一种自动化作业用设备位置安装调节系统及调节方法与流程
本发明涉及设备位置安装调节,尤其涉及一种自动化作业用设备位置安装调节系统及调节方法。
背景技术:
1、机电设备一般指机械、电器及电气自动化设备,在建筑中多指除土工、木工、钢筋、泥水之外的机械、管道设备的统称,它不同于五金,多指能实现一定功能的成品,随着人民生活水平的不断提高,人们在日常生活中对机电设备的需求越来越多,从交通工具到各种家用电器、计算机、打印机等已成为人们生活中不可缺少的机电产品。
2、现有工厂内的一些小型机电设备通常由人工进行搬运安装,为了便于根据各个机电设备之间的连接更为紧密,从而利于自动化作业,因此需要根据实际情况对安装过程中的机电设备进行调整位置,但是目前一些机电设备的重量一般较重,在安装时不便于调节位置,人工操作需要浪费大量的人力物力,且在长时间使用过程中易导致机电设备间的连接发生偏移,因此本发明提出了一种自动化作业用设备位置安装调节系统及调节方法。
技术实现思路
1、基于现有的上述提出的技术问题,本发明提出了一种自动化作业用设备位置安装调节系统及调节方法。
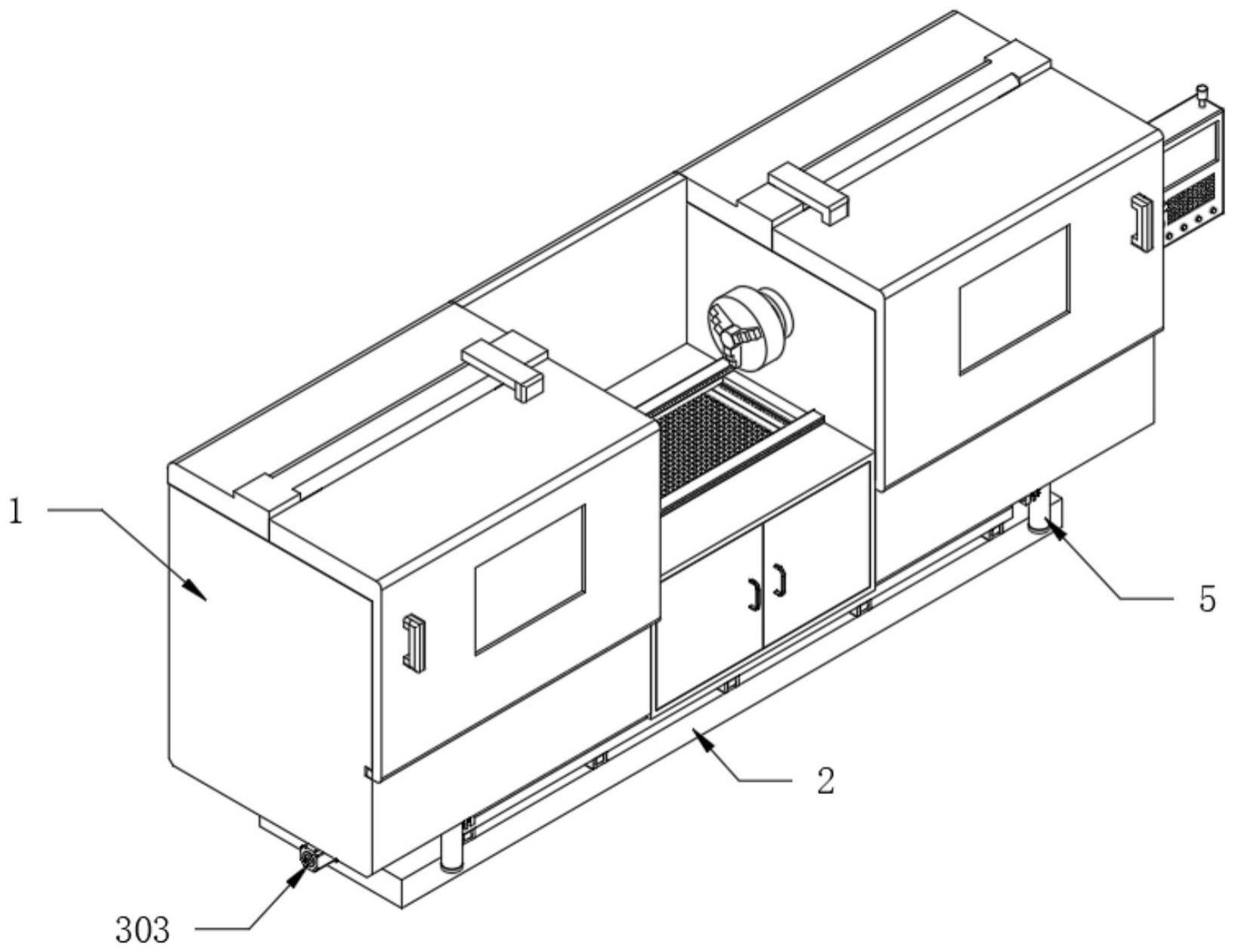
2、本发明提出的一种自动化作业用设备位置安装调节系统,包括设备主体,所述设备主体的下表面设置有支撑板,所述支撑板的上表面设置有左右移动机构,所述左右移动机构的内部设置有主支撑机构,所述设备主体的下表面两侧分别设置有副支撑机构,所述左右移动机构的上方设置有伸缩机构。
3、其中,所述左右移动机构用于带动所述设备主体进行左右移动,从而便于对所述设备主体的左右位置进行调节。
4、其中,所述主支撑机构用于对所述设备主体进行支撑。
5、其中,所述副支撑机构用于对通过所述左右移动机构调节后的所述设备主体进行支撑。
6、其中,所述伸缩机构用于带动所述设备主体进行上下移动,从而便于对所述设备主体的高度位置进行调节。
7、优选地,所述左右移动机构包括多个滑轨,多个所述滑轨的下表面两侧分别通过紧固螺栓固定安装在所述支撑板的上表面,多个所述滑轨的内壁分别滑动卡接有滑块,多个所述滑块的上表面均固定安装有安装板。
8、通过上述技术方案,滑块沿着滑轨内壁移动时带动安装板移动,安装板的移动带动设备主体移动。
9、优选地,所述支撑板的一侧表面固定安装有伺服电机,所述伺服电机的输出轴一端通过联轴器固定套接有转轴,所述转轴的表面分别固定套接有多个齿轮。
10、通过上述技术方案,伺服电机输出轴的转动通过联轴器带动转轴转动,转轴的转动带动多个齿轮进行同步转动。
11、优选地,所述支撑板的上表面开设有多个凹槽,所述滑块的下表面固定安装有齿条,所述齿条的一端延伸至所述凹槽内并与所述齿轮的表面啮合。
12、通过上述技术方案,齿轮的转动通过与齿条的啮合带动齿条移动,齿条的移动带动滑块沿着滑轨的内壁移动。
13、优选地,所述主支撑机构包括多个推动气缸,多个所述推动气缸的表面呈矩形阵列分布设置在所述支撑板的内壁,且所述推动气缸的活塞杆一端延伸至所述支撑板的外表面并固定连接有支板,所述支板位于两个所述滑轨之间。
14、通过上述技术方案,两两推动气缸活塞杆一端与一个支板的上表面进行连接,并通过两个推动气缸活塞杆的同步伸缩带动支板上下移动,从而对滑轨与滑轨之间的空隙进行填补,便于对设备主体进行支撑。
15、优选地,所述副支撑机构包括支撑套,所述支撑套的上表面固定安装在所述设备主体的下表面,所述支撑套的内壁通过轴承安装有调节螺杆,所述调节螺杆的外表面螺纹连接有螺纹套。
16、通过上述技术方案,支撑套设置在设备主体的下表面用于支撑,并通过调节螺杆的转动带动螺纹套伸缩,继而便于对设备主体进行支撑,确保设备主体在调整位置保持平衡。
17、优选地,所述螺纹套的一端固定套接有伸缩套,所述伸缩套的外表面与所述支撑套的内壁滑动连接,所述伸缩套的外表面两侧对称分布有两个限位杆,所述支撑套的内壁呈对称开设有限位滑槽,所述限位杆的外表面与所述限位滑槽的内壁滑动卡接。
18、通过上述技术方案,为了便于伸缩,通过调节螺杆进行转动,使得其外表面套接的螺纹套在支撑套内部水平移动,进而带动伸缩套在支撑套的内壁水平移动,实现伸缩套在支撑套内伸缩,为了对伸缩套的伸缩进行导向限位,通过伸缩套在伸缩时,使其外表面的限位杆在限位滑槽的内壁滑动。
19、优选地,所述伸缩套的一端延伸至所述支撑套的外表面并固定连接有支撑垫,所述支撑垫的直径大于所述支撑套的支架,所述支撑套的外表面固定安装有步进电机,所述步进电机的输出轴一端固定套接有锥形齿轮,另一所述锥形齿轮的轴心处与所述调节螺杆的一端固定套接,两个所述锥形齿轮相互啮合。
20、通过上述技术方案,为了驱动调节螺杆转动,通过步进电机输出轴的转动带动与其套接的锥形齿轮转动,锥形齿轮的转动通过与另一锥形齿轮的啮合带动调节螺杆转动,伸缩套的移动带动支撑垫移动,使得支撑垫与地面接触,从而对设备主体进行支撑,同时增大支撑垫的直径增大支撑垫的受力面积,且防止支撑垫随着伸缩套的移动进入支撑套内。
21、优选地,所述伸缩机构包括剪刀架,所述剪刀架的上下两端分别通过销轴铰接有上凹形板和下凹形板,所述上凹形板的上表面与所述设备主体的下表面固定连接,所述下凹形板的下表面与所述安装板的上表面固定连接,所述上凹形板和所述下凹形板的表面均开设有定位滑槽,所述定位滑槽的内壁滑动卡接有滑杆,两个所述滑杆的两端分别与所述剪刀架的两端铰接,所述下凹形板的上表面固定安装有驱动电机,所述驱动电机的输出轴一端固定连接有旋转螺杆,其中一个所述滑杆的轴心处固定连接有限位块,所述限位块的内壁与所述旋转螺杆的表面螺纹连接,所述下凹形板的上表面固定安装有导轨,所述限位块的表面与所述导轨的表面滑动卡接。
22、通过上述技术方案,驱动电机输出轴的转动带动旋转螺杆转动,旋转螺杆的转动带动与其螺纹连接的限位块沿着导轨的表面移动,限位块的移动带动与其连接的滑杆沿着定位滑槽的内壁移动,从而带动剪刀架伸缩,并带动另一滑杆沿着另一定位滑槽的内壁移动,进而便于调整设备主体的高度位置。
23、本发明提出的一种自动化作业用设备位置安装调节系统的调节方法,其调节方法为:s1、将设备主体安装在所需位置上,在安装好其他设备后,根据设备间的联系,对设备主体的位置进行调整。
24、s2,当设备主体的高度需要调整时,启动驱动电机,驱动电机输出轴的转动带动旋转螺杆转动,旋转螺杆的转动带动与其螺纹连接的限位块沿着导轨的表面移动,限位块的移动带动与其连接的滑杆沿着定位滑槽的内壁移动,从而带动剪刀架伸缩,并带动另一滑杆沿着另一定位滑槽的内壁移动,通过剪刀架的伸缩带动设备主体上下移动,通过旋转螺杆转动的距离确定好设备主体升降的距离,进而调整到合适的位置。
25、s3、当设备主体的水平位置需要调整时,启动伺服电机,伺服电机输出轴的转动通过联轴器带动转轴转动,转轴的转动带动多个齿轮进行同步转动,齿轮的转动通过与齿条的啮合带动齿条移动,齿条的移动带动滑块沿着滑轨的内壁移动,滑块沿着滑轨内壁移动时带动安装板移动,安装板的移动通过伸缩机构带动设备主体移动,从而便于调整设备主体的水平位置,同时安装板内推动气缸的活塞杆同步伸出带动支板与支撑板接触挤压,对设备主体进行支撑。
26、s4、由于设备主体的重心发生偏移,因此为防止设备主体发生倾斜,启动远离安装板一侧的副支撑机构上的步进电机,步进电机输出轴的转动带动与其套接的锥形齿轮转动,锥形齿轮的转动通过与另一锥形齿轮的啮合带动调节螺杆转动,调节螺杆的转动带动螺纹套在支撑套内部水平移动,进而带动伸缩套在支撑套的内壁水平移动,并使得限位杆沿着限位滑槽的内壁移动,直到支撑垫与地面接触,从而对设备主体进行支撑。
27、本发明中的有益效果为:
28、1、通过设置左右移动机构,便于在水平方向上对设备主体的位置进行调整,减少人工搬运挪动,从而浪费的人力物力,伺服电机输出轴的转动带动转轴转动,转轴通过轴承安装在支撑板内,提高转轴转动的平稳性,并在转轴的转动下带动齿轮转动,通过齿轮与齿条的啮合带动齿条移动,从而带动滑块沿着滑轨的内壁移动,进而实现带动设备主体左右移动。
29、2、通过设置主支撑机构和副支撑机构,有利于确保设备主体在位置调整前和位置调整后都具备稳定性,减少设备主体因受力不均发生倾倒。
30、3、通过设置伸缩机构,便于在垂直方向上对设备主体的位置进行调整,使得各个设备之间能够贴合,驱动电机输出轴的转动带动旋转螺杆转动,旋转螺杆通过轴承安装在下凹形板上,提高旋转螺杆转动的平稳性,并在旋转螺杆的转动下带动限位块沿着导轨移动,从而带动剪刀架伸缩,进而实现上下移动设备主体。
- 还没有人留言评论。精彩留言会获得点赞!