一种封头自动切割冲压工作站的制作方法
1.本发明涉及特种车辆罐体封头生产领域,具体涉及一种封头自动切割冲压工作站。
背景技术:
2.在国内特种车辆罐体封头生产领域,生产效率、质量水平等方面比较低下,主要表现在:1、上料、转运和下料等物流方式由人工半自动实现;2、板材表面涂油工序由人工完成;3、切割过程中产生的废料由人工搬运收集,存在安全隐患和降低生产效率;4、拉伸成型效果和切割质量一致性较差,生产效率低下和质量水平不高,尤其是封头凹口平面度和长短轴尺寸的一致性差,导致后续工序的封头与筒体自动组对焊接工艺无法自动实现;5、属于半自动设备,无法全自动实现搬运、拉伸成型和切割等全部生产工艺。
技术实现要素:
3.本发明的目的在于提供一种封头自动切割冲压工作站,可实现封头的自动上料、自动预定位、自动搬运、自动涂油、自动拉伸成型、自动切割、自动码垛等全部生产工艺,满足不同外形尺寸、不同切割工艺等封头或防波板的生产需求,提高特种车辆罐体封头行业的自动化水平和产品质量。
4.实现本发明目的的技术方案为:一种封头自动切割冲压工作站,包括搬运机器人系统、机器人轨道、原材料工位、预定位工位、切割机器人系统、一次切割工位、自动涂油工位、冲压设备系统、一次切割废料工位、二次切割工位、板链输送线、成品料架、废料框和控制柜;
5.搬运机器人系统在机器人轨道上运行,实现原材料板材、一次切割半成品、一次切割废料、冲压后半成品封头、成品封头等物料在不同设备或工位之间自动转运;
6.所述原材料工位为工作站的进料口,用于放置原材料板材;
7.所述预定位工位用于实现搬运机器人系统每次抓取原材料板材的位置一致性;
8.自动涂油工位实现对一次切割半成品表面自动涂油,冲压设备系统采用内装模具将一次切割半成品拉伸成型为半成品封头,
9.所述切割机器人系统分别运作于一次切割工位和二次切割工位之间,切割机器人系统实现原材料板材和半成品封头的全自动切割;所述切割机器人系统对一次切割工位的原材料板材切割得到一次切割半成品和一次切割废料,所述割机器人系统对二次切割工位的半成品封头自动切割为成品封头和翻边废料;
10.所述冲压设备系统用于对涂油的一次切割半成品拉伸成型为半成品封头;
11.所述板链输送线自动将半成品封头切割后的翻边废料输送至废料框内,所述成品料架用于放置成品封头,控制柜控制上述设备按照生产工艺有序执行。
12.本发明与现有技术相比,其显著效果为:
13.(1)本发明封头生产工艺过程中所有物料的上料、转运、下料等均不需要人工参
与,实现了整个工作站的全自动物流;
14.(2)本发明的一次切割半成品在拉伸成型前的表面涂油工序由自动涂油设备全自动实现;
15.(3)本发明采用原材料板材预定位、搬运机器人系统自动搬运、冲压设备系统自动拉伸成型和切割机器人系统自动切割等自动化设备,确保成品封头外形尺寸和切割质量的一致性,提高客户产品质量和生产效率,封头凹口平面度和长短轴尺寸的一致性可满足后续工序的封头与筒体机器人自动组对焊接工艺;
16.(4)本发明自动化水平较高,整个封头生产过程无需人工参与即可实现。
17.下面结合附图对本发明做进一步说明。
附图说明
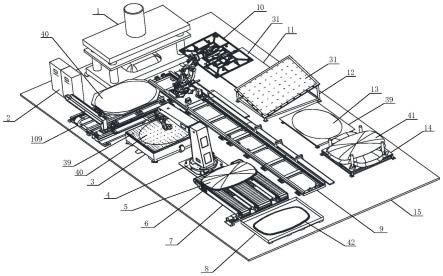
18.图1为封头自动切割冲压工作站的三维结构示意图。
19.图2为原材料工位的三维结构示意图。
20.图3为搬运机器人系统和机器人轨道的三维结构示意图。
21.图4为吸盘组件的三维结构示意图。
22.图5为吸盘组件的正视图。
23.图6为带原材料板材预定位工位的三维结构示意图。
24.图7为不带原材料板材预定位工位的三维结构示意图。
25.图8为切割机器人系统的三维结构示意图。
26.图9为一次切割工位的三维结构示意图。
27.图10为一次切割工位(去除支撑柱和支撑板)的三维结构示意图。
28.图11为粉尘托盘的三维结构示意图。
29.图12为自动涂油工位的三维结构示意图。
30.图13为自动涂油工位(去除涂油平台)的三维结构示意图。
31.图14为涂油平台的三维结构示意图。
32.图15为一次切割废料工位的三维结构示意图。
33.图16为冲压设备系统的三维结构示意图。
34.图17为不带半成品封头的二次切割工位的三维结构示意图。
35.图18为带半成品封头的二次切割工位的三维结构示意图。
36.图19为成品料架的三维结构示意图。
37.图20为成品料架的仰视图。
38.图21为板链输送线的三维结构示意图。
39.图22为废料框的三维结构示意图。
40.图23为半成品封头的分解图。
具体实施方式
41.下面将结合附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发
明保护的范围。
42.在本技术的描述中,需要说明的是,“上”、“下”、“前”、“后”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变。
43.结合图1,一种封头自动切割冲压工作站,包括搬运机器人系统10、机器人轨道9、原材料工位11、预定位工位12、切割机器人系统4、一次切割工位3、自动涂油工位109、冲压设备系统1、一次切割废料工位13、二次切割工位6、板链输送线7、成品料架14、废料框8和控制柜2。搬运机器人系统10在机器人轨道上9运行,实现原材料板材31、一次切割半成品40、一次切割废料39、冲压后半成品封头5、成品封头41等物料在不同设备或工位之间自动转运,自动涂油工位109实现对一次切割半成品40表面自动涂油,冲压设备系统1采用内装模具将一次切割半成品40拉伸成型成半成品封头5,切割机器人系统4实现原材料板材31和半成品封头5的全自动切割,板链输送线7自动将半成品封头5切割后的翻边废料42输送至废料框8内,控制柜2控制上述设备按照生产工艺顺序有序执行。
44.结合图2,原材料工位11包括原材料托盘33和原材料定位块32。原材料托盘33作为工作站的进料口,用于放置原材料板材31,配置叉车孔位34便于缺料后的人工更换,原材料定位块32可实现原材料托盘33在地面上多次取放后的位置限位,确保搬运机器人系统10抓取原材料板材31的位置一致性。
45.结合图3、图4和图5,搬运机器人系统10包括搬运机器人23和吸盘组件24,搬运机器人23通过机器人轨道9上的滑板和驱动机构实现外部第七轴的联动运行,吸盘组件24的吸盘框架26通过安装板25安装在搬运机器人23末端,吸盘组件24以虚线27为分界线,可独立控制内侧区域吸盘28和外侧区域吸盘30,内侧区域吸盘28包括若干小吸盘22和若干大吸盘101,外侧区域吸盘30包括若干小吸盘102。当搬运机器人系统10从原材料工位11搬运原材料板材31至预定位工位12及从预定位工位12搬运原材料板材31至一次切割工位3时,内侧区域吸盘28和外侧区域吸盘30同时进行吸附抓取,当搬运机器人系统10从一次切割工位3搬运一次切割半成品40至自动涂油工位109及从自动涂油工位109搬运一次切割半成品40至冲压设备系统1时,仅内侧区域吸盘28进行吸附抓取,当搬运机器人系统10从一次切割工位3搬运一次切割废料39至一次切割废料工位13时,仅外侧区域吸盘30进行吸附抓取,当搬运机器人系统10从冲压设备系统1中搬运半成品封头5至二次切割工位6及从二次切割工位6搬运成品封头41到成品料架14时,内侧区域吸盘28中若干大吸盘101进行吸附。当原材料板材、封头等外形尺寸发生变化时,内侧区域吸盘28和外侧区域吸盘30的吸盘安装位置可在吸盘框架26的若干安装梁103上自由滑动调节,可适应尺寸、外形等变化范围内产品的抓取需求。
46.结合图6、图7,预定位工位12包括预定位框架35、顶板36、万向轴承组合104、x向导向轴承组合37和y向导向轴承组合38。顶板36安装在预定位框架35上方,万向轴承组合104由若干万向轴承组成并安装在顶板36上,x向导向轴承组合37由若干导向轴承组成并在顶板36上,y向导向轴承组合38由若干导向轴承组成并在顶板36上。所述预定位框架35在x方向和y方向倾斜,当原材料板材31搬运至本工位后,原材料板材31由自身重力的x向重力分力和y向重力分力驱动下,利用万向轴承组合104、x向导向轴承组合37和y向导向轴承组合38的滑动导向作用,原材料板材31的直角点自动定位到固定位置105,固定位置105为x向导向轴承组合37和y向导向轴承组合38的垂直交叉点,即最低点,可实现搬运机器人系统10每
次抓取原材料板材31的位置一致性。
47.结合图8,切割机器人系统4包括切割机器人底座21、旋转驱动机构20、立柱16、悬臂17、切割机器人19和切割头18。旋转驱动机构20和立柱16安装在切割机器人底座21上,切割头18安装在切割机器人19末端,切割机器人19安装在悬臂17下方,悬臂17固定安装在立柱16上。切割头18采用激光切割方式,自带电容传感器检测切割头18激光输出端与工件距离,并自动伸缩跟随工件外形尺寸变化保持最佳切割距离和最佳切割效果,当切割头18与工件碰撞时,控制柜2具有自动切断激光输出的保护功能并报警提示。切割机器人19驱动切割头18可实现生产过程中将原材料板材31切割成一次切割半成品40的平面尺寸、将半成品封头5切割成成品封头41的平面尺寸、将成品封头41切割成异形孔的空间尺寸等切割作业工艺需求,切割机器人19和切割头18在旋转驱动机构20作用下,切割范围可兼顾一次切割工位3和二次切割工位6,从而实现单切割系统双切割工位的工作模式,根据控制柜2不同任务控制指令,交替对原材料板材31和半成品封头5进行切割。
48.结合图9、图10和图11,一次切割工位3包括一次切割框架46、支撑板44、支撑柱45和粉尘托盘47。支撑柱45通过支撑板44安装在一次切割框架46上,实现原材料板材31的机械支撑。粉尘托盘47包括把手50、收集盒51和定向轮52,定向轮52安装在收集盒51底部,把手50安装在收集盒51一侧,当收集盒51内切割粉尘载满需要清理时,人工拉动把手50把粉尘托盘47拖出。一次切割框架46配置了粉尘内吸口48和粉尘外吸口49,所有粉尘内吸口48汇集后均与粉尘外吸口49连接,当原材料板材31放置到支撑柱45上方后,原材料板材31、一次切割框架46和粉尘托盘47形成密闭的腔体,利用车间除尘系统连接粉尘外吸口49实现切割过程中产生烟尘的自动收集清理。
49.结合图12、图13和图14,自动涂油工位109包括喷嘴x向驱动轨道110、喷嘴y向运动机构112、喷嘴z向机构129、平台x向运动机构111和涂油平台113。喷嘴x向驱动轨道110包括喷嘴x向轨道116、喷嘴x向滑板114和喷嘴x向驱动机构115,喷嘴y向运动机构112包括喷嘴y向轨道121、喷嘴y向滑板120和喷嘴y向驱动机构119,喷嘴z向机构129包括喷嘴117和支架118,喷嘴y向运动机构112安装在喷嘴x向滑板114上可实现x1方向自由运动,喷嘴z向机构129安装在喷嘴y向滑板120上可实现y1方向自由运动,喷嘴117安装在支架118上,通过调节支架118在喷嘴y向滑板120上安装位置可手动调节喷嘴117高度。平台x向运动机构111包括平台x向轨道122、平台x向滑板124和平台x向驱动机构123,涂油平台113包括涂油框架128、涂油顶板127、涂油吸盘126和螺杆125,涂油平台113通过涂油框架128底部与平台x向滑板124连接实现x2方向自由运动,涂油吸盘126通过螺杆125安装在涂油框架128且上表面与涂油顶板127平齐,用于吸附固定一次切割半成品40。当搬运机器人系统10从一次切割工位3搬运一次切割半成品40至自动涂油工位109时,涂油吸盘126自动吸附固定,平台x向运动机构111将一次切割半成品40运送至指定喷油位置,喷嘴117在喷嘴x向驱动轨道110和喷嘴y向运动机构112的双向联动作用下,自动完成一次切割半成品40表面涂油。
50.结合图15,一次切割废料工位3包括一次切割废料托盘58和一次切割废料定位块56。一次切割废料托盘58用于收集由搬运机器人系统10转运过来的一次切割废料39,配置叉车孔位57便于收集满载后的人工更换,一次切割废料定位块56可实现一次切割废料托盘58在地面上多次取放后的位置限位,确保搬运机器人系统10放置一次切割废料39的位置一致性。
51.结合图16,冲压设备系统1包括压机设备53、上模具54和下模具55,上模具54和下模具55均安装在压机设备53内部。当搬运机器人系统10从自动涂油工位109搬运一次切割半成品40至下模具55上后,压机设备53提供拉伸成型动力源,一次切割半成品40在上模具54和下模具55共同作用下拉伸成型为半成品封头5。
52.结合图17、图18,二次切割工位6包括二次切割框架95、左升降定位机构107和右升降定位机构108。左升降定位机构107和右升降定位机构108均安装在二次切割框架95上。左升降定位机构107包括第一底座87、第一气缸升降机构、第一支撑定位柱68、第二支撑定位柱86、第一可调节吸附固定机构、第二可调节吸附固定机构、第一挡板65和第二挡板91,第一气缸升降机构包括第一气缸94、第一导向轴承63、第二导向轴承93、第一导向杆64和第二导向杆92,第一气缸94底部与二次切割框架95连接,第一气缸94的活塞杆与第一底座87连接,第一导向轴承63、第二导向轴承93均固定在二次切割框架95上,第一导向杆64和第二导向杆92上端与第一底座87连接,下端为自由端,分别与第一导向轴承63和第二导向轴承93连接,第一气缸94的活塞杆驱动第一底座87上下运动;第一支撑定位柱68和第二支撑定位柱86采用封头产品内部形状的仿形设计,确保与封头准确贴合定位并支撑;第一可调节吸附固定机构包括第一吸盘69、第一螺柱67和第一螺母66,第一吸盘69安装在第一螺柱67上,第一螺柱67与第一底座87上螺纹孔连接,第一螺母66用于锁紧第一螺柱67,当不同规格封头内部高度不同时,通过调节第一螺柱67实现第一吸盘69的高度调节,确保第一吸盘69可满足不同封头的吸附固定;同理,第二可调节吸附固定机构包括第二吸盘88、第二螺柱89和第二螺母90,第二吸盘88安装在第二螺柱89上,第二螺柱89与第一底座87上螺纹孔连接,第二螺母90用于锁紧第二螺柱89,当不同规格封头内部高度不同时,通过调节第二螺柱89实现第二吸盘88的高度调节,确保第二吸盘88可满足不同封头的吸附固定;第一挡板65和第二挡板91安装在第一底座87的外侧。
53.结合图17、图18,同左升降定位机构107,右升降定位机构108包括第二底座81、第二气缸升降机构、第三支撑定位柱74、第四支撑定位柱80、第三可调节吸附固定机构、第四可调节吸附固定机构、第三挡板73和第四挡板82,第二气缸升降机构包括第二气缸85、第三导向轴承70、第四导向轴承84、第三导向杆71和第四导向杆83,第二气缸85底部与二次切割框架95连接,第二气缸85的活塞杆与第二底座81连接,第三导向轴承70、第四导向轴承84均固定在二次切割框架95上,第三导向杆71和第四导向杆83上端与第二底座81连接,下端为自由端,第二气缸85的活塞杆驱动第二底座81上下运动;第三支撑定位柱74和第四支撑定位柱80采用封头产品内部形状的仿形设计,确保与封头准确贴合定位并支撑;第三可调节吸附固定机构包括第三吸盘76、第三螺柱72和第三螺母75,第三吸盘76安装在第三螺柱72上,第三螺柱72与第二底座81上螺纹孔连接,第三螺母75用于锁紧第三螺柱72,当不同规格封头内部高度不同时,通过调节第三螺柱72实现第三吸盘76的高度调节,确保第三吸盘76可满足不同封头的吸附固定;同理,第四可调节吸附固定机构包括第四吸盘78、第四螺柱79和第四螺母77,第四吸盘78安装在第四螺柱79上,第四螺柱79与第二底座81上螺纹孔连接,第四螺母77用于锁紧第四螺柱79,当不同规格封头内部高度不同时,通过调节第四螺柱79实现第四吸盘78的高度调节,确保第四吸盘78可满足不同封头的吸附固定。
54.结合图17、图18,当搬运机器人系统10从冲压设备系统1中搬运半成品封头5至二次切割工位6时,左升降定位机构107和右升降定位机构108自动升起,第一支撑定位柱68、
第二支撑定位柱86、第三支撑定位柱74和第四支撑定位柱80一起支撑定位半成品封头5,第一可调节吸附固定机构、第二可调节吸附固定机构、第三可调节吸附固定机构和第四可调节吸附固定机构均吸附固定半成品封头5,实现半成品封头5切割前的定位紧固。
55.结合图17、图18,当切割机器人系统4完成成品切割后,半成品封头5被分解成产品封头41和翻边废料42,搬运机器人系统10自动从二次切割工位6搬运成品封头41至成品料架14,左升降定位机构107和右升降定位机构108自动下降至板链输送线7的传输面下方,翻边废料42由原来第一挡板65、第二挡板91、第三挡板73和第四挡板82支撑变成板链输送线7上表面支撑,同时避让翻边废料42在板链输送线7上的传输路径。
56.结合图19、图20,成品料架14包括成品框架60、限位柱59和限位块61。限位柱59安装在成品框架60上,可实现成品封头41码垛的机械限位,利用成品框架60表面长圆孔62进行自由调节,可适应不同外形尺寸的成品封头41。配置叉车孔位106便于收集满载后的人工更换,定位块61可实现成品框架60在地面上多次取放位置的限位,确保搬运机器人系统10放置成品封头41的位置一致性。
57.结合图21,板链输送线7包括板链底座99、驱动机构100、第一板料机构96、第二板料机构97和第三板料机构98,第一板料机构96、第二板料机构97和第三板料机构98的一端固定在板链底座99上,另一端固定在二次切割工位6的二次切割框架95上。驱动机构100安装在板链底座99上,第一板料机构96、第二板料机构97和第三板料机构98同步传输将半成品封头5切割后的翻边废料42输送至废料框8内。
58.当切割机器人系统4切割防波板或其它异形空间曲面构件类似封头,在成品封头表面切割若干异形孔演化而成时,本工作站同样适用全部生产工艺。防波板或其它异形空间曲面构件切割完成后,板链输送线7的第一板料机构96、第二板料机构97和第三板料机构98同步传输将防波板切割过程中产生的异形孔废料输送至废料框8内。
59.结合图22,废料框8用于收集翻边废料42,自带叉车孔位43便于更换搬运。
60.结合图24,基本工艺流程如下:
61.第一步,取料,搬运机器人系统10从原材料工位11抓取原材料板材31;
62.第二步,板材预定位,搬运机器人系统10搬运至预定位工位12进行原材料板材31预定位;
63.第三步,上料,搬运机器人系统10将预定位后的原材料板材31搬运至一次切割工位3;
64.第四步,一次切割,切割机器人系统4进行原材料板材31裁边工作,得到一次切割半成品40;
65.第五步,自动涂油,当搬运机器人系统10从一次切割工位3搬运一次切割半成品40至自动涂油工位109并自动表面涂油;
66.第六步,一次切割废料收集,搬运机器人系统10将一次切割废料39搬运至一次切割废料工位13;
67.第七步,一次搬运,从自动涂油工位109搬运一次切割半成品40至冲压设备系统1;
68.第八步,拉伸成型,冲压设备系统1将一次切割半成品40拉伸成型为半成品封头5;
69.第九步,二次搬运,搬运机器人系统10将成型后的半成品封头5搬运至二次切割工位6;
70.第十步,二次切割,切割机器人系统4将半成品封头5切割为成产品封头41和翻边废料42;
71.第十一步,成品下料,搬运机器人系统10将切割后的封头成品41搬运至成品料架14并码垛;
72.第十二步,翻边废料收集,板链输送线7将半成品封头5切割后的翻边废料42输送至废料框8内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1