轮辋四枪焊自动取件装置的制作方法
1.本实用新型涉及轮辋自动取件领域,具体涉及轮辋四枪焊自动取件装置。
背景技术:
2.对于非自动化轮辋生产线来说,每台设备都需要人员来对其进行操作,设备运行状态及产品加工质量都靠操作人员监控和掌握。用工成本的不断上升,对可实现半自动化的岗位优化,可有效降低成本,增加盈利。
3.原操作方式存在以下几个缺点:
4.(1)在四枪焊焊接完成以后,需要操作人员手工取件,放置到托盘上装运到下一工序,需要人工成本。
5.(2)四枪焊焊接完成后工件,不能立刻冷却,操作人员在手工取件的过程中,易造成手部灼伤,存在安全隐患。
技术实现要素:
6.本实用新型的目的在于提供轮辋四枪焊自动取件装置。
7.为达此目的,本实用新型采用以下技术方案:
8.提供轮辋四枪焊自动取件装置,包括支撑架、水平移动机构和钩料机构,支撑架固定安装在地面上,水平移动机构固定安装在支撑架上,用于带动钩料机构进行水平移动,钩料机构固定安装在支撑架的滑座上,用于对轮毂进行勾住。
9.进一步的,水平移动机构为直线滑台。
10.进一步的,水平移动机构包括滑座、滑轨、旋转杆、旋转驱动机构和摆动杆,旋转杆的一端与支撑架的顶部铰接,另一端与摆动杆的一端铰接,摆动杆的另一端与滑座的顶部铰接,滑轨固定安装在支撑架上,滑座与滑轨滑动连接,旋转驱动机构固定安装在支撑架上,用于推动旋转杆进行旋转。
11.进一步的,旋转驱动机构包括电动推杆和推座,电动推杆通过连接架固定安装在支撑架上,推座固定安装在电动推杆的输出端上,推座与旋转杆滑动连接。
12.进一步的,推座的底部设置有推柱,旋转杆上开设有供推柱插入的条形滑槽。
13.进一步的,钩料机构包括推动气缸、推杆和支撑杆,支撑杆固定安装在支撑架的滑座上,推动气缸通过气缸座固定安装在支撑杆上,推杆固定安装在推动气缸的输出端上。
14.本实用新型的有益效果:该轮辋四枪焊自动取件装置,取件工位由自动化取代人工后,减少一个工人的用工成本,取件工位由自动化取代人工后,消除了人工取件所存在的安全隐患,取件工位由自动化取代人工后,工件直接由自动化装置送至传送带,比人工取件更贴合生产线节拍,提高了生产效率。
附图说明
15.为了更清楚地说明本实用新型实施例的技术方案,下面将对本实用新型实施例中
所需要使用的附图作简单地介绍。
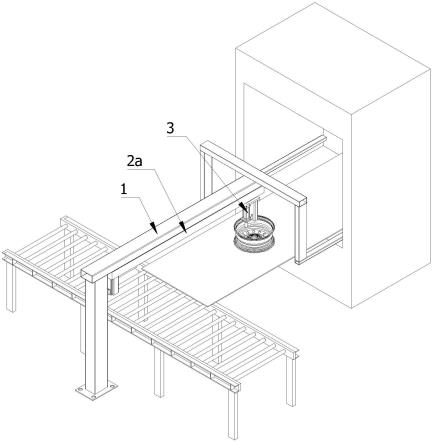
16.图1为本实用新型、实施例一的立体结构示意图;
17.图2为本实用新型、实施例二的立体结构示意图;
18.图3为旋转驱动机构的立体结构示意图一;
19.图4为旋转驱动机构的立体结构示意图二;
20.图5为钩料机构的立体结构示意图;
21.图中:
22.1、支撑架;
23.2a、直线滑台;2b、滑座;2c、滑轨;2d、旋转杆;2e、旋转驱动机构;2e1、电动推杆;2e2、推座;2e3、推柱;2f、摆动杆;
24.3、钩料机构;3a、推动气缸;3b、推杆;3c、支撑杆。
具体实施方式
25.下面结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
26.其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本实用新型的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸。
27.实施例一:
28.参照图1和图5所示的轮辋四枪焊自动取件装置,包括支撑架1、水平移动机构和钩料机构3,支撑架1固定安装在地面上,水平移动机构固定安装在支撑架1上,用于带动钩料机构3进行水平移动,钩料机构3固定安装在支撑架1的滑座上,用于对轮毂进行勾住。
29.水平移动机构为直线滑台2a。通过直线滑台2a带动钩料机构3进行水平移动。
30.钩料机构3包括推动气缸3a、推杆3b和支撑杆3c,支撑杆3c固定安装在支撑架1的滑座上,推动气缸3a通过气缸座固定安装在支撑杆3c上,推杆3b固定安装在推动气缸3a的输出端上。当被焊接完成后的轮辋被输送到钩料机构3的下方后,再通过控制器控制推动气缸3a进行工作,使得推动气缸3a向下推动推杆3b,使得推杆3b插入到轮辋内。
31.实施例原理:当被焊接完成后的轮辋被输送到钩料机构3的下方后,再通过控制器控制推动气缸3a进行工作,使得推动气缸3a向下推动推杆3b,使得推杆3b插入到轮辋内,再通过控制器控制水平移动机构进行运动,进而使得推杆3b水平推动轮辋进行运动,使得轮辋运动到有动力滚道上,再通过有动力滚道进行输送。
32.实施例二:
33.参照图2至图4所示,与实施例一不同之处在于,水平移动机构包括滑座2b、滑轨2c、旋转杆2d、旋转驱动机构2e和摆动杆2f,旋转杆2d的一端与支撑架1的顶部铰接,另一端与摆动杆2f的一端铰接,摆动杆2f的另一端与滑座2b的顶部铰接,滑轨2c固定安装在支撑架1上,滑座2b与滑轨2c滑动连接,旋转驱动机构2e固定安装在支撑架1上,用于推动旋转杆2d进行旋转。通过旋转驱动机构2e推动旋转杆2d进行旋转,使得旋转杆2d拉动摆动杆2f进行运动,摆动杆2f将拉动滑座2b沿着滑轨2c进行滑动,进而使得滑座2b带动钩料机构3进行水平移动,通过使用旋转拉动的方式,使得旋转驱动机构2e的工作距离缩短,进而降低了旋转驱动机构2e的购买成本,进而降低了设备的成本,并且旋转速度推动速度快于直线滑台
2a的移动速度,提高了设备的工作效率。
34.旋转驱动机构2e包括电动推杆2e1和推座2e2,电动推杆2e1通过连接架固定安装在支撑架1上,推座2e2固定安装在电动推杆2e1的输出端上,推座2e2与旋转杆2d滑动连接。通过控制器控制电动推杆2e1进行工作,使得电动推杆2e1推动推座2e2进行运动,进而使得推座2e2推动旋转杆2d进行旋转,并且通过这种直线推动的方式,在最开始推动速度快,在最后推动的速度慢,避免轮辋即将运动到有动力滚道上时,具有向前的惯性。
35.推座2e2的底部设置有推柱2e3,旋转杆2d上开设有供推柱2e3插入的条形滑槽。通过推动推柱2e3,且推柱2e3在条形滑槽内进行滑动,进而使得旋转杆2d进行旋转。
技术特征:
1.轮辋四枪焊自动取件装置,其特征在于,包括支撑架(1)、水平移动机构和钩料机构(3),支撑架(1)固定安装在地面上,水平移动机构固定安装在支撑架(1)上,用于带动钩料机构(3)进行水平移动,钩料机构(3)固定安装在支撑架(1)的滑座上,用于对轮毂进行勾住。2.根据权利要求1所述的轮辋四枪焊自动取件装置,其特征在于,水平移动机构为直线滑台(2a)。3.根据权利要求1所述的轮辋四枪焊自动取件装置,其特征在于,水平移动机构包括滑座(2b)、滑轨(2c)、旋转杆(2d)、旋转驱动机构(2e)和摆动杆(2f),旋转杆(2d)的一端与支撑架(1)的顶部铰接,另一端与摆动杆(2f)的一端铰接,摆动杆(2f)的另一端与滑座(2b)的顶部铰接,滑轨(2c)固定安装在支撑架(1)上,滑座(2b)与滑轨(2c)滑动连接,旋转驱动机构(2e)固定安装在支撑架(1)上,用于推动旋转杆(2d)进行旋转。4.根据权利要求3所述的轮辋四枪焊自动取件装置,其特征在于,旋转驱动机构(2e)包括电动推杆(2e1)和推座(2e2),电动推杆(2e1)通过连接架固定安装在支撑架(1)上,推座(2e2)固定安装在电动推杆(2e1)的输出端上,推座(2e2)与旋转杆(2d)滑动连接。5.根据权利要求4所述的轮辋四枪焊自动取件装置,其特征在于,推座(2e2)的底部设置有推柱(2e3),旋转杆(2d)上开设有供推柱(2e3)插入的条形滑槽。6.根据权利要求2或3所述的轮辋四枪焊自动取件装置,其特征在于,钩料机构(3)包括推动气缸(3a)、推杆(3b)和支撑杆(3c),支撑杆(3c)固定安装在支撑架(1)的滑座上,推动气缸(3a)通过气缸座固定安装在支撑杆(3c)上,推杆(3b)固定安装在推动气缸(3a)的输出端上。
技术总结
本实用新型涉及轮辋自动取件领域,具体涉及轮辋四枪焊自动取件装置,包括支撑架、水平移动机构和钩料机构,支撑架固定安装在地面上,水平移动机构固定安装在支撑架上,用于带动钩料机构进行水平移动,钩料机构固定安装在支撑架的滑座上,用于对轮毂进行勾住,该轮辋四枪焊自动取件装置,取件工位由自动化取代人工后,减少一个工人的用工成本,取件工位由自动化取代人工后,消除了人工取件所存在的安全隐患,取件工位由自动化取代人工后,工件直接由自动化装置送至传送带,比人工取件更贴合生产线节拍,提高了生产效率。提高了生产效率。提高了生产效率。
技术研发人员:夏贤尧 钱德发
受保护的技术使用者:芜湖飞驰汽车零部件技术有限公司
技术研发日:2022.05.13
技术公布日:2022/11/1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1