一种翻转自定位结构及工装夹具的制作方法
1.本技术涉及夹具技术领域,尤其涉及一种翻转自定位结构及工装夹具。
背景技术:
2.现有技术中为了提高塔式起重机的标准节的加工精度和效率,对标准节采用拼焊后进行加工。由于焊接后的标准节尺寸和重量较大,由此,在机床设备中通常采用卧式装夹的方式对标准节的四根主弦杆端部的孔面进行加工。加工过程中需要对标准节进行翻转,目前采用的翻转方式为多台龙门吊车辅助翻转,或者增设翻转变位机进行翻转。
3.其中,采用龙门吊车辅助翻转需要较大的操作空间,并且需要对标准节进行重新定位和装夹,进而会降低加工精度。采用翻转变位机进行翻转,由于翻转传动机构之间存在配合间隙,因此翻转后的标准节的位置精度不能精确控制,进而导致加工误差,严重时会使标准节无法使用。
技术实现要素:
4.本技术的目的在于提供一种翻转自定位结构及工装夹具,用以解决现有技术中存在的不足。
5.为达上述目的,第一方面,本技术提供了一种翻转自定位结构,包括基座、装夹筒、定位座及升降翻转模组;
6.所述升降翻转模组设置于所述基座;
7.所述装夹筒卧式设置于所述升降翻转模组,所述装夹筒用于装夹工件,所述装夹筒的一端设有定位部,所述定位部的外周面设有多个第一定位基准面;
8.所述定位座设置于所述基座及位于所述装夹筒的下方,所述定位座朝向所述定位部的一侧设有与所述第一定位基准面对应的第二定位基准面;
9.其中,所述升降翻转模组能够驱动所述装夹筒上升并翻转,以使其中一个所述第一定位基准面与所述第二定位基准面对应,当所述升降翻转模组驱动所述装夹筒下降时,所述第二定位基准面能够自动与对应的所述第一定位基准面形成面配合。
10.结合第一方面,在一种可能的实施方式中,所述装夹筒的两端分别设有一个所述定位部,所述定位座设有两个,两个所述定位座分别对应所述定位部布置。
11.结合第一方面,在一种可能的实施方式中,多个所述第一定位基准面沿所述定位部的周向均匀分布。
12.结合第一方面,在一种可能的实施方式中,设定所述第一定位基准面的数量为n,两相邻的所述第一定位基准面之间所呈的夹角为c,其中,c=180
°‑
360
°
/n,n≥2。
13.结合第一方面,在一种可能的实施方式中,所述定位部的外周具有多个侧壁面,每个所述侧壁面上设有至少一个第一定位基准块,所述第一定位基准块上形成有所述第一定位基准面。
14.结合第一方面,在一种可能的实施方式中,所述定位座朝向所述定位部的一侧设
有至少一个第二定位基准块,所述第二定位基准块上形成有所述第二定位基准面。
15.结合第一方面,在一种可能的实施方式中,所述定位座上还设有至少一定位组件,所述定位组件包括定位销及驱动件;
16.所述第二定位基准面设有导向孔,所述定位销插设于所述导向孔中;
17.所述驱动件设置于所述定位座内及与所述定位销连接;
18.其中,所述第一定位基准面对应所述定位销设有定位孔,所述驱动件能够驱动所述定位销插入所述定位孔中。
19.结合第一方面,在一种可能的实施方式中,所述升降翻转模组包括升降机构及翻转机构,所述升降机构设置于所述基座,所述翻转机构设置于所述升降机构,所述装夹筒卧式设置于所述翻转机构;
20.其中,所述升降机构能够驱动所述翻转机构和所述装夹筒一并升降,所述翻转机构能够驱动所述装夹筒绕自身轴线转动。
21.结合第一方面,在一种可能的实施方式中,所述翻转机构包括翻转座及设置于所述翻转座上的驱动电机和两个摩擦轮组;
22.所述装夹筒外周面设有翻转板,所述翻转板与所述摩擦轮组相抵接,所述驱动电机与其中一个所述摩擦轮组连接,所述驱动电机能够通过对应的所述摩擦轮组驱动所述装夹筒转动。
23.第二方面,本技术还提供了一种工装夹具,包括如上述第一方面提供的翻转自定位结构。
24.相比于现有技术,本技术的有益效果:
25.本技术提供了一种翻转自定位结构及工装夹具,其中,翻转自定位结构包括基座、装夹筒、定位座及升降翻转模组。通过装夹筒装夹工件,由升降翻转模组能够驱动装夹筒进行升降和翻转变位。升降翻转模组驱动装夹筒完成翻转后,可以使装夹筒定位部上的一个第一定位基准面与第二定位基准面对应,若装夹筒翻转的角度存在一定的误差,此时导致第一定位基准面与第二定位基准面存在一定的夹角,当升降翻转模组驱动装夹筒下降时,在装夹筒自身的重力作用下,会使第一定位基准面逐渐向第二定位基准面接触并靠近,最后第二定位基准面能够自动与对应的第一定位基准面形成面配合,完成装夹筒的自动校正和定位。
附图说明
26.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
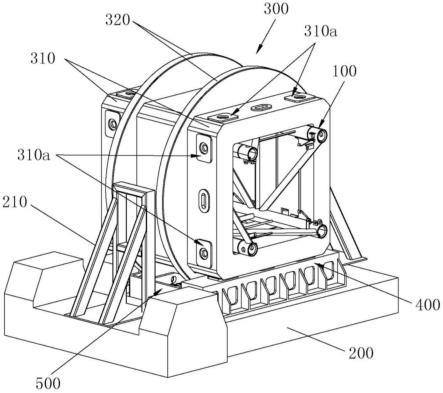
27.图1示出了本技术实施例提供的一种处于翻转状态的工装夹具的立体结构示意图;
28.图2示出了本技术实施例提供的一种完成翻转定位的工装夹具的立体结构示意图;
29.图3示出了图2所示工装夹具中装夹筒的立体结构示意图;
30.图4示出了图2所示工装夹具中定位座的立体结构示意图;
31.图5示出了本技术实施例提供的一种装夹筒与升降翻转模组的配合结构示意图;
32.图6示出了本技术实施例提供的一种升降翻转模组的立体结构示意图。
33.主要元件符号说明:
34.100-工件;200-基座;210-保护架;300-装夹筒;301-装夹腔;310-定位部;310a-第一定位基准面;311-第一定位基准块;312-定位孔;320-翻转板;400-定位座;400a-第二定位基准面;410-定位组件;411-定位销;412-驱动件;420-第二定位基准块;421-导向孔;500-升降翻转模组;510-升降机构;511-升降执行组件;512-导向轴;520-翻转机构;521-翻转座;5210-限位槽;522-驱动电机;523-摩擦轮组;5230-摩擦轮体;5231-转轴。
具体实施方式
35.下面详细描述本技术的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本技术,而不能理解为对本技术的限制。
36.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
37.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
38.在本技术中,除非另有明确的规定和限定,“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
39.在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
40.实施例一
41.请参阅图1及图2,本实施例提供了一种工装夹具,所述工装夹具用于装夹工件100,以便于机床设备对工件100进行加工。
42.在本实施例中,装夹的工件100选择为塔式起重机的标准节,工装夹具能够将标准节进行卧式装夹,以显露出标准节两端的待加工部位。
43.在本实施例中,工装夹具包括夹持固定结构及翻转自定位结构,其中,翻转自定位
结构包括基座200、装夹筒300、定位座400及升降翻转模组500。
44.基座200设置于地基上,升降翻转模组500设置于基座200上,升降翻转模组500可执行升降和翻转动作。
45.请一并参阅图3,装夹筒300卧式设置于升降翻转模组500,装夹筒300沿自身轴线设有装夹腔301,装夹腔301中设置有夹持固定结构,夹持固定结构用于将标准节定卧式定位在装夹筒300的装夹腔301中。由此,升降翻转模组500能够驱动装夹筒300带动标准节一并进行升降和翻转运动,其中,装夹筒300执行翻转运动是绕自身的轴线转动,并且升降翻转模组500能够控制装夹筒300转动的角度。
46.在一些实施例中,夹持固定结构可采用多个螺栓和多块压板配合实现对标准节的装夹定位。
47.进一步的,在本实施例中,装夹筒300的两端分别设有定位部310,定位部310的外周面设有多个第一定位基准面310a,其中,第一定位基准面310a为平面。
48.可选地,多个第一定位基准面310a沿定位部310的周向均匀分布。
49.在一些实施例中,设定第一定位基准面310a的数量为n,两相邻的第一定位基准面310a之间所呈的夹角为c,其中,c=180
°‑
360
°
/n,n≥2。
50.可以理解的,本实施例装夹的工件100为标准节,标准节为长方体的桁架结构,待加工的部位为四根主弦两端的面和销孔。标准节具有四个侧面,对应的在本实施例中,第一定位基准面310a的数量也设置有四个,即n=4,因此两相邻的第一定位基准面310a之间所呈的夹角c为90
°
。由此,当需要在标准节四个侧面的主弦杆依次加工销孔或端面时,可通过升降翻转模组500驱动装夹筒300间歇地依次转动90
°
进行切换。
51.可选地,定位部310设置为中空的正四棱柱结构,定位部310的四个侧面分别对应为四个第一定位基准面310a。
52.请参阅图1、图2、图3及图4,在本实施例中,定位座400设有两个,两个定位座400均设置于基座200上,两个定位座400分别与装夹筒300两端的定位部310对应,且定位座400位于装夹筒300对应的定位部310的下方。
53.为了更清楚的描述本技术的技术方案,以下对两个定位座400择一进行描述。在本实施例中,定位座400朝向定位部310的一侧设有第二定位基准面400a,第二定位基准面400a与第一定位基准面310a对应,且第二定位基准面400a能够与第一定位基准面310a形成面配合,以实现对装夹筒300的定位。
54.工装夹具实现翻转自定位的原理如下:
55.当标准节需切换另一侧面进行加工时,首先,升降翻转模组500驱动装夹筒300上升使得定位部310上对应的一个第一定位基准面310a与定位座400分离一定距离,以避免后续翻转时造成运动上的干涉;升降翻转模组500再驱动装夹筒300绕自身轴线翻转90
°
,进而转换为另一个第一定位基准面310a朝向基座200,使得该第一定位基准面310a与第二定位基准面400a对应,进而完成翻转变位。
56.接着,升降翻转模组500驱动装夹筒300下降,即装夹筒300向靠近基座200的方向运动,此时相对应的第一定位基准面310a和第二定位基准面400a相互靠近,最终第一定位基准面310a和第二定位基准面400a接触并贴合形成面配合。由此可知,通过面配合可限制装夹筒300的转动,进而使装夹筒300中的标准节待加工的一侧朝向加工机床的刀具,完成
定位,以等待加工。
57.可以理解的,由于升降翻转模组500在执行翻转动作的过程中,动力在机械结构的传递过程中存在一定的间隙,会存在一定的误差,使得装夹筒300翻转后第一定位基准面310a未能正对第二定位基准面400a,此时的第一定位基准面310a与第二定位基准面400a之间呈一定的夹角。因此,升降翻转模组500驱动装夹筒300下降时,第一定位基准面310a先与第二定位基准面400a为线接触,由装夹筒300自身的重力作用,装夹筒300继续下降的过程中,第一定位基准面310a与第二定位基准面400a逐渐靠近,使得第一定位基准面310a与第二定位基准面400a之间的夹角逐渐减少,最终第一定位基准面310a能够自动与第二定位基准面400a贴合,实现面接触,进而完成自动校正和定位。
58.请参阅图2、图3及图4,进一步的,定位座400上还设有至少一定位组件410。在本实施例中,每个定位座400上设有两个定位组件410,定位组件410用于限制装夹筒300在定位座400上滑动。
59.具体的,定位组件410包括定位销411及驱动件412。对应的在第二定位基准面400a设有导向孔421,定位销411插设于导向孔421中,驱动件412设置于定位座400内及与定位销411连接。
60.可选地,导向孔421中设有轴套,定位销411与轴套间隙配合,进而减少摩擦力,减少定位销411运动的阻力。
61.在一些实施例中,轴套可替换成直线轴承。
62.其中,第一定位基准面310a对应定位销411设有定位孔312,驱动件412能够驱动定位销411插入定位孔312中。
63.可选地,定位孔312为盲孔,避免定位销411插入装夹筒300的装夹腔301中。
64.可选地,定位孔312为锥形孔,以便于定位销411插入。
65.可选地,定位销411的端部设为椎体结构,顶部为钝头,以便于插入定位孔312中,同时避免损伤第一定位基准面310a。
66.在一些实施例中,驱动件412为弹簧,弹簧一端与定位销411抵接,另一端与导向孔421的底部抵接,由此,定位销411在弹簧的推动下能够伸出导向孔421。
67.在另一些实施例中,驱动件412为气缸。气缸的活塞杆端与定位销411连接,通过气缸的活塞杆驱动定位销411伸出导向孔421。
68.实施例二
69.请参阅图2、图3及图4,本实施例提供了一种工装夹具,本实施例是在上述实施例一的技术基础上做出的改进,相比于上述实施例一,区别之处在于:
70.在本实施例中,由于定位部310为四棱柱结构,因此定位部310的外周具有四个侧壁面,每个侧壁面上设有至少一个第一定位基准块311。本实施例中,以第一定位基准块311的数量为两个进行举例说明,当然也可以是三个、四个或其它数。
71.其中,两个第一定位基准块311的顶面共面,并共同形成为第一定位基准面310a。由此,加工时只需对两个第一定位基准块311的顶面进行铣削加工,无需对定位部310的所有侧壁面进行整面加工,减少加工难度,提高加工精度,进一步降低装夹筒300的加工成本。
72.定位座400朝向定位部310的一侧设有两个第二定位基准块420,两个第二定位基准块420分别与两个第一定位基准块311对应。两个第二定位基准块420的顶面共同形成第
二定位基准面400a。由此,加工时只需对两个第二定位基准块420的顶面进行铣削加工,无需对定位座400的整个上表面进行加工,减少加工难度,提高加工精度,进而提高定位精度,进一步降低定位座400的加工成本。
73.其中,第一定位基准块311上设有所述定位孔312,第二定位基准块420上设有所述导向孔421。
74.实施例三
75.请参阅图1、图5及图6,本实施例提供了一种工装夹具,本实施例是在上述实施例一或实施例二的技术基础上做出的改进,相比于上述实施例一或实施例二,区别之处在于:
76.在本实施例中,升降翻转模组500包括升降机构510及翻转机构520,升降机构510设置于基座200上,翻转机构520设置于升降机构510的输出端,装夹筒300卧式设置于翻转机构520上。
77.其中,升降机构510能够执行升降运动,由此升降机构510能够驱动翻转机构520和装夹筒300一并升降。翻转机构520能够输出旋转运动,因此翻转机构520能够驱动装夹筒300绕自身轴线转动,进而实现安装在装夹筒300中的标准节进行翻转变为。
78.翻转机构520包括翻转座521及设置于翻转座521上的驱动电机522和两个摩擦轮组523,摩擦轮组523具有一对摩擦轮体5230及连接该对摩擦轮体5230的转轴5231。驱动电机522通过减速器与其中一个摩擦轮组523中的转轴5231连接,由此,驱动电机522可驱动对应的摩擦轮体5230转动。
79.装夹筒300外周面对应的设有两个翻转板320,两个翻转板320沿装夹筒300的轴线设置,且间隔预设的距离。翻转板320为圆盘结构,翻转板320同时与两个摩擦轮组523中的摩擦轮体5230对应并相抵接。由此,驱动电机522能够通过对应的摩擦轮组523驱动装夹筒300绕自身轴线转动。
80.进一步的,翻转座521上设有两个限位槽5210,两个摩擦轮体5230分别设置于对应的限位槽5210中。由此,当两个翻转板320与摩擦轮体5230接触时,翻转板320也收容在对应的限位槽5210中,进而可限制装夹筒300的轴向运动。
81.可选地,限位槽5210的宽度与翻转板320的厚度相适配,进而提高轴向限位的精度。
82.在一些实施例中,限位槽5210的两侧布置有万向球轴承,万向球轴承与翻转板320的侧壁面为滚动配合,进而减少翻转板320转动的阻力,避免翻转板320磨损,延长使用寿命。
83.升降机构510包括升降执行组件511及导向轴512,其中,升降执行组件511和导向轴512均设置于基座200上,其中,升降执行组件511的输出端与翻转座521连接,用于驱动翻转座521升降。导向轴512贯穿翻转座521,导向轴512与翻转座521为间隙配合,以提高翻转座521升降的稳定性。
84.进一步的,升降执行组件511和导向轴512均设置有多个,其中,多个升降执行组件511为同步运动。多个升降执行组件511和多个导向轴512对应所述翻转座521均匀分布于基座200上,以提高翻转座521升降的稳定性。
85.可选地,升降执行组件511为油缸、气缸、直线电机、电动推杆、千斤顶或电机丝杆结构中的一种。
86.在一些实施例中,如图1所示,基座200的两侧还设有保护架210,保护架210可以避免装夹筒300掉落,提高装置的安全性。
87.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
88.尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1