一种基于坐标映射算法的定位引导方法与流程
本发明属于电池模组的焊接,具体涉及一种基于坐标映射算法的定位引导方法。
背景技术:
1、在生产新能源汽车电池模组的过程中,电池组焊接是其中不可或缺的一部分,在模组焊接中,需要将ccs焊到电池模组的极柱上,这需要视觉系统来引导焊接系统进行精确的焊接。
2、在焊接工艺中,常规的工艺在焊接工位处上方的ccs已经将下方的极柱中心遮挡住了。导致视觉系统无法在焊接工位直接获取到极柱的完整图像。而如果更改工艺,在焊接工位中先移走ccs,待视觉系统取完图像后,再将ccs对齐放入。这就导致机构设计复杂,整体工位生产节拍过长。
3、为了解决问题,要求在焊接工位的前置工位中,视觉系统提前获取极柱以及mark点的图像信息,从而得到极柱的整体相对位置信息,在焊接工位再获取mark点的位置信息。将极柱坐标映射到焊接工位。
技术实现思路
1、本发明的目的在于提供一种基于坐标映射算法的定位引导方法,以解决新能源汽车电池生产工艺中的引导焊接问题;
2、为实现上述目的,本发明具体提供的技术方案为:一种基于坐标映射算法的定位引导方法,包括3d扫描工位,其按步骤对极柱和mark点图像进行扫描,输出极柱和mark点坐标;以及焊接工位,用于采集mark点图片并焊接ccs和极柱;
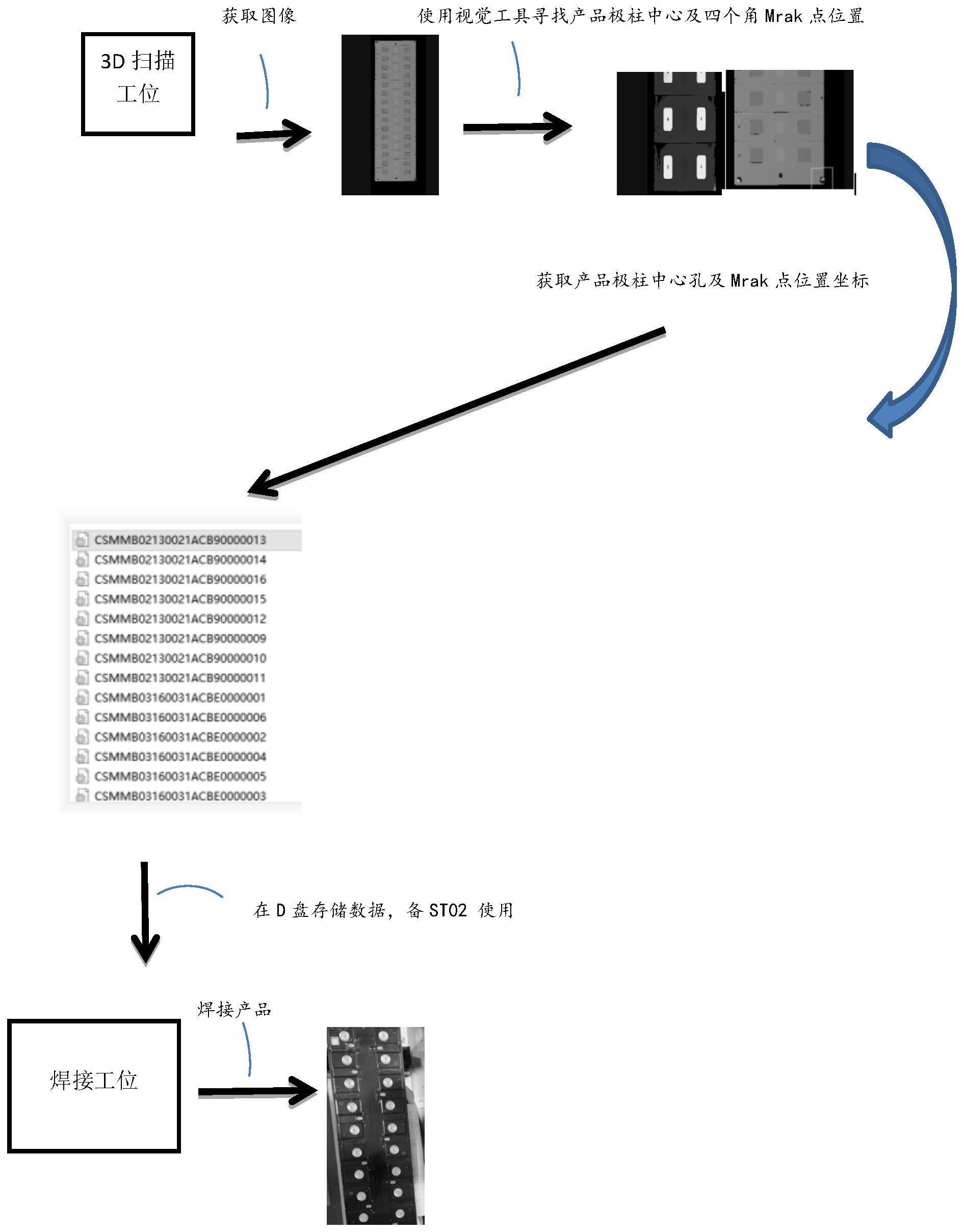
3、该3d扫描工位使用3d线扫按步骤获取图像,在对图像定位时采用视觉算法,得到产品极柱中心及四个角mrak点位置坐标,然后通过产品sn将坐标数据存到对应本地文档中,以待焊接工位调取使用;
4、在焊接工位流程中,robot挂载2d相机,通过视觉算法,依次获取四个mark点坐标,通过菲林片标定后,得到了在菲林片坐标系上的mark点坐标。
5、进一步的,调取st01存储在本地的文件,得到3d扫描的极柱位置坐标和mark点坐标。
6、进一步的,将3d中4个mrak点坐标与2d中4个mrak点坐标数据进行映射得到映射矩阵,通过矩阵转换,将3d扫描的极柱位置坐标转化到菲林片坐标系上;再通过robot定义的每个焊接位置以及进行ccd和焊接振镜标定;并获取焊接的原点坐标,得到robot每个焊接位置的焊接原点坐标,最后通过转换后的极柱坐标和每个焊接原点坐标进行处理,得到robot每个焊接位置的焊接坐标。
7、进一步的,在图像获取过程中步骤如下:
8、s1:选取一张带基准的大标定板;在4个mark点处分别进行相机取图标定;通过标定矩阵a1、a2、a3、a4得到每个mark点在标定板坐标系下的坐标,此处的坐标即a1、a2、a3、a4;
9、s2:机器人的数量为n,n>4,每个机器人焊接位置振镜需要焊四个极柱,确定所有的机器人焊接位置;
10、s3:在第1个机器人焊接位置处,与振镜做九点标定,得到振镜与相机图像坐标系的转换矩阵,即为b1矩阵;
11、s4:在第1个机器人焊接位置到第n个机器人焊接位置处,分别进行振镜原点低功率焊接后相机拍照得到n个焊接原点位,同时在每个焊接位,拍摄标定板图像,得到c1—cn共n个标定矩阵,n>4;
12、s5:通过b1和c1—cn矩阵,得到每个焊接原点在标定板坐标系下的坐标;
13、s6:在焊接工位的前置工位中,通过一台3d线扫扫描得到所有极柱的位置坐标和4个mark点坐标和,此处的坐标即b1、b2、b3、b4;
14、s7:通过在焊接工位得到的4个mark点坐标,a1、a2、a3、a4和前置工位得到的4个mark点坐标,即b1、b2、b3、b4,得到映射矩阵s;
15、s8:通过映射矩阵s,将前置工位得到的所有极柱坐标转换到标定板坐标系上;
16、s9:通过转换后的极柱坐标,和每个机器人焊接位置处的焊接原点坐标,得到每个极柱的焊接坐标;
17、s10:将焊接坐标传给振镜设备,进行焊接。
18、与现有技术相比,本发明的有益效果是:
19、1、本发明设计简单,避免了在焊接工位设计ccs的抓取和放置。可将这些工艺流程放置到其他工位中。
20、2、工位节拍变短,焊接工位只需拍完mark点就可得到极柱坐标来进行焊接;
21、3、灵活性变强,前置工位不要求一定是上一工位,在设置工艺流程中,具有较强的灵活性,可用于其他工位的其他需求。
技术特征:
1.一种基于坐标映射算法的定位引导方法,其特征在于:包括3d扫描工位,其按步骤对极柱和mark点图像进行扫描,输出极柱和mark点坐标;以及焊接工位,用于采集mark点图片并焊接ccs和极柱;
2.根据权利要求1所述的一种基于坐标映射算法的定位引导方法,其特征在于:调取st01存储在本地的文件,得到3d扫描的极柱位置坐标和mark点坐标。
3.根据权利要求1所述的一种基于坐标映射算法的定位引导方法,其特征在于:将3d中4个mrak点坐标与2d中4个mrak点坐标数据进行映射得到映射矩阵,通过矩阵转换,将3d扫描的极柱位置坐标转化到菲林片坐标系上;再通过robot定义的每个焊接位置以及进行ccd和焊接振镜标定;并获取焊接的原点坐标,得到robot每个焊接位置的焊接原点坐标,最后通过转换后的极柱坐标和每个焊接原点坐标进行处理,得到robot每个焊接位置的焊接坐标。
4.根据权利要求1所述的一种基于坐标映射算法的定位引导方法,其特征在于:在图像获取和定位过程中的步骤如下:
技术总结
本发明公开了一种基于坐标映射算法的定位引导方法,包括3D扫描工位,其按步骤对极柱和Mark点图像进行扫描,输出极柱和Mark点坐标;以及焊接工位,用于采集Mark点图片并焊接CCS和极柱;本发明设计简单,避免了在焊接工位设计CCS的抓取和放置。可将这些工艺流程放置到其他工位中。工位节拍变短,焊接工位只需拍完Mark点就可得到极柱坐标来进行焊接;灵活性变强,前置工位不要求一定是上一工位,在设置工艺流程中,具有较强的灵活性,可用于其他工位的其他需求。
技术研发人员:戴文壮,王振宇
受保护的技术使用者:无锡宇辉信息技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!