针对微细管的自由弯曲推压复合装置及方法
1.本发明涉及管材自由弯曲成形技术领域,具体是针对微细管的自由弯曲推压复合装置及方法。
背景技术:
2.近年来,随着科学技术的迅速发展,产品逐渐朝着微型化、便携化和多功能化发展。金属微细管因其质量轻、强度高、表面粗糙度低和耐腐蚀性好等优点而被应用在如微型卫星、微型飞行器、微型无人车和微型无人潜水艇等军事装备上。由于微型装备内部空间小、结构复杂等问题,微压弯、微绕弯及激光热弯曲等传统成形方法所制造的产品已难以满足其需求,严重制约了微型设备的研制和实际应用。
3.微细管的自由弯曲成形技术是亚毫米级别的新型塑性加工成形工艺,所生产的管类产品具有成形质量好、精度高、成本低等优点。然而,伴随着零件特征尺寸的减小,宏观上的管材推进机构和压紧机构已难以适用。现有推进机构和压紧机构的尺寸形状和动作配合过程,只能作用于直径5mm以上的管材,很难覆盖到微细金属管材。
4.因此,基于此现在提供针对微细管的自由弯曲推压复合装置及方法。
技术实现要素:
5.本发明的目的在于提供针对微细管的自由弯曲推压复合装置及方法,以解决背景技术中的问题。
6.为实现上述目的,本发明提供如下技术方案:
7.针对微细管的自由弯曲推压复合装置,包括用于对待成型管材进行紧压引导的压紧部和用于对待成型管材端部进行推动以实现进给的推进部;
8.压紧部整体为u型结构,u字母内制作的异形槽可同时满足管材的放置及推杆的移动,异形槽的间距控制在0.2-0.3mm之间;
9.推进部包括用于带动推杆移动的丝杠组件、用于引导推杆移动的推进组件和以及为丝杆组件提供动力的动力组件;
10.丝杠组件包括两个轴承座安装板、两个丝杠支座、丝母座、滚珠丝杆轴和螺帽;
11.轴承座安装板直接固定在机身上,丝杠支座安装在轴承座安装板的上端面,并且需要保证其上开孔呈中心轴对称以确保后续部件安装的精度;滚珠丝杠轴安装在丝母座内且通过螺帽约束,后端使用卡簧锁死,丝杠轴的旋转可驱动螺帽带动丝母座进行直线移动,丝杠轴的输入端与动力组件传动连接;
12.在上述技术方案的基础上,本发明还提供以下可选技术方案:
13.在可选方案中:所述推进组件包括推杆、微型直线导轨、转接板、推进座、防撞块和导轨安装座;推杆通过转接板固定在推进座上,推进座与丝母座连接并与微型直线导轨上的滑块绑定,微型直线导轨则固定在导轨安装座上,随着滚珠丝杠轴的动作,推杆可沿管材进给方向直线移动,防撞块的制造材料为聚氨酯树脂,安装在推进座上。
14.在可选方案中:所述动力组件包括一个伺服电机,所述伺服电机的输出端通过联轴器连接扭矩传感器的一端,扭矩传感器的另一端通过联轴器与其中一个皮带轮的固定轴连接固定,另一个皮带轮设置在丝杠轴的端部,两个皮带轮之间通过皮带传动连接,动力组件还包括用于调节皮带松紧程度的调节件。
15.在可选方案中:所述调节件包括两个平行设置的同步带调节板,靠近丝杠轴4的同步带调节板固定设置在另一个辅助轴承座安装板上,另一个同步调节板底部设有与辅助轴承安装板滑动设置的调节滑座,可滑动的同步带调节板上设有用于安装伺服电机的电机安装板,两个同步带调节板之间设有两个同步带调节轴,同步带调节轴一端与一个同步带调节板转动连接,同步带调节轴另一端设有两个调节螺母,两个调节螺母之间的间隙与可滑动的同步带调节板表面的卡口相配合。
16.在可选方案中:所述压紧部由四个压紧块构成,为上压紧块a1、上压紧块b1、下压紧块a2和下压紧块b2,并且压紧块需要以a-b-a-b的顺序排列在导轨安装座上,采用圆柱销和内六角螺栓进行定位和固定。
17.在可选方案中:所述压紧部的材料聚甲醛树脂。
18.在可选方案中:所述推杆由基体和顶针组成,基体采用了t型结构且在t字母的下端开设了内凹槽;顶针的直径与成形管材外径一致,整体长度在完全嵌入基体的同时还需露出2.5mm,且顶针前端打磨出锥度。
19.相较于现有技术,本发明的有益效果如下:
20.1、本技术方案提供了针对微细管的自由弯曲推压复合装置,通过该推压复合装置中推进部和压紧部的相互配合,可实现对φ5mm以下微细金属管的压紧作用,增强对待成型微细金属管的约束力,有效避免了推进过程中失稳现象的产生,显著提升微细金属管自由弯曲成形能力和效率。
21.2、本技术方案提供的推压复合装置使用方法,通过伺服电机上的扭矩传感器可在自由弯曲过程中实时读取数据并传输到设备控制端进行二次计算及执行判断指令,避免推力过大而造成推杆发生折断的故障,有效的避免了设备损伤并保障了操作人员的安全性。
附图说明
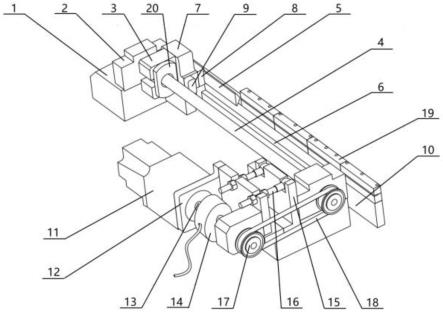
22.图1为本发明的结构示意图。
23.图2为本发明上压紧块a1和下压紧块a2的结构示意图。
24.图3为本发明的上压紧块a1和上压紧块b1结构示意图。
25.图4为本发明的一个实施例中下压紧块a2和下压紧块b2结构示意图。
26.图5为本发明顶针和基体的结构示意图。
27.图6为本发明的顶针和基体截面图。
28.图7为本发明扭矩传感器传动的结构示意图。
29.图8为本发明的工作流程图。
30.附图标记注释:1、轴承座安装板;2、丝杠支座;3、丝母座;4、滚珠丝杆轴;5、推杆;5.1、顶针;5.2、基体;6、微型直线导轨;7、转接板;8、推进座;9、防撞块;10、导轨安装座;11、伺服电机;12、电机安装板;13、联轴器;14、扭矩传感器;15、同步带调节板;16、同步带调节轴;17、皮带轮;18、皮带;19、压紧部;19.1、上压紧块a1;19.2、上压紧块b1;19.3、下压紧块
a2;19.4、下压紧块b2;20、螺帽。
具体实施方式
31.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。
32.在一个实施例中,如图1-图8所示,针对微细管的自由弯曲推压复合装置,包括用于对待成型管材进行紧压引导的压紧部和用于对待成型管材端部进行推动以实现进给的推进部;
33.推进部包括丝杠组件、推进组件和动力组件
34.丝杠组件包括两个轴承座安装板、两个丝杠支座、丝母座、滚珠丝杆轴4和螺帽20;
35.轴承座安装板1直接固定在机身上,丝杠支座安装在轴承座安装板1的上端面,并且需要保证其上开孔呈中心轴对称以确保后续部件安装的精度;滚珠丝杠轴4安装在丝母座3内且通过螺帽约束,后端使用卡簧锁死,丝杠轴4的旋转可驱动螺帽20带动丝母座进行直线移动。
36.推进组件包括推杆5、微型直线导轨6、转接板7、推进座8、防撞块9和导轨安装座10;
37.推杆5通过转接板7固定在推进座8上,推进座8与丝母座3连接并与微型直线导轨6上的滑块绑定,微型直线导轨6则固定在导轨安装座10上,随着滚珠丝杠轴4的动作,推杆5可沿管材进给方向直线移动。
38.防撞块9的制造材料为聚氨酯树脂,安装在推进座8上,可防止推进组件的极限移动而对部件造成碰撞损伤。
39.所述动力组件包括一个伺服电机11、一个电机安装板12、两个联轴器13、一个扭矩传感器14、两个同步带调节板15、两个同步带调节轴16、两个皮带轮17和一个皮带18;
40.所述伺服电机11的输出端通过联轴器13连接扭矩传感器14的一端,扭矩传感器14的另一端通过联轴器与其中一个皮带轮17的固定轴连接固定,另一个皮带轮设置在丝杠轴4的端部,两个皮带轮之间通过皮带18传动连接,动力组件还包括用于调节皮带18松紧程度的调节件,皮带18的材质为橡胶,芯线材质为玻璃纤维,既满足了柔性变形的需求,又保证了其机械强;
41.调节件包括两个平行设置的同步带调节板15,靠近丝杠轴4的同步带调节板固定设置在另一个辅助轴承座安装板上,另一个同步调节板底部设有与辅助轴承安装板滑动设置的调节滑座,可滑动的同步带调节板上设有用于安装伺服电机11的电机安装板12,两个同步带调节板15之间设有两个同步带调节轴16,同步带调节轴16一端与一个同步带调节板15转动连接,同步带调节轴16另一端设有两个调节螺母,两个调节螺母之间的间隙与可滑动的同步带调节板表面的卡口相配合,可通过调整两个同步带调节轴16上的调节螺母来改变两个同步带调节板15之间的距离,进而控制皮带18的松紧度来确保伺服电机11动力传输的有效性。
42.压紧部
43.结构如图2所示。压紧部19整体为u型结构,u字母内制作的异形槽可同时满足管材的放置及推杆5的移动,异形槽的间距控制在0.2-0.3mm之间;压紧部19由四个压紧块构成,
为上压紧块a1(19.1)、上压紧块b1(19.2)、下压紧块a2(19.3)和下压紧块b2(19.4),并且压紧块需要以a-b-a-b的顺序排列在导轨安装座10上,采用圆柱销和内六角螺栓进行定位和固定;压紧部19的材料聚甲醛树脂,摩擦阻力小且具有优秀的机械强度和耐疲劳性能,可确保推杆(5)运动顺利的同时也保证了管材成形的表面质量。
44.如图3所示,推杆5由基体5.2和顶针5.1组成,基体5.2采用了t型结构且在t字母的下端开设了内凹槽,既保证了推杆整体在运动过程中的稳定性,又给顶针5.1预留了安装位置;顶针5.1的直径与成形管材外径一致,整体长度在完全嵌入基体5.2的同时还需露出2.5mm,且顶针5.1前端打磨出锥度,方便插入成形管材内保证推进效果;顶针5.1采用激光焊接工艺固定在基体5.2上,且推杆5整体用内六角螺栓固定在转接板7上。
45.扭矩传感器安装位置如图4所示。伺服电机11采用的是速度控制模式,随着转速的增加,扭矩也增大;扭矩传感器14为动态扭矩传感器,水平安装在两个联轴器13的中间位置,保证同心度小于φ0.05mm;扭矩传感器14可实时通过数据线将电信号传输到设备的控制端,在计算机内将数据进行计算并反馈出推力的具体数值。
46.本实施例以自由弯曲成形技术为基础,提供了适用于微细管的自由弯曲推压复合装置的使用方法,如图5所示,以直径1.6mm管材为例,包括以下步骤:
47.s1,推力的计算:根据伺服电机11的转矩t、滚珠丝杠轴4的螺距t及传动效率η,计算最大推力传动效率η取值为0.98;
48.s2,上料:准备待成形的1.6mm管材,将管材沿推杆5进给方向放置于压紧部19;
49.s3,检查:检查并保证设置装备状态指示灯为绿色信号,输入推杆5的推力上限值fmax=12n;
50.s4,成形:在推进装置的作用下,管材沿进给方向运动进行自由弯曲成形过程;动态扭矩传感器14持续读取转矩输出值并反馈到设备控制端进行计算并执行判断指令:转矩t=0.3n
·
m,则f=11n<fmax=12n,伺服电机11继续运转保证管材的成形过程;转矩t=0.4n
·
m,则f=14.7n≥fmax=12n,设备控制端对电机下达停止指令,反转伺服电机11)3s,控制推杆5后移释放应力,保护设备及操作人员安全。
51.以上所述,仅为本公开的具体实施方式,但本公开的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本公开揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本公开的保护范围之内。因此,本公开的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1