一种五轴头C轴旋转角度限位方法与流程
一种五轴头c轴旋转角度限位方法
技术领域
1.本发明属于五轴头c轴旋转控制技术领域,涉及一种五轴头c轴旋转角度限位方法。
背景技术:
2.五轴头是五轴机床的关键功能部件,c轴需要360
°
旋转,c轴内部的线缆和管路众多,五轴头c轴旋转时内部线缆及管路运动复杂,c轴旋转角度过大或者旋转失控会损坏内部线缆和管路甚至造成安全事故,所以亟需这一种控制方法对五轴机床五轴头的c轴进行旋转角度限位控制。
技术实现要素:
3.为解决上述技术问题,本发明的目的是提供一种五轴头c轴旋转角度限位方法,通过合理设置限位开关和触点位置,根据旋转方向常数k的赋值情况和限位开关触发情况,即可实现五轴头c轴的角度限位控制。
4.本发明提供一种五轴头c轴旋转角度限位方法,包括如下步骤:步骤1:在c轴固定壳上设置逆时针限位开关、顺时针限位开关和重叠区域判断开关,同时在c轴上设置逆时针限位触点、顺时针限位触点和重叠区域判断触点;步骤2:定义旋转方向常数k,当c轴顺时针进入到角度重叠区时,将旋转方向常数k赋值为“1”;当c轴逆时针进入角度重叠区时,将旋转方向常数k赋值为“0”;步骤3:判断c轴当前所处的角度位置,即确定c轴位于角度重叠区或角度非重叠区,如果当前c轴处于角度非重叠区内,则执行步骤4,否则执行步骤7;步骤4:如果当前c轴处于角度非重叠区内,判断c轴的旋转方向,当c轴顺时针旋转时执行步骤5,当c轴逆时针旋转时执行步骤6;步骤5:当逆时针限位开关触发时,控制系统将旋转方向常数k赋值为“1”,同时屏蔽逆时针触发信号,继续旋转当顺时针限位开关触发时,控制系统发出c轴顺时针限位指令,控制c轴停止旋转;步骤6:当顺时针限位开关触发时,控制系统将旋转方向常数k赋值为“0”,同时屏蔽顺时针触发信号,继续旋转当逆时针限位开关触发时,控制系统发出c轴逆时针限位指令,控制c轴停止旋转;步骤7:如果当前c轴处于角度重叠区内,判断旋转方向常数k的赋值情况,当旋转方向常数k为“1”时执行步骤8,当旋转方向常数k为“0”时执行步骤9;步骤8:若c轴顺时针旋转,当顺时针限位开关触发时,控制系统发出c轴顺时针限位指令,c轴停止旋转;若c轴逆时针旋转,当逆时针限位开关触发时,控制系统将旋转方向常数k赋值为“0”,同时屏蔽逆时针触发信号,继续旋转当顺时针限位开关触发时,发出c轴顺时针限位指令,c轴停止旋转;步骤9:若c轴逆时针旋转,当逆时针限位开关触发,控制系统发出c轴逆时针限位
指令,控制c轴停止旋转;若c轴顺时针旋转,顺时针限位开关触时,控制系统将旋转方向常数k赋值为“1”,同时屏蔽顺时针触发信号,继续旋转当顺时针限位开关触发时,发出c轴顺时针限位指令,c轴停止旋转。
5.在本发明的五轴头c轴旋转角度限位方法中,所述步骤1具体为:以c轴上的绝对值角度编码器0度点为c轴的机械零点,逆时针限位开关设置在190度的位置,顺时针限位开关设置在170度的位置,重叠区域判断开关在210度的位置;逆时针限位触点和顺时针限位触点设置在同一角度位置,逆时针限位触点设置在顺时针限位触点上方,逆时针限位触点与c轴轴心的距离大于顺时针限位触点与c轴轴心的距离;重叠区域判断触点设置在所述角度重叠区,重叠区域判断触点的感应范围是20度,重叠区域判断触点中线与逆时针限位触点的夹角为20度;逆时针限位开关和顺时针限位开关分别位于角度重叠区的两侧边界线上。
6.在本发明的五轴头c轴旋转角度限位方法中,所述步骤3中当重叠区域判断开关触发时,则c轴位于角度重叠区内。
7.在本发明的五轴头c轴旋转角度限位方法中,当c轴顺时针旋转时,角度增量为负;当c轴逆时针旋转时,角度增量为正。
8.五轴头是中、大规格五轴联动加工中心的核心功能部件,属于典型的“卡脖子”产品。本发明从机械和电气控制综合角度提出一种新方法,解决了五轴头c轴角度限位问题,其原理清晰、实现方法简单,硬件方面仅需增设3限位开关和相应触点,成本低。本发明通过合理设置限位开关和触点位置,根据旋转方向常数k的赋值情况和限位开关触发情况,即可实现五轴头c轴的角度限位控制。本发明的五轴头c轴旋转角度限位方法可靠性高,保证了五轴头c轴运动的可靠性。
附图说明
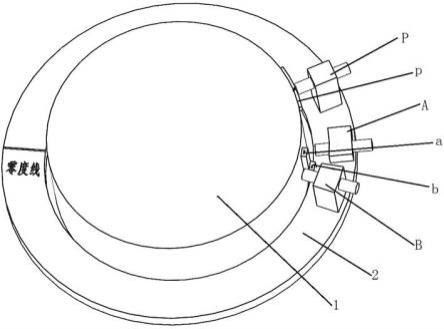
9.图1是开关及其触点的布置示意图;图2是c轴顺时针和逆时针旋转示意图;图3是c轴控制时序图。
具体实施方式
10.本发明提供一种五轴头c轴旋转角度限位方法,包括如下步骤:步骤1:在c轴固定壳2上设置逆时针限位开关a、顺时针限位开关b和重叠区域判断开关p,同时在c轴1上设置逆时针限位触点a、顺时针限位触点b和重叠区域判断触点p,如图1所示。
11.具体实施时,逆时针限位触点a和顺时针限位触点b只能触发相应的逆时针限位开关a和顺时针限位开关b,逆时针限位触点a和顺时针限位触点b触发的临界角度区域为角度重叠区,即重叠区域判断触点p可触发重叠区域判断开关p的区域。
12.具体实施时,以c轴1上的绝对值角度编码器0度点为c轴1的机械零点,逆时针限位开关a设置在190度的位置,顺时针限位开关b设置在170度的位置,重叠区域判断开关p在210度的位置;逆时针限位触点a和顺时针限位触点b设置在同一角度位置,逆时针限位触点
a设置在顺时针限位触点b上方,逆时针限位触点a与c轴轴心的距离大于顺时针限位触点b与c轴轴心的距离;重叠区域判断触点p设置在所述角度重叠区,重叠区域判断触点p的感应范围是20度,重叠区域判断触点p的中线与逆时针限位触点a的夹角为20度;逆时针限位开关a和顺时针限位开关b分别位于角度重叠区的两侧边界线上。
13.步骤2:定义旋转方向常数k,当c轴1顺时针进入到角度重叠区时,将旋转方向常数k赋值为“1”;当c轴1逆时针进入角度重叠区时,将旋转方向常数k赋值为“0”;具体实施时,机床控制系统的c轴运转控制程序自定义旋转方向常数k,根据c轴1的旋转方向,进行“0”和“1”赋值。旋转方向常数k用于控制程序对逆时针限位信号和顺时针限位信号输入是否有效的条件判断。
14.步骤3:判断c轴1当前所处的角度位置,即确定c轴1位于角度重叠区或角度非重叠区,如果当前c轴1处于角度非重叠区内,则执行步骤4,否则执行步骤7;具体实施时,当重叠区域判断开关p触发时,则判定c轴1位于角度重叠区内。
15.步骤4:如果当前c轴1处于角度非重叠区内,判断c轴1的旋转方向,当c轴1顺时针旋转时执行步骤5,当c轴1逆时针旋转时执行步骤6;步骤5:当逆时针限位开关触发时,控制系统将旋转方向常数k赋值为“1”,同时屏蔽逆时针触发信号,继续旋转当顺时针限位开关触发时,控制系统发出c轴顺时针限位指令,控制c轴1停止旋转;步骤6:当顺时针限位开关触发时,控制系统将旋转方向常数k赋值为“0”,同时屏蔽顺时针触发信号,继续旋转当逆时针限位开关触发时,控制系统发出c轴逆时针限位指令,控制c轴1停止旋转;步骤7:如果当前c轴1处于角度重叠区内,判断旋转方向常数k的赋值情况,当旋转方向常数k为“1”时执行步骤8,当旋转方向常数k为“0”时执行步骤9;步骤8:若c轴1顺时针旋转,当顺时针限位开关触发时,控制系统发出c轴顺时针限位指令,c轴1停止旋转;若c轴1逆时针旋转,当逆时针限位开关触发时,控制系统将旋转方向常数k赋值为“0”,同时屏蔽逆时针触发信号,继续旋转当顺时针限位开关触发时,发出c轴顺时针限位指令,c轴1停止旋转;步骤9:若c轴1逆时针旋转,当逆时针限位开关触发,控制系统发出c轴逆时针限位指令,控制c轴1停止旋转;若c轴1顺时针旋转,顺时针限位开关触时,控制系统将旋转方向常数k赋值为“1”,同时屏蔽顺时针触发信号,继续旋转当顺时针限位开关触发时,发出c轴顺时针限位指令,c轴1停止旋转。
16.具体实施时,当c轴1顺时针旋转时,角度增量为负;当c轴1逆时针旋转时,角度增量为正。图2是c轴1顺时针和逆时针旋转示意图。
17.如图3所示的时序图,c轴1根据控制系统指令旋转,从0度线开始旋转,分成2种情况:第一种情况,顺时针方向旋转,在旋转至-170度值时,逆时针限位开关a被逆时针限位触点a触发,逆时针限位开关a向系统发出高电平信号,同时重叠区域判断开关p被重叠区域判断触点p触发,重叠区域判断开关p向系统发出高电平信号,旋转方向常数k被赋值为“1”。
18.c轴1可继续顺时针旋转,至-190度时,顺时针限位开关b被顺时针触点b触发,顺时
针限位开关b向系统发出高电平信号,系统执行顺时针限位操作,c轴1停止旋转。
19.第二种情况,逆时针方向旋转,在旋转至170度值时,顺时针限位开关b被顺时针限位触点b触发,顺时针限位开关b向系统发出高电平信号,重叠区域判断开关p被重叠区域判断触点p触发,重叠区域判断开关p向系统发出高电平信号,旋转方向常数k被赋值为“0”。
20.c轴1可继续逆时针旋转,至190度时,逆时针限位开关a被逆时针限位开关a触发,逆时针限位开关a向系统发出高电平信号,系统执行逆时针限位操作,c轴1停止旋转。
21.本发明从机械和电气控制综合角度提出一种新方法,解决了五轴头c轴角度限位问题,其原理清晰,实现方法简单、成本低,可靠性高,保证了五轴头c轴运动的可靠性。
22.以上所述仅为本发明的较佳实施例,并不用以限制本发明的思想,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1