊接用机器人及其上料台的工作原理如下:
100.使用时,当需要对焊接好的电子原件进行拿取时,操作者启动液压伸缩杆 164带动吸泵166向放置盒151的内部进行移动,当吸泵166移动至放置盒151 的内部后并与电子元件接触后,启动吸泵166对电子元件进行吸取,当吸泵 166对电子元件吸取后,操作者再启动液压伸缩杆164带动电子元件移动至放置盒151的外侧,当电子元件移动至放置盒151的外侧后,操作者再启动第三电机162带动带有电子元件的转板163进行转动,当电子元件移动指定的位置后即可停止第三电机162的转动。
101.与相关技术相比较,本发明提供的一种电子元件焊接用机器人及其上料台具有如下有益效果:
102.本发明提供一种电子元件焊接用机器人及其上料台,在固定架161的顶端设置第三电机162能带动转板163进行转动,当转板163转动时可以通过吸泵 66带动电子元件移动至指定的位置,使用吸泵66可以将放置盒151内部的电子元件进行拿取,液压伸缩杆164的使用可以带动吸泵66进行各种高度的调节。
103.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1