一种布料激光裁剪系统的制作方法
1.本发明涉及激光裁剪技术领域,具体涉及一种布料激光裁剪系统。
背景技术:
2.激光裁剪是将从激光器发射出的激光,经光路系统,聚焦成高功率密度的激光束,激光束照射到工件表面,使工件达到熔点或沸点,同时与光束同轴的高压气体将熔化或气化金属吹走,随着光束与工件相对位置的移动,最终使材料形成切缝,从而达到裁剪的目的。
3.目前市场上的自动裁剪机,通常都是按照预先设置的裁剪路径对铺开来的布料进行裁剪,预先设置的裁剪路径设置时需要采集目标图像,实际生产时大都使用工业相机采集目标图像,工业相机对目标图像采集后,获取到的是24位真彩色图像。彩色图像不但占用了字节空间大,而且过多的数据会增加裁剪路径生成的难度。
4.中国专利“cn104818603b”公开了一种智能裁剪方法及系统。本发明中的智能裁剪方法用于裁剪条纹或格子布料,该智能裁剪方法应用于具有裁剪区域的智能裁剪系统,所述智能裁剪系统根据该智能裁剪系统内部储存的路径选择规则选择所述条纹或格子图形中的一条图形线条作为裁剪路径,避免了裁剪下来的布料出现条纹或格子错位,保证了该布料制作的产品外观的美观。
5.上述专利虽然能避免裁剪下来的布料出现条纹或格子错位,但是并没有对识别的目标图像进行处理,获得的图像包含了大量的冗余像素,可能会致使生成的裁剪路径出现偏差,也会降低裁剪效率。
技术实现要素:
6.本发明的目的在于提供一种布料激光裁剪系统,解决上述提到的问题。
7.本发明的目的可以通过以下技术方案实现:
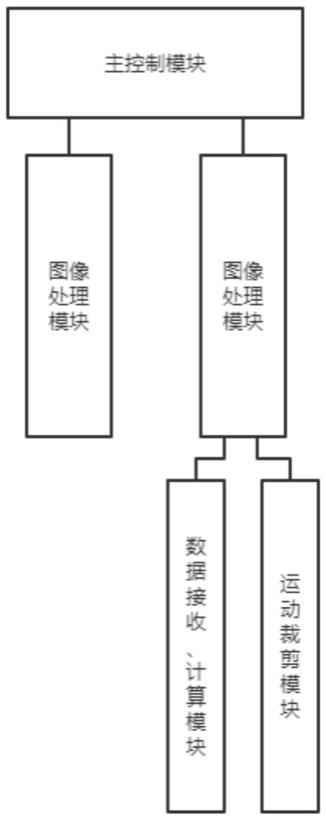
8.一种布料激光裁剪系统,包括:主控制模块、图像处理模块和运动控制模块;
9.主控制模块:与图像处理模块和运动控制模块连接,用于和图像处理模块、运动控制模块之间通讯,完成激光裁剪;
10.图像处理模块:与主控制模块连接,用于对图像的提取和处理;
11.运动控制模块:与主控制模块连接,包括数据接收、计算模块和运动裁剪模块;
12.数据接收、计算模块:用于接收处理后的加工图像,并根据图像参数自动转换成加工程序;
13.运动裁剪模块:对加工程序进行编译识别,按照加工程序的要求,生成相应的控制信号,根据控制信号控制步进电机和激光切割器工作。
14.作为本发明方案的进一步描述,所述激光裁剪系统的工作方式包括如下步骤:
15.步骤1、使用工业相机采集需要加工的图像;
16.步骤2、利用图像处理模块对图像进行处理;
17.步骤3、根据处理后的图像利用数据接收、计算模块自动转换成加工程序;
18.步骤4、通过运动裁剪模块将加工程序生成相应的控制信号;
19.步骤5、通过pci总线,将控制信号传递至控制卡接口,控制卡根据传递的控制信号,控制步进电机和激光切割器工作。
20.通过上述技术方案,由主控制模块完成各个模块之间的通讯,由图像处理模块对要裁剪的图像进行提取和处理,由运动控制模块根据处理后的加工图像生成加工程序,然后通过加工程序生成相应的控制信号,根据控制信号控制步进电机和激光切割器工作。
21.作为本发明方案的进一步描述,所述图像处理模块进行图像处理时包括如下步骤:
22.步骤2.1、目标图像灰度化处理,将目标图像转换为灰度图像;
23.步骤2.2、目标图像二值化处理,将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的黑白效果的过程;
24.步骤2.3、对目标图像进行提取、拟合。
25.作为本发明方案的进一步描述,对目标图像进行提取方法为:
26.首先系统地扫描图像来获取连通域,然后,以起点像素作为轮廓的第一个像素点,沿着起点像素对轮廓的边界像素进行记录,然后,当前轮廓被提取完毕后,就继续扫描下一个连通域,继续提取轮廓,返回执行之后就可以将整个图案的轮廓提取出来最后,当提取工作结束,可以借助利用图像轮廓筛选,比对轮廓的大小即可获取图案最外层的轮廓。
27.作为本发明方案的进一步描述,对目标图像进行拟合方法为:
28.提取到的轮廓为若干的像素点依次、紧密相连组成的曲线,首先对边界轮廓曲线上的像素点逐个进行计算它们的权值,对每个权值与预先设定的弦高值进行比较,如果大于设定的弦高值,表示像素贡献度大需要保留,否则像素为冗余像素,直接删除,拟合后的轮廓曲线由离散的、贡献度大的像素点构成。
29.通过上述技术方案,分别进行了图像的灰度化、二值化处理,然后对二值化图进行轮廓的提取和拟合,对轮廓的数据信息进行了消除,以离散的点进行轮廓曲线的描述,极大的减少了数据量,提升了后续的数控切割效率。
30.作为本发明方案的进一步描述,所述控制步进电机工的方法为:
31.首先,是根据加工的轮廓速度f和插补周期t,计算得到轮廓步长δl:
[0032][0033]
然后,根据终点坐标和起始坐标求出夹角α;
[0034]
然后,求出一个插补周期内在x和y方向上的进给量δx、δy;
[0035]
最后,计算得到x和y方向上需要的步数n。
[0036]
作为本发明方案的进一步描述,所述进给量δx、δy的计算方法为:
[0037]
假设需要切割切割直线oe,起点为o,终点为e(xe,ye),α为线段oe与x轴的夹角,由此可得:
[0038][0039]
通过步长δl可得:
[0040]
δx=δlcosα,δy=δlsinα。
[0041]
作为本发明方案的进一步描述,x和y方向上需要的步数n的计算方法为:
[0042]
利用e点坐标和坐标原点o来表示α角:经过换算得因此,
[0043]
设x和y轴上电机步长依次为xs、ys,x方向上需要的步数n的计算方法为:方向上需要的步数n的计算方法为:
[0044]
通过上述技术方案,可以获得x和y方向上需要的电机步数n,帮助x,y方向的电机进行协调进给,可以提高系统切割的效率也能帮助精度的提升。
[0045]
有益效果:1、本发明对目标图像分别进行了图像的灰度化、二值化处理,然后对二值化图进行轮廓的提取和拟合,对轮廓的数据信息进行了消除,以离散的点进行轮廓曲线的描述,极大的减少了数据量,提高了裁剪路径生成速度,提升了后续的数控切割效率。
[0046]
2、本发明通过对步进电机在x和y方向上需要的电机步数n的计算,帮助x,y方向的电机进行协调进给,防止电机出现失步,可以提高系统切割的效率也能帮助精度的提升。
附图说明
[0047]
下面结合附图对本发明作进一步的说明。
[0048]
图1为本发明系统结构示意图。
具体实施方式
[0049]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0050]
请参阅图1所示,本发明为一种布料激光裁剪系统,包括:主控制模块、图像处理模块和运动控制模块;
[0051]
主控制模块:与图像处理模块和运动控制模块连接,用于和图像处理模块、运动控制模块之间通讯,完成激光裁剪;
[0052]
图像处理模块:与主控制模块连接,用于对图像的提取和处理;
[0053]
运动控制模块:与主控制模块连接,包括数据接收、计算模块和运动裁剪模块;
[0054]
数据接收、计算模块:用于接收处理后的加工图像,并根据图像参数自动转换成加工程序;
[0055]
运动裁剪模块:对加工程序进行编译识别,按照加工程序的要求,生成相应的控制信号,根据控制信号控制步进电机和激光切割器工作。
[0056]
所述激光裁剪系统的工作方式包括如下步骤:
[0057]
步骤1、使用工业相机采集需要加工的图像;
[0058]
步骤2、利用图像处理模块对图像进行处理;
[0059]
所述图像处理模块进行图像处理时包括如下步骤:
[0060]
步骤2.1、目标图像灰度化处理,将目标图像转换为灰度图像;
[0061]
图像的灰度化操作是数字图像中一个必不可少的处理环节,灰度图像能够避免可见的条带失真,并且非常易于编程。
[0062]
步骤2.2、目标图像二值化处理,将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的黑白效果的过程;
[0063]
图像的二值化使图像中数据量大为减少,从而能凸显出目标图像的轮廓。
[0064]
步骤2.3、对目标图像进行提取、拟合。
[0065]
对目标图像进行提取方法为:
[0066]
首先系统地扫描图像来获取连通域,然后,以起点像素作为轮廓的第一个像素点,沿着起点像素对轮廓的边界像素进行记录,然后,当前轮廓被提取完毕后,就继续扫描下一个连通域,继续提取轮廓,返回执行之后就可以将整个图案的轮廓提取出来,最后,当提取工作结束,可以借助利用图像轮廓筛选,比对轮廓的大小即可获取图案最外层的轮廓。
[0067]
对目标图像进行拟合方法为:
[0068]
提取到的轮廓为若干的像素点依次、紧密相连组成的曲线,首先对边界轮廓曲线上的像素点逐个进行计算它们的权值,对每个权值与预先设定的弦高值进行比较,如果大于设定的弦高值,表示像素贡献度大需要保留,否则像素为冗余像素,直接删除,拟合后的轮廓曲线由离散的、贡献度大的像素点构成。
[0069]
步骤3、根据处理后的图像利用数据接收、计算模块自动转换成加工程序;
[0070]
步骤4、通过运动裁剪模块将加工程序生成相应的控制信号;
[0071]
步骤5、通过pci总线,将控制信号传递至控制卡接口,控制卡根据传递的控制信号,控制步进电机和激光切割器工作。
[0072]
所述控制步进电机工的方法为:
[0073]
首先,是根据加工的轮廓速度f和插补周期t,计算得到轮廓步长δl:
[0074][0075]
然后,根据终点坐标和起始坐标求出夹角α;
[0076]
然后,求出一个插补周期内在x和y方向上的进给量δx、δy;
[0077]
所述进给量δx、δy的计算方法为:
[0078]
假设需要切割切割直线oe,起点为o,终点为e(xe,ye),α为线段oe与x轴的夹角,由此可得:
[0079][0080]
通过步长δl可得:
[0081]
δx=δlcosα,δy=δlsinα。
[0082]
最后,计算得到x和y方向上需要的步数n。
[0083]
利用e点坐标和坐标原点o来表示α角:经过换算得
因此,
[0084]
设x和y轴上电机步长依次为xs、ys,x方向上需要的步数n的计算方法为:x方向上需要的步数n的计算方法为:
[0085]
以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1