数控电液折弯机的制作方法
1.本技术涉及金属板材加工技术领域,尤其是涉及数控电液折弯机。
背景技术:
2.在金属板材的加工过程中,通常使用数控折弯机将冷态下的金属板材折弯成各种几何截面形状的工件。通过液压油进行操作的数控折弯机又称为数控电液折弯机。
3.相关技术中,数控电液折弯机包括机架,机架上设置有用于放置待加工板材的工作台,机架上滑动设置有上模具,机架上设置有用于驱使上模具移动将板材折弯的液压油缸。将待加工的金属板材放置在工作台上,通过液压油缸驱使上模具下移,进而将板材折弯。
4.针对上述中的相关技术,发明人发现,在加工时,工人每折弯一个板材后,都需要转身,然后弯腰放料,将板材堆叠起来,操作不方便。
技术实现要素:
5.为方便工人的操作,本技术提供数控电液折弯机。
6.本技术提供的数控电液折弯机采用如下的技术方案:
7.数控电液折弯机,包括机架,所述机架上滑动设置有承接板,所述承接板位于机架靠近进料的一侧,所述承接板的滑动方向平行于机架的高度方向,所述承接板上放置有收料板,所述收料板用于放置加工后的金属板材,所述机架底端转动设置有用于供工人脚踩的十字踏板,所述十字踏板的转动轴线垂直于承接板的滑动方向,所述机架上设置有用于使十字踏板转动时带动承接板朝向靠近或远离工作台的方向滑动的传动组件。
8.通过采用上述技术方案,通过脚踩十字踏板,十字踏板转动,通过传动组件带动承接板以及收料板移动至靠近工作台的位置,将每个折弯后的工件堆叠在收料板上,堆叠到一定程度后,脚踩十字踏板,通过传动组件使十字踏板带动承接板和收料板上的工件朝向远离工作台的方向滑动一定距离,以减小对加工的影响,同时可继续将折弯后的工件放置在收料板上,无需弯腰放料,将承接板滑动至机架底端后,将收料板从承接板上拉出,实现折弯后板材的收集,无需工人来回转身弯腰进行放料,从而在一定程度上方便了工人的操作。
9.优选的,所述传动组件包括转动设置在机架上的第一螺杆和设置在机架上的第一传动件,所述第一螺杆的转动轴线平行于承接板的滑动方向,所述承接板螺纹连接在第一螺杆上,所述第一传动件用于使十字踏板转动时带动第一螺杆转动。
10.通过采用上述技术方案,工人脚踩动十字踏板转动,通过第一传动件使十字踏板转动时带动第一螺杆转动,第一螺杆驱使承接板带动收料板朝向远离工作台的方向滑动,有助于使收料板带动折弯后的工件下移,便于板材的持续收集,减少工人因放料弯腰的可能,进而在一定程度上为工人的操作提供便利。
11.优选的,所述第一传动件包括套设在第一螺杆底端的第一蜗轮和设置在十字踏板
上的蜗杆,所述蜗杆位于十字踏板的轴线上,所述第一蜗轮和蜗杆啮合。
12.通过采用上述技术方案,脚踩动十字踏板,十字踏板转动带动蜗杆转动,蜗杆带动第一蜗轮转动,使得第一蜗轮带动第一螺杆转动,进而实现承接板带动收料板朝向靠近或远离工作台的方向滑动,便于工人放料。
13.优选的,所述机架上滑动设置有用于堆叠待加工金属板材的放置板,所述放置板的滑动方向平行于承接板的滑动方向,所述机架上设置有用于使十字踏板转动时带动放置板朝向靠近或远离工作台的方向滑动的第二传动件,当所述放置板朝向靠近工作台的方向滑动时,所述承接板朝向远离工作台的方向滑动。
14.通过采用上述技术方案,脚踩十字踏板,十字踏板转动,通过第二传动件带动放置板朝向靠近工作台的方向滑动,有助于向工人送料,减小工人来回取料的可能,同时减小工人因取料弯腰的可能,进一步为工人的操作提供了便利。
15.优选的,所述第二传动件包括转动在机架上的第二螺杆和套设在第二螺杆上的第二蜗轮,所述第二螺杆的转动轴线平行于放置板的滑动方向,所述放置板螺纹连接在第二螺杆上,所述第二蜗轮和蜗杆啮合,所述第二螺杆的螺距小于第一螺杆的螺距,所述第一螺杆的长度大于第二螺杆的长度。
16.通过采用上述技术方案,脚踩十字踏板,使十字踏板转动,十字踏板使得蜗杆转动,从而使得蜗杆带动第二蜗轮转动,第二蜗轮带动第二螺杆转动,第二螺杆驱使放置板朝向靠近工作台的方向滑动,便于工人进行取料;由于折弯后的工件厚度大于折弯前的板材,第二螺杆的螺距小于第一螺杆的螺距,使得十字踏板转动同样角度时,承接板相对于放置板移动的距离大,减小折弯后的工件堆叠过高对工人操作造成影响。
17.优选的,所述收料板靠近承接板的一侧设置有多个滚轮,所述滚轮滚动在承接板上,所述承接板上设置有用于使收料板和承接板相对固定的固定件。
18.通过采用上述技术方案,滚轮的设置有助于将收料板从承接板上滑出,为折弯后工件的收集提供一定便利,同时节省人力。
19.优选的,所述固定件包括设置在收料板上的挂柱和转动设置在承接板上的挂扣,所述挂扣和挂柱挂接配合。
20.通过采用上述技术方案,转动挂扣,使挂扣和挂柱挂接配合,实现承接板和收料板之间的相对固定,在承接板上下滑动过程中,有助于减小收料板发生晃动或滑动的可能,使折弯后工件不易从收料板上掉落。
21.优选的,所述收料板的四侧均设置有挡杆,所述挡杆内滑动设置有限定杆,所述限定杆的滑动方向平行于承接板的滑动方向,所述限定杆上设置有用于使限定杆和挡杆相对固定的锁紧件。
22.通过采用上述技术方案,挡杆和限定杆对收料板上折弯后的工件进行一定的限位,朝向远离挡杆的方向滑动限定杆,通过锁定件将挡杆和限定杆相对固定,有助于对更多折弯后的工件进行限位,以减小折弯后的工件从收料板上掉落的可能。
23.优选的,所述锁紧件包括设置在限定杆上的弹性弧形块,所述挡杆远离收料板一端的内壁上开设有用于和弹性弧形块卡接配合的卡孔。
24.通过采用上述技术方案,朝向远离挡杆的方向滑动限定杆,直至限定杆上的弹性弧形块和卡孔卡接,进而实现挡杆和限定杆的相对固定,有助于对收料板上折弯后的工件
进行限位,减小工件掉落的可能。
25.优选的,所述承接板远离机架的一侧设置有斜板,所述斜板远离承接板的一侧用于和地面抵接。
26.通过采用上述技术方案,斜板的设置有助于将收料板平稳地从承接板上滑动至地面,方便工人的操作,同时便于折弯后工件平稳的运输。
27.综上所述,本技术包括以下至少一种有益技术效果:
28.通过脚踩十字踏板,十字踏板转动,通过传动组件带动承接板以及收料板移动至靠近工作台的位置,将每个折弯后的工件堆叠在收料板上,堆叠到一定程度后,脚踩十字踏板,通过传动组件使十字踏板带动承接板和收料板上的工件朝向远离工作台的方向滑动一定距离,此时可继续将折弯后的工件放置在收料板上,无需弯腰放料,将承接板滑动至机架底端后,将收料板从承接板上拉出,实现折弯后板材的收集,无需工人来回转身弯腰进行放料,从而在一定程度上方便了工人的操作;
29.脚踩十字踏板,十字踏板转动,通过第二传动件带动放置板朝向靠近工作台的方向滑动,有助于向工人送料,减小工人来回取料的可能,同时减小工人因取料弯腰的可能,进一步为工人的操作提供了便利。
附图说明
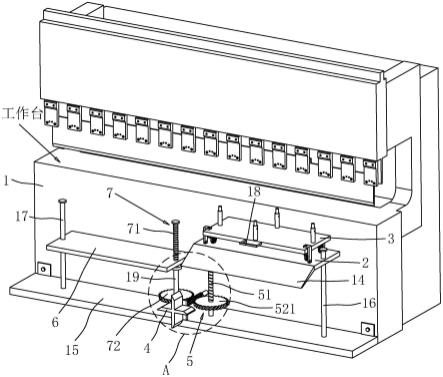
30.图1是本技术实施例的整体结构示意图。
31.图2是图1中a部分的放大图。
32.图3是本技术实施例的局部结构爆炸图。
33.附图标记说明:1、机架;2、承接板;3、收料板;4、十字踏板;5、传动组件;51、第一螺杆;52、第一传动件;521、第一蜗轮;522、蜗杆;6、放置板;7、第二传动件;71、第二螺杆;72、第二蜗轮;8、滚轮;9、固定件;91、挂柱;92、挂扣;10、挡杆;11、限定杆;12、弹性弧形块;13、卡孔;14、斜板;15、底板;16、第一导向杆;17、第二导向杆;18、把手;19、连接杆;20、限位块。
具体实施方式
34.以下结合附图1-3对本技术作进一步详细说明。
35.本技术实施例公开数控电液折弯机。参照图1和图3,数控电液折弯机包括机架1,机架1靠近进料的一侧通过螺钉连接有底板15,底板15上固定连接有第一导向杆16,第一导向杆16的长度方向平行于机架1的高度方向,第一导向杆16上滑动套设有承接板2,底板15远离第一导向杆16的一侧固定连接有第二导向杆17,第二导向杆17的长度方向平行于第一导向杆16的长度方向,第二导向杆17上滑动套设有放置板6,承接板2和放置板6的滑动方向平行于机架1的高度方向,承接板2和放置板6位于第一导向杆16和第二导向杆17之间,放置板6用于堆叠待加工的金属板材,承接板2上放置有收料板3,收料板3用于放置加工后的金属板材,收料板3靠近承接板2的一侧固定安装有多个滚轮8,在本实施例中,滚轮8为万向轮,滚轮8设置有四个,且位于收料板3四角,滚轮8滚动在承接板2上,承接板2上设置有用于使收料板3和承接板2相对固定的固定件9,承接板2远离机架1的一侧固定连接有斜板14,斜板14远离承接板2的一侧用于和地面抵接,收料板3远离机架1的一侧固定连接有把手18,便于工人拉动收料板3移动。
36.参照图1和图3,底板15上固定连接有支板,支板上转动设置有用于供工人脚踩的十字踏板4,十字踏板4的纵截面为是十字形,十字踏板4的转动轴线平行于板材进料方向,十字踏板4的转轴位于十字踏板4的中心线上,十字踏板4位于放置板6和承接板2之间,底板15上设置有用于使十字踏板4转动时带动承接板2朝向靠近或远离工作台的方向滑动的传动组件5,底板15上设置有用于使十字踏板4转动时带动放置板6朝向靠近或远离工作台的方向滑动的第二传动件7,当放置板6朝向靠近工作台的方向滑动时,承接板2朝向远离工作台的方向滑动,当放置板6朝向远离工作台的方向滑动时,承接板2朝向靠近工作台的方向滑动。
37.工作时,通过固定件9使收料板3和承接板2相对固定,踩动十字踏板4,十字踏板4转动,通过传动组件5带动承接板2和承接板2上的收料板3滑动至靠近工作台,同时通过第二传动件7带动放置板6滑动至远离工作台的一侧,将待加工的金属板材堆叠在放置板6上,顶层的待加工金属板材低于工作台表面,以减小对工人操作的影响;工人通过拿取放置板6上的金属板材进行折弯,折弯后的工件,放置在收料板3上,在加工一段时间后,踩动十字踏板4反向转动,通过传动组件5使承接板2带动收料板3上折弯后的工件朝向远离工作台的方向移动,以便于工人继续放置折弯后的工件,无需弯腰操作;通过第二传动件7使放置板6上的待加工金属板材朝向靠近工作台的方向上移,以便于工人拿取金属板材,以此往复,继续加工;当放置板6上的待加工金属板材加工完毕,放置板6滑动至靠近工作台,承接板2带动收料板3移动至靠近底板的一侧,此时斜板14和地面抵接,拉动把手18,使收料板3沿斜板14下滑至地面,进而实现折弯后工件的收集,无需工人来回转身弯腰进行取料和放料,在一定程度上方便了工人的操作。
38.参照图1和图2,为便于使十字踏板4转动时带动承接板2滑动,传动组件5包括转动设置在底板15上的第一螺杆51和设置在底板15上的第一传动件52,第一螺杆51的转动轴线平行于承接板2的滑动方向,承接板2远离第一导向杆16的一侧螺纹连接在第一螺杆51上,第一传动件52用于使十字踏板4转动时带动第一螺杆51转动,第一传动件52包括固定套设在第一螺杆51底端的第一蜗轮521和固定连接在十字踏板4轴线位置的蜗杆522,蜗杆522转动穿设在支板上,第一蜗轮521和蜗杆522啮合。
39.当踩动十字踏板4转动时,十字踏板4转动带动蜗杆522转动,蜗杆522带动第一蜗轮521转动,第一蜗轮521带动第一螺杆51转动,使得第一螺杆51带动承接板2滑动,实现承接板2带动收料板3朝向靠近或远离工作台的方向滑动,以便于工人放料,一定程度上方便了工人的操作。同时蜗杆522和第一蜗轮521之间的啮合具有自锁的功能,以便于将第一螺杆51转动并固定至所需位置。
40.参照图1和图2,为便于使十字踏板4转动时带动放置板6滑动,底板15上转动设置有连接杆19,第二传动件7包括固定连接在连接杆19上的第二螺杆71和固定套设在连接杆19底端的第二蜗轮72,第二螺杆71通过连接杆19转动在底板15上,第二螺杆71的转动轴线平行于放置板6的滑动方向,放置板6远离第二导向杆17的一侧螺纹连接在第二螺杆71上,第二螺杆71的螺距小于第一螺杆51的螺距,第一螺杆51的长度大于第二螺杆71的长度,第二螺杆71的底端高于第一螺杆51的底端,第二蜗轮72和蜗杆522啮合,蜗杆522位于第一蜗轮521和第二蜗轮72之间,连接杆19和第二螺杆71之间固定连接有限位块20,以减小放置板6滑动至连接杆19上的可能。
41.当踩动十字踏板4转动时,十字踏板4转动带动蜗杆522转动,蜗杆522带动第二蜗轮72转动,第二蜗轮72带动连接杆19和第二螺杆71转动,从而使得第二螺杆71带动放置板6朝向靠近或远离工作台的方向滑动,以便于工人拿取待加工的金属板材,为工人的操作提供便利。
42.参照图3,为便于使收料板3和承接板2相对固定,固定件9包括固定连接在收料板3相对两侧的挂柱91和转动设置在承接板2上的挂扣92,两侧挂柱91的排列方向垂直于十字踏板4的转动轴线,挂扣92的转动轴线平行于十字踏板4的转动轴线,挂扣92和挂柱91挂接配合。
43.当需要使收料板3和承接板2相对固定时,朝向靠近挂柱91的方向转动挂扣92,使挂扣92和挂柱91挂接配合,从而实现收料板3和承接板2的相对固定,以减小收料板3和承接板2之间出现不必要的滑动;当需要将收料板3从承接板2上滑至地面时,朝向远离挂柱91的方向转动挂扣92,使挂扣92从挂柱91上取下,即可拉动把手18滑动收料板3。
44.参照图3,收料板3的四侧均固定连接有挡杆10,挡杆10内滑动设置有限定杆11,限定杆11的滑动方向平行于承接板2的滑动方向,限定杆11上设置有用于使限定杆11和挡杆10相对固定的锁紧件,锁紧件包括固定连接在限定杆11靠近挡杆10一端的弹性弧形块12,在本实施例中,弹性弧形块12为橡胶弧形块,在其他实施例中,橡胶弧形块可替换为塑胶弧形块;挡杆10远离收料板3一端的内壁上开设有用于和弹性弧形块12卡接配合的卡孔13。在其他实施例中,锁定件可替换为螺纹穿设在挡杆10上的螺栓,螺栓和限定杆11的外壁抵接,采用螺栓抵紧限定杆11,同样可实现挡杆10和限定杆11之间的相对固定。
45.将折弯后的工件放置在收料板3上,四侧的挡杆10对工件具有一定的限位作用,以减小工件堆叠不稳从收料板3上滑落的可能,同时随着承接板2带动收料板3下移以及收料板3上的工件增多,朝向远离挡杆10的方向滑动限定杆11,将限定杆11滑动至所需位置,限定杆11上的弹性弧形块12和卡孔13卡接,实现限定杆11和挡杆10的相对固定,有助于对更多的工件进行限位,以减小折弯后的工件从收料板3上掉落的可能。
46.本技术实施例的实施原理为:工作时,朝向靠近挂柱91的方向转动挂扣92,使挂扣92和挂柱91挂接配合,实现收料板3和承接板2相对固定,接着踩动十字踏板4转动,十字踏板4带动蜗杆522转动,蜗杆522带动第一蜗轮521转动,使第一螺杆51带动承接板2上移,同时蜗杆522带动第二蜗轮72转动,使得第二螺杆71带动放置板6下移;将承接板2滑动至第一螺杆51顶端的位置,此时挡杆10低于工作台表面,放置板6滑动至第二螺杆71的底端位置,接着将待加工的金属板材堆叠在放置板6上,顶层的待加工金属板材低于工作台表面;然后工人通过拿取放置板6上的金属板材进行折弯,折弯后的工件,放置在收料板3上,挡杆10对折弯后的工件进行限位,减小工件堆放不稳掉落的可能。
47.在加工一段时间后,放置板6上的待加工金属板材使用了一部分,收料板3上折弯后的工件堆叠了一定高度,踩动十字踏板4反向转动,蜗杆522带动第一蜗轮521转动,使第一螺杆51带动承接板2下移,以便于工人继续放置折弯后的工件,无需弯腰操作,使工件不易对工人的操作造成影响;同时蜗杆522带动第二蜗轮72转动,使得第二螺杆71带动放置板6上移,放置板6带动待加工的板材向上移,以便于工人拿取金属板材,朝向远离挡杆10的方向滑动限定杆11,使限定杆11上的弹性弧形块12和卡孔13卡接,有助于对更多的工件进行限位,以此往复,继续加工;由于待加工的金属板材堆叠厚度小于折弯后工件堆叠的厚度,
第一螺杆51的螺距大于第二螺杆71的螺距,十字踏板4转动相同角度,承接板2的移动距离大于放置板6的移动距离,以便于工人进行取料和放料。
48.当放置板6上的待加工金属板材加工完毕,放置板6滑动至第二螺杆71靠近工作台的一侧,承接板2带动收料板3移动至第一螺杆51靠近底板15的一侧,此时斜板14和地面抵接,接着朝向远离挂柱91的方向转动挂扣92,将挂扣92从挂柱91上取下,朝向远离机架1的方向拉动把手18,使滚轮8带动收料板3沿斜板14滑动至地面,进而实现折弯后工件的收集,无需工人来回转身弯腰进行取料和放料,在一定程度上方便了工人的操作。
49.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1