一种基于机械臂的多轴激光焊接机的制作方法
1.本实用新型提供一种基于机械臂的多轴激光焊接机,属于焊接设备领域。
背景技术:
2.目前,焊接机器人都是通过机械臂端部设置有焊接机,现有的焊接接线材都是固定在机械臂上,且线材固定,在进行偏转调节时,整体线材靠近焊接点,不能够形成控制对应的管线的保护,且管线不能够形成架空设置,不便于维修更换,且现有的焊接头位置缺少照明设置,不能够在焊接头位置形成气氛保护。
3.公开号cn109986258a公开了一种自动焊接机械臂,包括焊接机械臂主体、底座、电动机、螺杆、滑板、固定块、凸板、转台、电动伸缩杆、距离传感器和速度传感器,焊接机械臂主体底部设置有底座,电动机一侧设置有螺杆,滑板底面中部安装有固定块,滑板顶端安装有转台,第一安装臂顶端安装有第二安装臂,电动伸缩杆底端连接有安装盘,焊枪一侧安装有距离传感器,距离传感器一侧安装有速度传感器,上述结构不能够在焊接位置形成气氛保护设置,且缺少照明结构。
技术实现要素:
4.本实用新型一种基于机械臂的多轴激光焊接机,提供的一种通过在焊接头端部形成高温气体的保护氛围,通过支撑杆伸缩形成线束的调节固定的单体机械臂焊接机。结构简单,使用方便。
5.本实用新型一种基于机械臂的多轴激光焊接机是这样实现的,本实用新型一种基于机械臂的多轴激光焊接机:包括机械臂、焊接总成,焊接总成置于机械臂上,机械臂底部通过回转底座固定,机械臂设置有六组驱动电机,且包括三组关节臂以及安装头,关节臂之间通过驱动电机连接,安装头上设置有横向和纵向两组驱动电机,焊接总成置于安装头上,且和安装头纵向设置的驱动电机输出轴对应连接,焊接总成包括安装座、焊接组件,安装座通过连接法兰和机械臂端部连接,且位于安装头的输出轴上,安装座为l形结构,且之间设置有支撑板,焊接逐渐置于安装座侧壁上,焊接组件包括焊接头、焊头座、气管连接头、照明灯具、控制阀,焊接组件一侧设置有焊接头,焊接头通过焊头座固定,焊接头上绕缠有螺旋管,螺旋管的出气口和焊接头对应,焊接组件上设置有控制阀,控制阀两侧设置有气管连接头,螺旋管通过软管和气管连接头连通,控制阀上设置有进气软管,焊接总成底部设置有照明灯具,照明灯具通过悬架固定置于焊接组件底部,且位于焊接头一侧,照明灯具预留外接电源线,焊接头上设置有送丝管线,关节臂上设置有支撑杆,支撑杆端部设置有导向架,电源线、气管、送丝管线和抱置于导向架上,导向架上设置有管线总成,电源线、气管、送丝管线对应和管线总成连接,支撑杆为伸缩杆组;
6.所述支撑杆组包括伸缩杆、丝杠电机、控制器、升降丝杆、居中套、安装座、悬置杆、测距传感器、支撑套,支撑套通过安装座置于关节臂上,支撑套两侧设置有悬置杆,悬置杆端部设置有测距传感器,支撑套内设置有居中套,升降丝杆对应置于居中套内,且延伸出支
撑套,支撑套顶部设置有法兰,丝杠电机螺接置于支撑套上,伸缩杆置于升降丝杆上,升降丝杆和丝杠电机和升降丝杆配合,伸缩杆顶部设置有支托板;
7.所述丝杠电机上设置有控制器,测距传感器和控制器连接,控制器和丝杠电机形成电控;
8.所述居中套为尼龙套,且和升降丝杆之间贴合导向;
9.所述照明灯具铰接置于悬架上;
10.所述控制阀为双通道阀组,两侧设置有气管连接头,两组气管连接头对应连接两组套置于焊接头外侧的螺旋管;
11.所述螺旋管为铜管绕卷形成,且口部设置有气嘴。
12.有益效果:
13.一、能够通过焊接头对螺旋管形成预热,提高内部气体的温度;
14.二、采用支撑杆进行线束调节,形成升降固定;
15.三、结构简单,使用方便。
附图说明
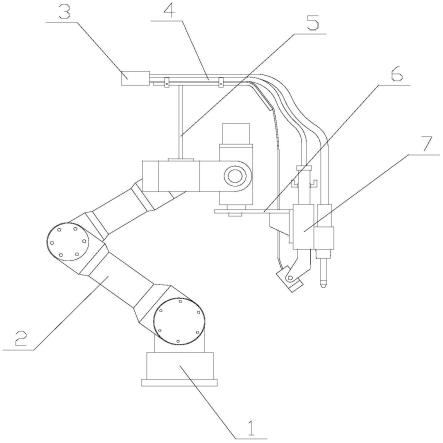
16.图1为本实用新型一种基于机械臂的多轴激光焊接机的结构示意图。
17.图2为本实用新型一种基于机械臂的多轴激光焊接机的焊接头的结构示意图。
18.图3为本实用新型一种基于机械臂的多轴激光焊接机的支撑杆的结构示意图。
19.附图中:
20.1、回转底座;2、机械臂;3、管线总成;4、导向架;5、支撑杆;6、安装座;7、焊接组件;8、悬架;9、照明灯具;10、螺旋管;11、焊接头;12、焊头座;13、气管连接头;14、控制阀;15、气管;50、伸缩杆;51、丝杠电机;52、控制器;53、升降丝杠;54、居中套;55、安装座;56、悬置杆;57、测距传感器;58、支撑套。
具体实施方式
21.下面结合附图对本实用新型进一步说明。
22.根据图1-3所示:本实用新型一种基于机械臂的多轴激光焊接机是这样实现的,本实用新型一种基于机械臂的多轴激光焊接机:包括机械臂2、焊接总成,焊接总成置于机械臂2上,机械臂2底部通过回转底座1固定,机械臂2设置有六组驱动电机,且包括三组关节臂以及安装头,关节臂之间通过驱动电机连接,安装头上设置有横向和纵向两组驱动电机,焊接总成置于安装头上,且和安装头纵向设置的驱动电机输出轴对应连接,焊接总成包括安装座66、焊接组件7,安装座66通过连接法兰和机械臂2端部连接,且位于安装头的输出轴上,安装座66为l形结构,且之间设置有支撑板,焊接逐渐置于安装座66侧壁上,焊接组件7包括焊接头11、焊头座12、气管15连接头13、照明灯具9、控制阀14,焊接组件7一侧设置有焊接头11,焊接头11通过焊头座12固定,焊接头11上绕缠有螺旋管10,螺旋管10的出气口和焊接头11对应,焊接组件7上设置有控制阀14,控制阀14两侧设置有气管15连接头13,螺旋管10通过软管和气管15连接头13连通,控制阀14上设置有进气软管,焊接总成底部设置有照明灯具9,照明灯具9通过悬架8固定置于焊接组件7底部,且位于焊接头11一侧,照明灯具9预留外接电源线,焊接头11上设置有送丝管线,关节臂上设置有支撑杆5,支撑杆5端部设置
有导向架4,电源线、气管15、送丝管线和抱置于导向架4上,导向架4上设置有管线总成3,电源线、气管15、送丝管线对应和管线总成3连接,支撑杆5为伸缩杆50组;
23.所述支撑杆5包括伸缩杆50、丝杠电机51、控制器52、升降丝杆、居中套54、安装座66、悬置杆56、测距传感器57、支撑套58,支撑套58通过安装座66置于关节臂上,支撑套58两侧设置有悬置杆56,悬置杆56端部设置有测距传感器57,支撑套58内设置有居中套54,升降丝杆对应置于居中套54内,且延伸出支撑套58,支撑套58顶部设置有法兰,丝杠电机51螺接置于支撑套58上,伸缩杆50置于升降丝杆上,升降丝杆和丝杠电机51和升降丝杆配合,伸缩杆50顶部设置有支托板;
24.所述丝杠电机51上设置有控制器52,测距传感器57和控制器52连接,控制器52和丝杠电机51形成电控;
25.所述居中套54为尼龙套,且和升降丝杆之间贴合导向;
26.所述照明灯具9铰接置于悬架8上;
27.所述控制阀14为双通道阀组,两侧设置有气管15连接头13,两组气管15连接头13对应连接两组套置于焊接头11外侧的螺旋管10;
28.所述螺旋管10为铜管绕卷形成,且口部设置有气嘴;
29.使用时,通过机械臂2进行驱动调节焊接头11的移动控制,使得安装座66调节偏转,通过焊接头11进行焊接,螺旋管10通过控制阀14和外部气源连接,形成保护气氛构建,通过螺旋管10对焊接头11位置对应的空气进行排出,形成整体的保护氛围,然后通过支撑杆5通过测距传感器57检查至安装底面的距离,当关节臂移动,形成悬置杆56的上下移动,通过丝杠电机51驱动升降丝杠53进行上下移动,调节导向架4的位置,对线束形成支托固定,照明装置便于对焊接位置进行观察识别,达到对线材进行高度固定的目的。
30.以上对本实用新型及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1