一种焊接变位机构的制作方法
本发明涉及焊接设备,具体涉及一种焊接变位机构。
背景技术:
1、焊接也称作熔接、镕接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术。焊接通常通过下列三种途径达成接合的目的:第一,熔焊,即加热欲接合之工件使之局部熔化形成熔池,熔池冷却凝固后便接合,必要时可加入熔填物辅助;第二,压焊,即焊接过程必须对焊件施加压力,属于各种金属材料和部分金属材料的加工;第三、钎焊,即采用比母材熔点低的金属材料做钎料,利用液态钎料润湿母材,填充接头间隙,并与母材互相扩散实现链接焊件。现代焊接的能量来源有很多种,包括气体焰、电弧、激光、电子束、摩擦和超声波等。
2、为提高产品质量、提高生产率以及减低焊工劳动强度,在工程机械、铁路、桥梁、金属结构等制造业中,焊接机器人及其配套的焊接变位机构的应用越来越多。
3、目前,液压支架焊接需要人工多次调整焊接角度,降低爬坡焊缝的坡度,使焊缝更易成型且美观。但是液压支架大多比较笨重,人工翻转使得工人的劳动强度很大,部分工件焊前还需要预热,因此整体的生产效率低,工人作业环境十分恶劣,且存在安全隐患。
技术实现思路
1、本发明针对目前液压支架焊接需要人工多次调整焊接角度导致的工人作业强度大、生产效率低、存在安全隐患等问题,提出了一种焊接变位机构,该焊接变位机构能够达到自动倾翻工件的效果,进而改变爬坡焊缝的坡度,实现一次装夹多个部位的爬坡焊缝焊接,自动化程度更高,改善人员的作业环境。
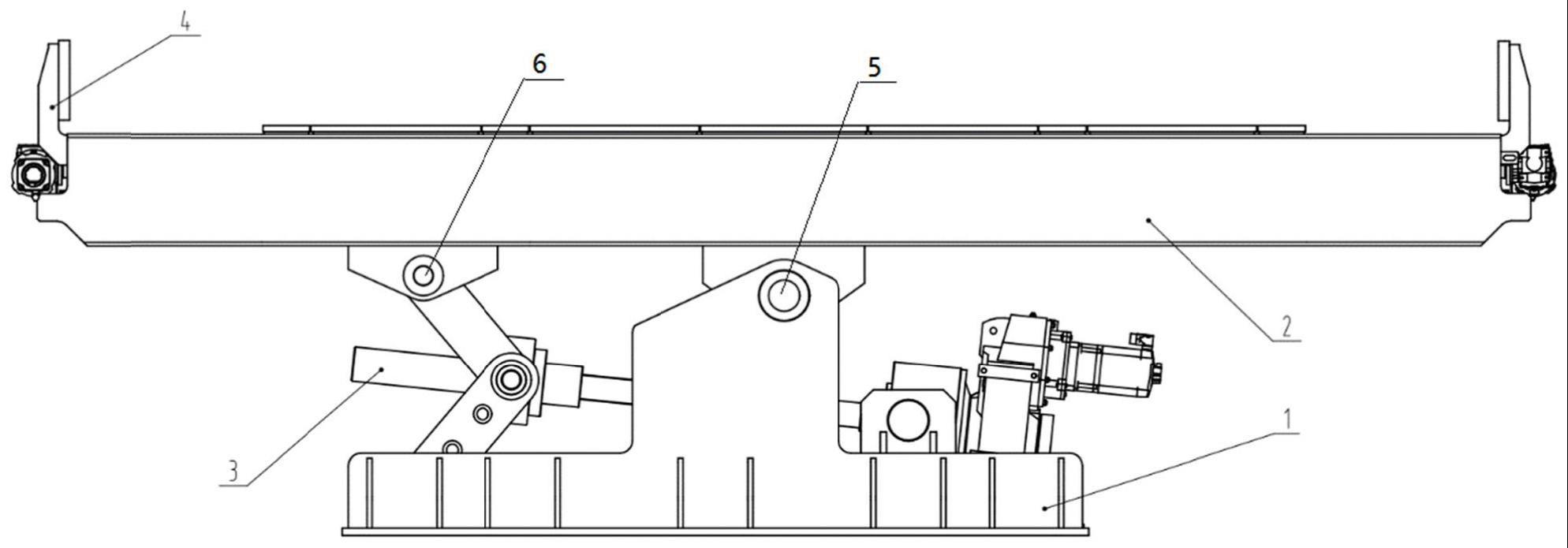
2、本发明提出了一种焊接变位机构,包括底座、平台以及夹持机构,平台设置于底座的上端,夹持机构固定于平台的上端面并能够夹持工件,还包括顶升机构,平台与底座通过顶升机构相连,平台的下端面具有间隔设置的第一铰接点和第二铰接点,底座铰接于平台下端面的第一铰接点;顶升机构包括驱动组件以及连杆组件,连杆机构的一端铰接于底座的上端面,另一端铰接于平台下端面的第二铰接点,驱动组件能够驱动连杆组件以使平台绕第一铰接点转动。
3、优选的,连杆组件包括第一连杆和第二连杆,第一连杆的下端铰接于底座,上端铰接第二连杆的下端,第二连杆的上端铰接于平台下端面的第二铰接点。
4、优选的,连杆组件相对间隔设置有两个,两个连杆组件之间设置有铰轴,铰轴的两侧分别与两个第一连杆转动连接,驱动组件能够通过驱动铰轴运动以改变第一连杆和第二连杆之间的夹角。
5、优选的,连杆组件还包括第一支座,第一支座固定于底座的上端面,第一连杆的下端铰接于第一支座。
6、优选的,驱动组件包括第一驱动件、轴承箱以及第一驱动杆,轴承箱固定于底座的上端面,轴承箱的一侧设置有第一驱动件,另一侧转动设置有第一驱动杆,第一驱动杆远离轴承箱的另一端穿过铰轴的中部,且铰轴与第一驱动杆转动连接,第一驱动件能够驱动第一驱动杆转动以使铰轴沿第一驱动杆运动,进而推动第一连杆和第二连杆运动并改变第一连杆和第二连杆之间的夹角。
7、优选的,第一驱动杆设置为梯形丝杠。顶升机构由梯形丝杠驱动,与连杆以及铰轴相连,通过改变连杆夹角从而改变平台的倾覆角度。
8、优选的,驱动组件还包括第二支座,第二支座固定于底座的上端面,轴承箱通过第二支座固定于底座。
9、优选的,夹持机构包括第二驱动件、第二驱动杆、止挡以及轴承座,轴承座固定于平台的上端面,第二驱动杆的一端转动设置于轴承座,另一端与第二驱动件的驱动端相连,止挡可转动地套设于第二驱动杆,第二驱动件能够驱动第二驱动杆转动以使止挡沿第二驱动杆移动。
10、优选的,夹持机构还包括滑轨,滑轨固定于平台的上端面且滑轨与第二驱动杆平行设置,止挡滑动设置于滑轨,第二驱动件能够驱动止挡在滑轨上移动。
11、优选的,夹持机构设置有两个并相对的设置于平台的两端。夹持机构用于夹持工件进行定位并防止滑动,设置两套独立的夹持机构可使得夹持工件的长度连续可调。
12、本发明的有益效果是:
13、本发明提供的变位机通过夹持机构对工件进行装夹定位,通过顶升机构带动平台倾覆转动,从而改变爬坡焊缝的坡度,可以实现一次装夹多个部位的爬坡焊缝焊接,使工件的自动化程度更高,减少人员操作流程,改善作业环境。
技术特征:
1.一种焊接变位机构,包括底座、平台以及夹持机构,平台设置于底座的上端,夹持机构固定于平台的上端面并能够夹持工件,其特征在于,还包括顶升机构,平台与底座通过顶升机构相连,平台的下端面具有间隔设置的第一铰接点和第二铰接点,底座铰接于平台下端面的第一铰接点;顶升机构包括驱动组件以及连杆组件,连杆机构的一端铰接于底座的上端面,另一端铰接于平台下端面的第二铰接点,驱动组件能够驱动连杆组件以使平台绕第一铰接点转动。
2.根据权利要求1所述的焊接变位机构,其特征在于,连杆组件包括第一连杆和第二连杆,第一连杆的下端铰接于底座,上端铰接第二连杆的下端,第二连杆的上端铰接于平台下端面的第二铰接点。
3.根据权利要求2所述的焊接变位机构,其特征在于,连杆组件相对间隔设置有两个,两个连杆组件之间设置有铰轴,铰轴的两侧分别与两个第一连杆转动连接,驱动组件能够通过驱动铰轴运动以改变第一连杆和第二连杆之间的夹角。
4.根据权利要求2所述的焊接变位机构,其特征在于,连杆组件还包括第一支座,第一支座固定于底座的上端面,第一连杆的下端铰接于第一支座。
5.根据权利要求3所述的焊接变位机构,其特征在于,驱动组件包括第一驱动件、轴承箱以及第一驱动杆,轴承箱固定于底座的上端面,轴承箱的一侧设置有第一驱动件,另一侧转动设置有第一驱动杆,第一驱动杆远离轴承箱的另一端穿过铰轴的中部,且铰轴与第一驱动杆转动连接,第一驱动件能够驱动第一驱动杆转动以使铰轴沿第一驱动杆运动,进而推动第一连杆和第二连杆运动并改变第一连杆和第二连杆之间的夹角。
6.根据权利要求5所述的焊接变位机构,其特征在于,第一驱动杆设置为梯形丝杠。
7.根据权利要求5所述的焊接变位机构,其特征在于,驱动组件还包括第二支座,第二支座固定于底座的上端面,轴承箱通过第二支座固定于底座。
8.根据权利要求1所述的焊接变位机构,其特征在于,夹持机构包括第二驱动件、第二驱动杆、止挡以及轴承座,轴承座固定于平台的上端面,第二驱动杆的一端转动设置于轴承座,另一端与第二驱动件的驱动端相连,止挡可转动地套设于第二驱动杆,第二驱动件能够驱动第二驱动杆转动以使止挡沿第二驱动杆移动。
9.根据权利要求8所述的焊接变位机构,其特征在于,夹持机构还包括滑轨,滑轨固定于平台的上端面且滑轨与第二驱动杆平行设置,止挡滑动设置于滑轨,第二驱动件能够驱动止挡在滑轨上移动。
10.根据权利要求8所述的焊接变位机构,其特征在于,夹持机构设置有两个并相对的设置于平台的两端。
技术总结
本发明涉及焊接设备技术领域,本发明提出了一种焊接变位机构,包括底座、平台以及夹持机构,平台设置于底座的上端,夹持机构固定于平台的上端面并能够夹持工件,还包括顶升机构,平台与底座通过顶升机构相连,平台的下端面具有间隔设置的第一铰接点和第二铰接点,底座铰接于平台下端面的第一铰接点;顶升机构包括驱动组件以及连杆组件,连杆机构的一端铰接于底座的上端面,另一端铰接于平台下端面的第二铰接点,驱动组件能够驱动连杆组件以使平台绕第一铰接点转动。本发明通过夹持机构对工件进行装夹定位,通过顶升机构带动平台倾覆转动,从而改变爬坡焊缝的坡度,实现一次装夹多个部位的爬坡焊缝焊接,自动化程度高,减少人员操作流程。
技术研发人员:张英赏,刘波,王守帅,张国靖,苏海洲
受保护的技术使用者:济南二机床集团有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!