一种具有防抖功能的高精度激光切割设备的制作方法
1.本发明涉及激光切割领域,尤其涉及一种具有防抖功能的高精度激光切割设备。
背景技术:
2.激光切割在对物体进行切割工作过程中,需要用聚焦镜将co2激光束聚焦在材料表面使材料熔化,并用与激光束同轴的压缩气体吹走被熔化的材料,在按指定轨迹行走期间完成切割,为避免激光束对支撑被切割物的底板造成伤害,常使用锯齿板对被切割物进行支撑工作。
3.中国专利cn109732221a所述的激光切割装置使用双层锯齿板可替换式对被切割物进行支撑工作,减少了换件的时间,提高了切割效率,但是在激光切割枪体对被切割物进行切割工作前,需要激光切割枪体贴近被切割物进行定位定边工作,以保证切割精确度,然而由于支撑被切割物的锯齿板中存在大量的空隙区域,激光切割枪体在贴近被切割物时,没有有效的夹持设备固定被切割物,导致被切割物易产生细微的偏移,并且在后续的激光切割工作期间,被切割物受激光束的冲击也易产生偏移,特别是厚度较薄的或刚度较弱的材料,在切割过程中常出现抖动,影响切割工作的稳定进行,若使用大力钳等夹持工具将被切割物固定在支撑件上,则需要耗费大量的时间进行夹持定位工作,并且大体积的夹持工具将影响激光切割枪体的有效活动范围。
技术实现要素:
4.为了克服没有有效的夹持设备固定被切割物,导致被切割物在切割过程中常出现抖动,以及使用夹持工具对切割物固定则需要耗费大量的时间,并易影响激光切割枪体的有效活动范围的缺点,本发明提供一种具有防抖功能的高精度激光切割设备。
5.本发明的技术实施方案为:一种具有防抖功能的高精度激光切割设备,包括有定位单元、卡设组件、底架台、安装架、传送钢带、测距仪、导轨、激光切割枪体、集成板和锯齿条;底架台的上部固接有安装架;安装架的左侧和右侧各安装有一个电动转轴;两个电动转轴的外表面之间套设有传送钢带;安装架的右侧上部安装有测距仪;安装架的前侧和后侧各安装有一个导轨;两个导轨左侧之间连接有一个定位单元;两个导轨右侧之间也连接有一个定位单元;两个定位单元的前侧和后侧各连接有一个卡设组件;安装架内部的第二升降机构将集成板向上升起,集成板的上表面固接有若干个锯齿条,并且每个锯齿条的上侧前后方向各固接有若干个锯齿块,集成板带动锯齿块向上升起期间,锯齿块的上侧穿过传送钢带外表面开设的条形槽结构,锯齿块将传送钢带上传送的被切割物向上撑起,每个定位单元分别控制两个卡设组件,将被切割物摆正,再将四个卡设组件分别卡住被切割物的四个边角,并让四个卡设组件分别锁紧在锯齿块前后两侧的第一卡槽中,定位单元离开被切割物后,两个导轨的中部之间连接的多轴位移单元,控制激光切割枪体对被切割物进行切割处理。
6.优选地,多轴位移单元包括有第一电动滑块、第一气缸和滑动机构;两个导轨的中
部各滑动连接有一个第一电动滑块;两个第一电动滑块之间安装有第一气缸;第一气缸的中部滑动连接有滑动机构;滑动机构的中部连接激光切割枪体。
7.优选地,第二升降机构包括有第一滑块和第一电动推杆;集成板的前侧和后侧各固接有两个第一滑块;四个第一滑块均滑动连接安装架;安装架的左侧和右侧分别通过转轴各转动连接有两个第一电动推杆;四个第一电动推杆的伸缩端分别通过转轴均转动连接集成板。
8.优选地,锯齿块的两个第一卡槽分别位于锯齿块的前侧中部和后侧中部,并且所有锯齿块的第一卡槽均位于同一水平高度。
9.优选地,定位单元包括有第二电动滑块、第二滑块、第二电动推杆、电动导轨、第三电动滑块和机械夹;两个导轨上各滑动连接有一个第二电动滑块;两个第二电动滑块的上侧各固接有一个第二电动推杆;两个第二电动滑块的中部各滑动连接有一个第二滑块;两个第二电动推杆的伸缩端各固接一个第二滑块;两个第二滑块之间固接有电动导轨;电动导轨的前侧和后侧各滑动连接有一个第三电动滑块;两个第三电动滑块的下侧各安装有一个机械夹;两个机械夹各连接一个卡设组件。
10.优选地,卡设组件包括有连接杆、锁块、伸缩杆、固定块、第一弹簧、伸缩臂、卡板和第二弹簧;机械夹的下侧夹持有连接杆;连接杆的左端和右端各固接有一个锁块;两个锁块远离相邻导轨的一侧各固接有一个伸缩杆;两个伸缩杆各固接有一个固定块;两个锁块与固定块之间各固接有一个第一弹簧,第一弹簧套设在相邻伸缩杆的外表面;两个固定块的左侧和右侧各固接有一个伸缩臂;四个伸缩臂的上端之间滑动连接有卡板;卡板与两个固定块之间各固接有一个第二弹簧。
11.优选地,机械夹的两个夹杆内侧各开设有一个与连接杆相对应的第二卡槽结构。
12.优选地,锁块的外侧各开设有一个与锯齿块的第一卡槽部位相适应的第三卡槽结构。
13.优选地,卡板均设置为倒l形结构。
14.优选地,卡板的中部均开设有一个竖槽结构,避免机械夹在活动过程中与卡板产生干涉。
15.有益效果:本发明的锯齿块设置为升降式,在传送钢带将被切割物产生至指定位置之后,安装架内部的第二升降机构将集成板向上升起,集成板上集成有若干个锯齿块,集成板带动锯齿块向上升起期间,锯齿块的上侧穿过传送钢带外表面开设的条形槽结构,锯齿块将传送钢带上传送的被切割物向上撑起,由于锯齿块的位置固定不变,因此容易完成对被切割物的自动定位工作,两个定位单元分别控制四个卡设组件,将被切割物摆正,再将四个卡设组件分别卡住被切割物的四个边角,并让四个卡设组件分别锁紧在锯齿块前后两侧的第一卡槽中,定位单元离开被切割物后,两个导轨的中部之间连接的多轴位移单元,控制激光切割枪体对被切割物进行切割处理;通过上述处理步骤,实现提供有效的卡设组件将被切割物固定在锯齿块上,防止被切割物在切割过程中出现抖动,并且卡设组件体积和高度均较小,在保证快速对被切割物产生稳定的固定效果同时,不影响激光切割枪体的有效活动范围;实现将一个未知摆放状态的被切割物自动正位呈平直状态并配合夹紧,无需人工校正,降低人工操作的难度及工作量;
由于固定块与锁块之间是通过伸缩杆和第一弹簧连接,那么固定块与锁块是存在一个可控制的活动空间,即使被切割物的尺寸不匹配多排锯齿块的距离数值,此时通过固定块与锁块之间的可控制活动空间就可以补偿被切割物的尺寸与多排锯齿块距离数值的差值,实现对不同尺寸被切割物的自动适配。
附图说明
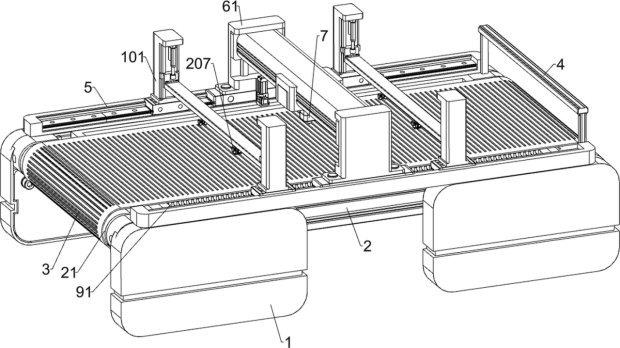
16.图1为本技术的具有防抖功能的高精度激光切割设备的立体结构示意图;图2为本技术的传送钢带和测距仪的立体结构示意图;图3为本技术的多轴位移单元立体结构示意图;图4为本技术的安装架立体结构示意图;图5为本技术的第二升降机构立体结构示意图;图6为本技术的锯齿条和锯齿块的立体结构示意图;图7为本技术的锯齿块立体结构示意图;图8为本技术的定位单元立体结构示意图;图9为本技术的定位单元与卡设组件的立体结构示意图;图10为本技术的卡设组件立体结构示意图;图11为本技术的机械夹立体结构示意图;图12为本技术的工作状态图;图13为本技术的v区放大图。
17.附图中各零部件的标记如下:1-底架台,2-安装架,21-电动转轴,3-传送钢带,31-条形槽,4-测距仪,5-导轨,61-第一电动滑块,62-第一气缸,63-滑动机构,7-激光切割枪体,8-集成板,81-第一滑块,82-第一电动推杆,9-锯齿条,91-锯齿块,911-第一卡槽,10-被切割物,101-第二电动滑块,102-第二滑块,103-第二电动推杆,104-电动导轨,105-第三电动滑块,106-机械夹,1061-第二卡槽,201-连接杆,202-锁块,2021-第三卡槽,203-伸缩杆,204-固定块,205-第一弹簧,206-伸缩臂,207-卡板,2071-竖槽,208-第二弹簧。
具体实施方式
18.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
实施例
19.一种具有防抖功能的高精度激光切割设备,如图1-图13所示,包括有定位单元、卡设组件、底架台1、安装架2、传送钢带3、测距仪4、导轨5、激光切割枪体7、集成板8和锯齿条9;底架台1的上部螺栓连接有安装架2;安装架2的左侧和右侧各安装有一个电动转轴21;两个电动转轴21的外表面之间套设有传送钢带3;安装架2的右侧上部安装有测距仪4;安装架2的前侧和后侧各安装有一个导轨5;两个导轨5的中部之间通过多轴位移单元安装有激光切割枪体7;安装架2的内部通过第二升降机构安装有集成板8;集成板8的上表面螺栓连接
有若干个锯齿条9;每个锯齿条9的上侧前后方向各焊接有若干个锯齿块91;环绕传送钢带3的外表面开设有若干个宽度与锯齿块91相适应的条形槽31结构;每个锯齿块91的前侧和后侧各开设有一个第一卡槽911;两个导轨5左侧之间共同连接有一个定位单元;两个导轨5右侧之间也共同连接有一个定位单元;每个定位单元的前侧和后侧各连接有一个卡设组件。
20.如图3所示,多轴位移单元包括有第一电动滑块61、第一气缸62和滑动机构63;两个导轨5的中部各滑动连接有一个第一电动滑块61;两个第一电动滑块61之间安装有第一气缸62;第一气缸62的伸缩端连接有滑动机构63;滑动机构63的中部连接激光切割枪体7。如图5所示,第二升降机构包括有第一滑块81和第一电动推杆82;集成板8的前侧和后侧各螺栓连接有两个第一滑块81;四个第一滑块81均滑动连接安装架2;安装架2的左侧和右侧分别通过转轴转动连接有两个第一电动推杆82;四个第一电动推杆82的伸缩端分别通过转轴均转动连接集成板8。
21.如图7所示,锯齿块91的两个第一卡槽911分别位于锯齿块91的前侧中部和后侧中部,并且所有锯齿块91的第一卡槽911均位于同一水平高度。
22.如图8和图9所示,定位单元包括有第二电动滑块101、第二滑块102、第二电动推杆103、电动导轨104、第三电动滑块105和机械夹106;两个导轨5上各滑动连接有一个第二电动滑块101;两个第二电动滑块101的上侧各螺栓连接有一个第二电动推杆103;两个第二电动滑块101的中部各滑动连接有一个第二滑块102;两个第二电动推杆103的伸缩端各螺栓连接一个第二滑块102;两个第二滑块102之间螺栓连接有电动导轨104;电动导轨104的前侧和后侧各滑动连接有一个第三电动滑块105;两个第三电动滑块105的下侧各安装有一个机械夹106;两个机械夹106各连接一个卡设组件。
23.如图9和图10所示,卡设组件包括有连接杆201、锁块202、伸缩杆203、固定块204、第一弹簧205、伸缩臂206、卡板207和第二弹簧208;机械夹106的下侧夹持有连接杆201;连接杆201的左端和右端各焊接有一个锁块202;锁块202的外侧各开设有一个与锯齿块91的第一卡槽911部位相适应的第三卡槽2021结构;两个锁块202远离相邻导轨5的一侧各固接有一个伸缩杆203;两个伸缩杆203各固接有一个固定块204;两个锁块202与固定块204之间各固接有一个第一弹簧205,第一弹簧205套设在相邻伸缩杆203的外表面;两个固定块204的左侧和右侧各固接有一个伸缩臂206;四个伸缩臂206的上端之间滑动连接有卡板207;卡板207与两个固定块204之间各固接有一个第二弹簧208;卡板207均设置为倒l形结构;卡板207的中部均开设有一个竖槽2071结构。
24.如图11所示,机械夹106的两个夹杆内侧各开设有一个与连接杆201相对应的第二卡槽1061结构。
25.本发明的锯齿块91集成在升降式的集成板8上,初始集成板8及锯齿块91隐藏于传送钢带3的内部,电动转轴21带动传送钢带3从右向左对被切割物10进行传送过程中,被切割物10的各个区域依次经过测距仪4的下方,测距仪4对被切割物10的尺寸和厚度进行测量,同时测距仪4对被切割物10的四个边角的横向距离和纵向距离进行记录。
26.接着传送钢带3将被切割物10的中部传送至激光切割枪体7的下方,电动转轴21控制传送钢带3停止工作,随后第一电动推杆82的伸缩端推动集成板8向上升起,集成板8带动第一滑块81沿安装架2向上移动,同时集成板8带动锯齿条9和锯齿块91向上升起,使锯齿块91的上侧穿过传送钢带3的条形槽31,锯齿块91将被切割物10从传送钢带3表面向上撑起,
由于锯齿块91的横向位置和纵向位置固定不变,因此在被切割物10经过测距仪4时,测距仪4对被切割物10的总长度进行测量,并计算传送钢带3的传送距离,精确的完成对被切割物10的自动定位工作。
27.在完成被切割物10的自动定位工作之后,被切割物10两侧的两个定位单元中的第二电动滑块101沿导轨5,同时带动其所连接的卡设组件向被切割物10方向靠拢,同时第三电动滑块105沿电动导轨104,带动机械夹106及其所连接的卡设组件向被切割物10方向靠拢,使四个卡板207两两分别位于被切割物10的前侧和后侧,之后第二电动滑块101停止工作,第三电动滑块105继续沿电动导轨104移动,使位于前侧的两个卡板207与位于后侧的两个卡板207相向靠拢,四个卡板207在沿电动导轨104靠向被切割物10过程中,四个卡板207的竖直结构同时贴近切割物10,并在前后相互靠拢的基础上,分别对被切割物10的左侧和右侧进行摆正,完成被切割物10的摆正处理,实现将一个未知摆放状态的被切割物10自动正位呈平直状态并配合夹紧,无需人工校正,降低人工操作的难度及工作量。
28.被切割物10被摆正后,第三电动滑块105停止工作,四个卡板207的竖板部位两两分别紧贴被切割物10的前侧和后侧,随后控制第二电动推杆103带动第二滑块102沿第二电动滑块101向下移动,第二滑块102带动第三电动滑块105、机械夹106及其所连接的卡设组件向下移动,在四个卡板207的顶部结构分别紧贴被切割物10上表面的前侧和后侧之后,第三电动滑块105带动机械夹106向被切割物10方向继续靠拢,此时卡板207的竖板部位和顶板部位均紧贴被切割物10,因此卡板207受到被切割物10的阻挡,第三电动滑块105带动机械夹106推动连接杆201,连接杆201推动锁块202,带动伸缩杆203和第一弹簧205向固定块204方向收缩,同时第二电动推杆103继续带动第二滑块102、第三电动滑块105和机械夹106向下移动,机械夹106推动连接杆201,连接杆201推动锁块202、伸缩杆203、第一弹簧205和固定块204,带动伸缩臂206和第二弹簧208沿卡板207向下拉伸,实现机械夹106带动连接杆201和锁块202沿锯齿块91的侧斜面倾斜向下移动,直到锁块202与锯齿块91的第一卡槽911相对齐,之后第二电动推杆103停止移动,第三电动滑块105带动机械夹106和连接杆201反向移动,使连接杆201带动锁块202卡入锯齿块91的第一卡槽911中,同时锯齿块91的第一卡槽911部位也卡入锁块202的第三卡槽2021中,如图13所示,完成对被切割物10的锁紧工作,由于固定块204与锁块202之间是通过伸缩杆203和第一弹簧205连接,那么固定块204与锁块202是存在一个可控制的活动空间,即使被切割物10的尺寸不匹配多排锯齿块91的距离数值,此时通过固定块204与锁块202之间的可控制活动空间就可以补偿被切割物10的尺寸与多排锯齿块91距离数值的差值,实现对不同尺寸被切割物10的自动适配。
29.之后机械夹106将连接杆201松开,并且控制第二电动推杆103带动机械夹106向上离开卡设组件,同时第二电动滑块101沿导轨5反向移动,带动定位单元远离被切割物10,如图12所示,此时被切割物10的四个边角分别被四个卡设组件锁定在锯齿块91上,最后第一电动滑块61、第一气缸62和滑动机构63,分别控制激光切割枪体7进行横向位移、纵向位移和竖向位移,激光切割枪体7对被切割物10进行激光切割工作,在此过程中将被切割物10稳定的固定在锯齿块91上,防止被切割物10在切割过程中出现抖动,并且使用的卡板207体积和高度均较小,在保证快速对被切割物10产生稳定的固定效果同时,不影响激光切割枪体7的有效活动范围。
30.尽管已经示出和描述了本发明的实施例,但对于本领域的普通技术人员而言,可
以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行变化,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1