手推车篮筐生产组件的制作方法
1.本发明涉及手推车生产技术领域,尤其涉及一种手推车篮筐生产组件。
背景技术:
2.在现有技术中,对于手推车篮筐的生产,需要人工将弯折后的弯折筐体放置到气保焊机上实施焊接,然而,弯折筐体的开放接口在气保焊机焊接后有一定几率会出现错位,某些情况下错位程度较低,生产人员难以发现,导致焊接后的弯折筐体在放入网格底板时会出现网格底板与焊接后的弯折筐体连接不够紧密,致使手推筐框的良品率低。为了解决这一问题,目前的方案是在焊接工位后增加人工质检工位,人工质检不仅效率低下,且耗费大量人力,导致产品生产成本高,不利于产品的市场竞争力。
技术实现要素:
3.为了克服现有技术的不足,本发明的目的在于提供一种手推车篮筐生产组件,以解决目前手推车筐体焊接容易出现错位现象的问题。
4.本发明的目的采用如下技术方案实现:
5.一种手推车篮筐生产组件,包括依次排布的定位机构、第一焊接机构、第二焊接机构、冲压机构和放网机构;
6.所述定位机构包括第一输送带以及位于所述第一输送带的端部的定位凹槽,所述定位凹槽的开口方向与所述第一输送带的输送方向相反;
7.所述第一焊接机构包括相对设置的第一上料机械手和第一焊接装置,所述第一焊接装置与定位凹槽相邻设置,所述第一焊接装置上设有至少一个点焊头,所述点焊头沿竖直方向可滑动地连接于所述第一焊接装置;
8.所述第二焊接机构包括相对设置的第二上料机械手和第二焊接装置,所述第二焊接装置和第一焊接装置相邻设置,所述第二焊接装置上设有视觉识别部件、焊接头和焊接驱动部件,所述焊接头通过所述焊接驱动部件可活动地连接于所述第二焊接装置,所述视觉识别部件位于所述焊接头和第二上料机械手之间;
9.所述冲压机构包括相对设置的第三上料机械手和冲压装置,所述冲压装置和第二焊接装置相邻设置;
10.所述放网机构包括第二输送带和放网机械手,所述第二输送带的一端位于所述冲压装置的出料侧,所述放网机械手位于所述第二输送带的侧边,所述放网机械手的自由端设有用于抓取网格底板的拾取装置。
11.在某些可选地实施例中,还包括设于所述冲压机构和放网机构之间的翻料机构;
12.所述翻料机构包括第三输送带以及位于所述第三输送带的一端的翻料装置,所述第三输送带的另一端与所述冲压装置相邻设置,所述第二输送带的一端与翻料装置相连接;所述翻料装置包括基座以及与所述基座转动连接的翻转部件,所述翻转部件上活动地设有两个相对设置的翻转夹持件,以使两个所述翻转夹持件相向运动或相背运动,两个所
述翻转夹持件之间设有收容空间。
13.在某些可选地实施例中,还包括与所述放网机械手相邻设置的供网机构;
14.所述供网机构包括供网机架和拾网装置,所述供网机架上设有网格定位板以及至少一个储网单元,所述拾网装置包括拾网部件和拾网驱动部件,所述拾网部件通过所述拾网驱动部件活动地连接于所述供网机架,所述拾网装置用于将储网单元上的网格底板输送至所述网格定位板。
15.在某些可选地实施例中,所述第一输送带的一端设有定位装置,所述定位装置包括定位座、限位块以及两个相对设置的定位块,所述限位块固定连接于所述定位座,两个所述定位块可滑动地连接于所述定位座以使两个所述定位块能相向运动或相背运动,所述限位块和两个定位块形成所述定位凹槽。
16.在某些可选地实施例中,所述第一焊接装置上还设有焊接夹持部件,所述焊接夹持部件包括两个相对设置且均可滑动地连接于所述第一焊接装置的焊接夹持块,所述点焊头位于两个所述焊接夹持块之间。
17.在某些可选地实施例中,所述焊接驱动部件包括用于在第一方向上驱动所述焊接头和第二焊接装置相对运动的第一驱动部、用于在第二方向上驱动所述焊接头和第二焊接装置相对运动的第二驱动部以及用于在第三方向上驱动所述焊接头和第二焊接装置相对运动的第三驱动部,所述第一方向、第二方向和第三方向两两相垂直设置。
18.在某些可选地实施例中,所述冲压机构还包括位于所述冲压装置和第二焊接装置之间的推料装置,所述推料装置上设有推料台以及可滑动地连接于所述推料台的推料部件,所述推料部件可靠近或远离所述冲压装置运动。
19.在某些可选地实施例中,所述拾取装置上设有多个吸料部件,所述吸料部件能够产生负压以吸附所述网格底板。
20.在某些可选地实施例中,所述供网机架上设有至少一个网格定位装置,所述网格定位装置包括固定连接于所述供网机架的网格限位块以及可滑动地连接于所述供网机架的网格定位块,所述网格限位块和网格定位块分别位于所述网格定位板的两侧。
21.在某些可选地实施例中,所述放网机构还包括放网定位装置,所述放网定位装置包括放网机架、放网夹持部件和阻拦部件,所述放网夹持部件包括两个相对设置且均可滑动地连接于所述放网机架的放网夹持块,所述阻拦部件位于所述放网机构的出料侧,所述阻拦部件活动连接于所述放网机架,所述阻拦部件用于阻拦所述第二输送带上的工件。
22.相比现有技术,本发明的有益效果在于:
23.先由第一焊接机构进行点焊焊接,再由第二焊接机构上的视觉识别部件进行自动质检,质检合格的筐体才进行第二焊接装置的焊接,焊接后的筐体经冲压及放网,实现手推车框的自动化生产及质检。
附图说明
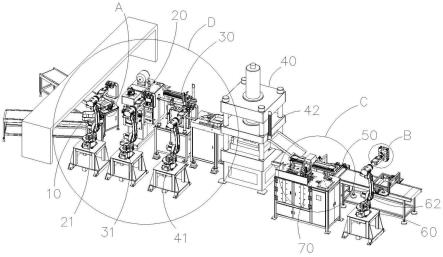
24.图1为发明的手推车篮筐生产组件的整体结构示意图;
25.图2为发明的手推车篮筐生产组件的定位机构示意图;
26.图3为图1中a处的放大示意图;
27.图4为发明的手推车篮筐生产组件的第一焊接机构的结构示意图;
28.图5为发明的手推车篮筐生产组件的第二焊接机构的结构示意图;
29.图6为发明的手推车篮筐生产组件的推料装置的结构示意图;
30.图7为发明的手推车篮筐生产组件的翻料装置的结构示意图;
31.图8为图1中b处的放大示意图;
32.图9为发明的手推车篮筐生产组件的放网机构的局部结构示意图;
33.图10为图1中c处的放大示意图;
34.图11为图1中d处的放大示意图;
35.图中:
36.1、弯折筐体;2、第一筐体;3、第二筐体;4、第三筐体;5、网格底板;10、定位机构;11、第一输送带;12、定位座;13、限位块;14、定位块;20、第一焊接机构;21、第一上料机械手;22、第一焊接装置;221、点焊头;222、焊接夹持部件;2221、焊接夹持块;30、第二焊接机构;31、第二上料机械手;32、第二焊接装置;321、视觉识别部件;322、焊接头;323、焊接驱动部件;3231、第一驱动部;3232、第二驱动部;3233、第三驱动部;40、冲压机构;41、第三上料机械手;42、冲压装置;43、推料装置;431、推料台;432、推料部件;50、翻转机构;51、第三输送带;52、基座;53、翻转部件;531、翻转夹持件;60、放网机构;61、第二输送带;62、放网机械手;621、拾取装置;6211、吸料部件;63、放网机架;64、放网夹持块;65、阻拦部件;70、供网机构;71、供网机架;711、网格定位板;712、储网单元;713、网格限位块;714、网格定位块;72、拾网部件;73、拾网驱动部件。
具体实施方式
37.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳的实施例。但是,本发明可以用许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
38.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
39.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
40.结合图1至图11所示,示意性地显示了本发明的手推车篮筐生产组件。
41.结合图1和图2所示,手推车篮筐生产组件包括依次排布的定位机构10、第一焊接机构20、第二焊接机构30、冲压机构40、翻料机构和放网机构60。
42.如图2和图3,定位机构10包括第一输送带11以及位于第一输送带11的端部的定位凹槽,定位凹槽的开口方向与第一输送带11的输送方向相反。第一输送带11用于输送折弯机折弯加工后的弯折筐体1,由于折弯机是现有设备,故此处不再赘述其加工过程。弯折筐体1在第一输送带11的输送下运动至定位凹槽内,定位凹槽能够对弯折筐体1的姿态进行限
制。
43.如图4,第一焊接机构20包括相对设置的第一上料机械手21和第一焊接装置22,第一焊接装置22与定位凹槽相邻设置,第一上料机械手21用于将定位凹槽内的弯折筐体1转移至第一焊接装置22上,第一焊接装置22上设有至少一个点焊头221,点焊头221沿竖直方向可滑动地连接于第一焊接装置22,点焊头221在第一焊接装置22上滑动,以靠近或远离位于第一焊接装置22上的弯折筐体1。点焊头221优选为电阻焊头,以用于对弯折筐体1实施点焊,具体为,弯折筐体1并非一封闭的环形框,而是具有一开口的,点焊头221对弯折筐体1的开口实施点焊,以临时固定弯折筐体1的开口。而且,由于点焊头221与弯折筐体1上的被焊接面相垂直,因此在点焊头221焊接的过程中,可避免弯折筐体1的开口错位。弯折筐体1在被点焊加工后形成第一筐体2。
44.如图5,第二焊接机构30包括相对设置的第二上料机械手31和第二焊接装置32,第二焊接装置32和第一焊接装置22相邻设置,第二上料机械手31用于将第一焊接装置22上的第一筐体2输送至第二焊接装置32。第二焊接装置32上设有视觉识别部件321、焊接头322和焊接驱动部件323,焊接头322通过焊接驱动部件323可活动地连接于第二焊接装置32,视觉识别部件321位于焊接头322和第二上料机械手31之间,第二上料机械手31首先将第一筐体2输送至视觉识别部件321下方以进行视觉识别,以检验点焊质量,尤其是检验弯折筐体1的开口是否错位。
45.在视觉识别质检的过程中,有质检合格与质检异常两种情况:(1)当第一筐体2质检合格时,第二上料机械手31将第一筐体2置于第二焊接装置32上,焊接驱动部件323驱动焊接头322运动,以通过焊接头322将第一筐体2上还未焊接连接的缝隙焊接上,使得第一筐体2转变成一封闭的环形结构,将其记为第二筐体3。(2)当第一筐体2质检异常时,第二上料机械手31将第一筐体2转移给下文中的第三上料机械手41,第三上料机械手41将该第一筐体2转移至第三上料机械手41侧边的废品储存容器内。
46.冲压机构40包括相对设置的第三上料机械手41和冲压装置42,冲压装置42和第二焊接装置32相邻设置,第三上料机械手41用于将第二筐体3从第二焊接装置32转移至冲压装置42,冲压装置42用于对第二筐体3进行冲压加工,以在第二筐体3上加工出预设的目标结构(如在第二筐体3上冲压出凹槽或凸筋),第二筐体3经冲压加工后形成第三筐体4。
47.结合图9和图11,放网机构60包括第二输送带61和放网机械手62,第二输送带61的一端位于冲压装置42的出料侧,放网机械手62位于第二输送带61的侧边,第二输送带61用于将第三筐体4输送至放网机械手62的侧边,放网机械手62的自由端设有用于抓取网格底板5的拾取装置621,放网机械手62用于将网格底板5放置在第三筐体4内,以使第三筐体4与网格底板5结合形成手推车篮筐。具体地,如图8,拾取装置621上设有多个吸料部件6211,吸料部件6211能够产生负压以吸附网格底板5,吸料部件6211优选为吸料气缸,其能产生负压以吸附网格底板5。
48.其中,如图7,翻料机构包括第三输送带51以及位于第三输送带51的一端的翻料装置,第三输送带51的另一端与冲压装置42相邻设置,第二输送带61的一端与翻料装置相连接,即翻料装置位于第二输送带61和第三输送带51之间,第三筐体4经冲压装置42加工后下落至第三输送带51,翻料装置用于将第三输送带51上的第三筐体4翻转180
°
并转移至第二输送带61。翻料装置包括基座52以及与基座52转动连接的翻转部件53,翻转部件53上活动
地设有两个相对设置的翻转夹持件531,以使两个翻转夹持件531相向运动或相背运动,两个翻转夹持件531之间设有收容空间。第三输送带51上的第三筐体4被输送至收容空间,两个翻转夹持件531相向运动,以夹持第三筐体4,翻转部件53即可相对基座52转动以翻转第三筐体4。翻转机构50翻转第三筐体4以适应第三筐体4的后续加工工序。
49.结合图10所示,本发明的手推车篮筐生产组件还包括与放网机械手62相邻设置的供网机构70,用于为放网机构60提供网格底板5。供网机构70包括供网机架71和拾网装置,供网机架71上设有网格定位板711以及至少一个储网单元712,网格定位板711用于临时放置网格底板5,以待放网机械手62拾取,储网单元712用于层叠存储网格底板5。拾网装置包括拾网部件72和拾网驱动部件73,拾网部件72通过拾网驱动部件73活动地连接于供网机架71,拾网装置用于将储网单元712上的网格底板5输送至网格定位板711。当储网单元712的数量具有两个或两个以上,则多个储网单元712需设置在拾网部件72的运动轨迹上。
50.在某些可选地实施例中,第一输送带11的一端设有定位装置,定位装置包括定位座12、限位块13以及两个相对设置的定位块14,限位块13固定连接于定位座12,两个定位块14可滑动地连接于定位座12以使两个定位块14能相向运动或相背运动,限位块13和两个定位块14形成定位凹槽。定位块14采用气缸推动,以实现定位块14与定位座12的相对运动。当第一输送带11上的弯折筐体1运动至定位凹槽内后,两个定位块14相向运动以夹持弯折筐体1,限制弯折筐体1的姿态,以待第一上料机械手21抓取。
51.进一步地,第一焊接装置22上还设有焊接夹持部件222,焊接夹持部件222包括两个相对设置且均可滑动地连接于第一焊接装置22的焊接夹持块2221,点焊头221位于两个焊接夹持块2221之间,第一上料机械手21将弯折筐体1输送至两个焊接夹持块2221之间,两个焊接夹持块2221夹持弯折筐体1以待点焊头221对弯折筐体1进行焊接。
52.为了驱动第二焊接装置32的焊接头322运动,焊接驱动部件323包括用于在第一方向上驱动焊接头322和第二焊接装置32相对运动的第一驱动部3231、用于在第二方向上驱动焊接头322和第二焊接装置32相对运动的第二驱动部3232以及用于在第三方向上驱动焊接头322和第二焊接装置32相对运动的第三驱动部3233,第一方向、第二方向和第三方向两两相垂直设置。这使得焊接头322能在三轴方向上运动,以实现多方向焊接第一筐体2。
53.本发明的手推车篮筐生产组件的冲压机构40还包括位于冲压装置42和第二焊接装置32之间的推料装置43,结合图6所示,推料装置43上设有推料台431以及可滑动地连接于推料台431的推料部件432,推料部件432可靠近或远离冲压装置42运动。第三上料机械手41将第二焊接装置32上完成焊接的第二筐体3输送至推料台431,推料部件432优选由气缸推动,以实现推料部件432将推料台431上的第二筐体3推动至冲压装置42。
54.供网机架71上设有至少一个网格定位装置,网格定位装置包括固定连接于供网机架71的网格限位块71313以及可滑动地连接于供网机架71的网格定位块71414,网格限位块71313和网格定位块71414分别位于网格定位板711的两侧。当网格底板5被拾网装置输送至网格定位装置上后,网格定位块71414在气缸的作用下顶推网格定位板711上的网格底板5的一侧,迫使网格底板5的另一侧抵接于网格限位块71313,实现网格底板5的定位。
55.在某些可选地实施例中,放网机构60还包括放网定位装置,放网定位装置包括放网机架63、放网夹持部件和阻拦部件65,放网夹持部件包括两个相对设置且均可滑动地连接于放网机架63的放网夹持块64,阻拦部件65位于放网机构60的出料侧,阻拦部件65活动
连接于放网机架63,阻拦部件65用于阻拦第二输送带61上的工件。在放网机械手62执行放网操作时,放网夹持部夹持第三筐体4,以免第三框体意外偏离预定位置。
56.相比现有技术,本发明的有益效果在于:先由第一焊接机构20进行点焊焊接,再由第二焊接机构30上的视觉识别部件321进行自动质检,质检合格的筐体才进行第二焊接装置32的焊接,焊接后的筐体经冲压及放网,实现手推车框的自动化生产及质检。
57.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1