一种激光焊接工作台
1.本发明涉及激光焊接设备技术领域,具体为一种激光焊接工作台。
背景技术:
2.激光焊接由于能源高度集中和热影响区小,符合优质、低耗、高效、清洁、热影响区窄、接头变形小、操作灵活等技术发展方向,并且具有高能量密度、深穿透、高精度、适应性强等优点,不仅生产率高于传统焊接方法,而且焊接质量也得到了显著的提高。随着激光焊接的产品越来越广,反光强材料越来越多,垂直焊接对激光器带来的伤害不容忽视,降低反光材料对激光器的唯一有效的方法就是采用角度焊接,此外对于同一个工件具有多个不同高度的台阶时,激光头在焊接过程中也需要调整角度,如:台阶与平面混合焊时,所需焊接角度不同,需要激光头自动旋转才能够实现。此外,早期焊接工作台未采用激光防护,容易对操作人员造成伤害。
技术实现要素:
3.基于上述所存在的问题,本发明旨在提供一种结构简单、焊接角度可调、自动化程度高、焊接效率高的激光焊接工作台。
4.为实现上述目的,本发明采用如下技术方案:一种激光焊接工作台,包括激光焊接头,所述激光焊接头设置在六自由度并联平台上,所述六自由度并联平台通过螺栓设置z轴移动平台上,所述z轴移动平台通过螺栓设置在龙门支架上,所述龙门支架固定在工作台上:所述工作台安装有xy轴移动平台,所述xy轴移动平台上设置有焊接平台,所述焊接平台上设置有工件夹具。
5.进一步地,所述的激光焊接工作台,其中,所述六自由度并联平台由静平台、动平台、电动推杆、球铰构成。所述动平台与六个球铰连接,所述六个球铰与电动推杆连接,所述六个电动推杆再与六个球铰连接。最后六个球铰与静平台连接。
6.进一步地,所述的激光焊接工作台,其中,所述电动推杆由伺服电机驱动,六个电动推杆采用并联布置,通过电缸内置的丝杠副将电机的转动转化为直线运动,传递给推杆,带动每个支链作伸缩运动。工作过程就是控制电缸的伸缩量从而带动动平台在空间实现多自由度方向上的运动。
7.进一步地,所述的激光焊接工作台,其中,所述移动部件在所述工作台水平面内沿两个相互垂直的轴向上可移动,并在每个轴向上设置有步进电机控制所述移动部件的位移。
8.进一步地,所述的激光焊接工作台,其中,在所述龙门支架上设置有用于控制所诉激光工作头做垂直所述工作台水平面竖向移动的移动控制结构。
9.进一步地,所述的激光焊接工作台,其中x轴结构为一电机驱动的直线导轨。
10.进一步地,所述的激光焊接工作台,其中y轴结构为一电机驱动的直线导轨。
11.进一步地,所述移动平台通过伺服控制器来进行控制。
12.与现有技术相比,本发明提供了一种激光焊接工作台,具有以下有益效果:1、该激光焊接工作台,通过设置直线导轨和电动导轨滑台本发明采用精密伺服平台带动激光焊接头走轨迹,保证焊接轨迹精度。
13.2、该激光焊接工作台激光头安装在六自由度并联平台上,通过改变六个电动推杆的伸缩长度,可驱动激光头进行位姿变换。通过将六自由度并联平台固定在直线导轨上,扩大了六自由度并联机构的工作空间,能够满足各种角度焊接的要求。
附图说明
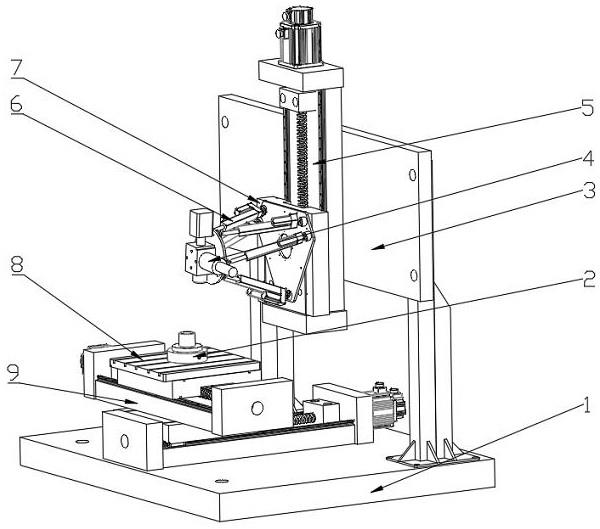
14.图1为本发明激光焊接工作台的结构示意图;图2为本发明中的六自由度并联平台结构示意图;图3为本发明中六自由度并联平台支链示意图;图中各标号表示:1、台面;2、工件夹具;3、龙门支架;4、激光焊接头;5、z轴移动平台;6、六自由度并联平台;61、静平台;62、电动推杆;621、电缸;622、推杆;623、伺服电机;63、动平台;64、球铰;7、安装座;8、焊接台;9、xy轴移动平台。
具体实施方式
15.为使本发明解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面将结合说明书附图和具体实施例对本发明作进一步的详细描述。
16.如图1至图3所示,本实施例的激光焊接工作台,包括台面1、xy轴移动平台9、z轴移动平台5、朝向xy轴移动平台9设置的光纤焊接头4、以及设于xy轴移动平台9上的工件夹具2,z轴移动平台5上设有安装座7通过螺栓链接有六自由度并联平台6,激光焊接头4通过螺栓连接在六自由度并联平台6远离z轴移动平台5的一端。
17.本实施例所述激光焊接工作台,包括激光焊接头4,所述激光焊接头4设置在六自由度并联平台6上,所述六自由度并联平台6设置在z轴移动平台5上,z轴移动平台5设置龙门支架3上。
18.本实施例所述激光焊接工作台,在z轴移动平台5上设置安装座7,安装座7上设置六自由度并联平台6,激光焊接头4设置在六自由度并联平台6上,通过控制六自由并联平台6每个电缸621伸缩量的变化,使得激光焊接头4实现三维空间的旋转和移动,从而调节激光焊接头4的焊接角度。
19.进一步地,如图2所示,本实施例中,所述六自由度并联平台6由静平台61、动平台63、电动推杆62、球铰64构成。所述动平台63与六个球铰64连接,所述六个球铰64与电动推杆62连接,所述六个电动推杆62再与六个球铰64连接。最后六个球铰64与静平台61连接。
20.进一步地,所述电动推杆62由伺服电机623驱动,六个电动推杆62采用并联布置。通过电缸621内置的丝杠副将伺服电机623的转动转化为直线运动,传递给推杆622,带动每个支链作伸缩运动。工作过程就是通过控制电缸621的伸缩量,从而带动安装在动平台上的激光焊接头4在三维空间实现多自由度方向上的运动。
21.进一步地,本实施例所述xy轴移动平台9可移动的两个轴向设置为相互垂直,并在每个轴向设置有伺服电机控制,用来控制xy轴移动平台9的位移;同时在所述xy轴移动平台9上还设置有一焊接台8,在所述焊接台8上设置有固定等待加工的工作件的焊接夹具2。
22.进一步地,本实施例中,所述激光焊接工作台三轴联动功能和六自由度并联平台6的平移和旋转通过伺服平台的控制实现,操作人员可以通过伺服控制平台对工作台的三个不同的轴和六自由度并联平台实现同步控制,六自由度并联平台6的移动和旋转角度可以通过机构运动学的计算编好每一个模式的程序来控制,实现空间任意轨迹的连续焊接。
23.工作时,将所需焊接工件通过工件夹具4夹紧、固定,对工件盖板压紧,通过x/y/z轴调整焊接位置,通过电缸621内的丝杠副来控制每个电缸621的伸缩量的变化来实现焊接头三维空间的旋转和移动,达到不同角度焊接的目的。
24.虽然本发明已以较佳实例揭露如上,然而并非用以限定本发明。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围的情况下,都可以利用上述揭示的技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术保护的范围内。
技术特征:
1.一种激光焊接工作台,包括激光焊接头,所述激光焊接头设置在六自由度并联平台上,所述六自由度并联平台通过螺栓设置在z轴移动平台上,所述z轴移动平台通过螺栓设置在龙门支架上,所述龙门支架固定在工作台上:所述工作台安装有xy轴移动平台,所述xy轴移动平台上设置有焊接平台,所述焊接平台上设置有工件夹具。2.根据权利要求1所述的一种激光焊接工作台,其特征在于:所述六自由度并联平台由静平台、动平台、电动推杆、球铰构成,所述动平台与六个球铰连接,所述六个球铰与电动推杆连接,所述六个电动推杆再与六个球铰连接,最后六个球铰与静平台连接。3.根据权利要求2所述的一种激光焊接工作台,其特征在于:所述电动推杆由伺服电机驱动,六个电动推杆采用并联布置,通过电缸内置的丝杠副将电机的转动转化为直线运动,传递给推杆,带动每个支链作伸缩运动,工作过程就是控制电缸的伸缩量从而带动动平台在空间实现多自由度方向上的运动。4.根据权利要求1至3中任意一项所述的一种激光焊接工作台,其特征在于:所述工作台水平面内沿两个相互垂直的轴向上可移动,并在每个轴上设置有步进电机控制所述移动部件的位移。5.根据权利要求1至3中任意一项所述的一种激光焊接工作台,其特征在于:所述龙门支架上设置有用于控制所述激光焊接头做垂直所述工作台水平面竖向移动的移动控制结构。
技术总结
本发明公开了一种激光焊接工作台,包括激光焊接头,所述激光焊接头设置在六自由度并联平台上,所述六自由度并联平台通过螺栓设置在Z轴移动平台上,所述Z轴移动平台通过螺栓设置在龙门支架上,所述龙门支架固定在工作台上,所述工作台安装有XY轴移动平台,所述XY轴移动平台上设置有焊接平台,所述焊接平台上设置有工件夹具。本发明提供的一种激光焊接工作台大大的提高了产品的定位精度,满足了各种角度焊接,自动化程度高,大大的减少人工成本,提高产能。能。能。
技术研发人员:彭宝营 朱昱硕 王鹏家 李潭 王喆
受保护的技术使用者:北京信息科技大学
技术研发日:2022.10.28
技术公布日:2022/12/1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1