一种XYθ对位平台的制作方法
一种xy
θ
对位平台
技术领域
1.本实用新型涉及精密对位平台技术领域,具体涉及一种xyθ对位平台。
背景技术:
2.基于机器视觉的精密对位系统结构复杂,集成了精密机械技术、光学系统/图像处理技术/智能控制技术等多项技术。精密机械工作平台是精密机械技术的重要组成部分,也是精密对位系统中的关键子系统,它对组装对位设备完成精确的器件对位起着至关重要的作用。
3.现有xyθ对位平台,θ是独立的转动轴,可以旋转大角度,缺点是平台的叠加性造成了误差的叠加放大,精度不易保证;随着平板显示技术迅猛发展,平板展示产品对其加工设备精度的要求也不断提高,xyθ平台大多不被精密对位应用场合所应用;转而常采用xxy工作平台进行精密对位,“xxy”在日本常用名称为“uvw”,xxy就是两个x方向的轴向,搭配一个y方向轴向,剩余一轴采用自由轴,它的出现用来取代传统的xyθ的应用,不同于传统的xyθ的结构,整体高度有效降低,提高了机台空间的利用率,但xxy工作平台的构造比较复杂、需要配套专用的复杂算法达到旋转而不容易设计,造价比较昂贵,不利于节省生产成本。
技术实现要素:
4.为了克服现有技术中存在的缺点和不足,本实用新型的目的在于提供一种xyθ对位平台。
5.本实用新型的目的通过下述技术方案实现:一种xyθ对位平台,包括安装基座、x轴轴向设置于安装基座的x轴滑动机构、通过x轴滑动机构与安装基座滑动连接的第一滑动座、固定安装于安装基座并用于驱动第一滑动座沿x轴轴向滑动的x轴驱动调节机构、y轴轴向设置于第一滑动座的y轴滑动机构、通过y轴滑动机构与第一滑动座滑动连接的第二滑动座、固定安装于第一滑动座并用于驱动第二滑动座沿y轴轴向滑动的y轴驱动调节机构、旋转设置于第二滑动座上方的旋转座、以及固定安装于第二滑动座的中部并用于驱动旋转座旋转的旋转驱动调节机构,所述旋转驱动调节机构依次穿设于所述第二滑动座、第一滑动座以及安装基座。
6.优选的,所述x轴滑动机构包括x轴轴向固定设置于所述安装基座的x轴滑轨、以及与x轴滑轨滑动连接的第一滑块,所述第一滑动座与第一滑块固定连接;所述y轴滑动机构包括y轴轴向固定设置于所述第一滑动座的y轴滑轨、以及与y轴滑轨滑动连接的第二滑块,所述第二滑动座与第二滑块固定连接。
7.优选的,所述x轴驱动调节机构包括固定安装于安装基座的第一丝杆步进电机、以及与第一丝杆步进电机的螺杆端螺纹连接的第一丝杆螺母,所述第一丝杆螺母的外侧壁固定连接于第一滑动座;所述y轴驱动调节机构包括固定安装于第二滑动座的第二丝杆步进电机、以及与第二丝杆步进电机的螺杆端螺纹连接的第二丝杆螺母,所述第二丝杆螺母的外侧壁固定连接于第一滑动座。
8.优选的,所述第一丝杆步进电机和第二丝杆步进电机均为贯通轴式丝杆步进电机。
9.优选的,所述安装基座连接有第一连接座,所述第一丝杆步进电机通过所述第一连接座与所述安装基座固定连接,所述第二滑动座连接有第二连接座,所述第二丝杆步进电机通过所述第二连接座与所述第二滑动座固定连接。
10.优选的,所述旋转驱动调节机构包括固定安装于所述第二滑动座的中部的旋转驱动电机、以及与旋转驱动电机的输出端连接的减速器,所述减速器的输出端与旋转座固定连接,所述旋转驱动电机依次穿设于所述第二滑动座、第一滑动座以及安装基座。
11.优选的,所述第二滑动座的底部连接有电机连接座,所述旋转驱动电机通过所述电机连接座与所述第二滑动座固定连接。
12.优选的,所述电机连接座的内侧开设有容置卡槽,所述旋转驱动电机的上端盖卡设于电机连接座的容置卡槽并通过螺栓与所述容置卡槽固定连接。
13.优选的,所述旋转驱动电机为步进电机,所述减速器为谐波减速器,所述减速器的波发生器与旋转驱动电机固定连接,所述减速器的刚轮与旋转座固定连接。
14.本实用新型的有益效果在于:本实用新型的xyθ对位平台,将安装基座、x轴滑动机构、第一滑动座、x轴驱动调节机构、y轴滑动机构、第二滑动座、y轴驱动调节机构、旋转座和旋转驱动调节机构集中一起,结构紧凑、简单,且旋转驱动调节机构依次穿设于第二滑动座、第一滑动座以及安装基座,极大程度地缩小了xyθ对位平台的高度和宽度,避免了传统的xyθ对位平台的叠加性造成整体高度高而精度不易保证的问题;使用时,通过x轴驱动调节机构驱动第一滑动座沿x轴轴向滑动调节,通过y轴驱动调节机构驱动第二滑动座沿y轴轴向滑动调节,通过旋转驱动调节机构驱动旋转座旋转,避免了采用现有的xxy工作平台而构造比较复杂、需要配套专用的复杂算法达到旋转而不容易设计、造价比较昂贵,节省生产成本。
附图说明
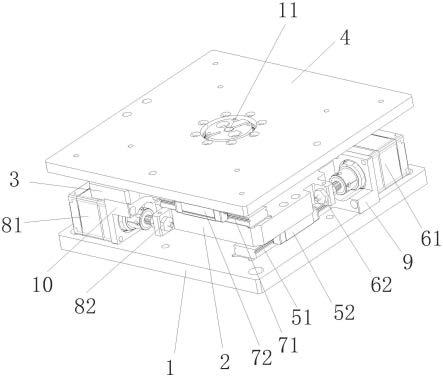
15.图1是本实用新型的结构示意图;
16.图2是本实用新型另一视角的结构示意图;
17.图3是本实用新型又一视角的结构示意图;
18.图4是本实用新型的分解结构示意图。
19.附图标记为:1、安装基座;2、第一滑动座;3、第二滑动座;4、旋转座;5、x轴滑动机构;51、x轴滑轨;52、第一滑块;6、x轴驱动调节机构;61、第一丝杆步进电机;62、第一丝杆螺母;7、y轴滑动机构;71、y轴滑轨;72、第二滑块;8、y轴驱动调节机构;81、第二丝杆步进电机;82、第二丝杆螺母;9、第一连接座;10、第二连接座;11、旋转驱动电机;12、减速器;13、电机连接座;14、容置卡槽;15、x轴感应件;16、y轴感应件;17、旋转感应件;18、x轴位移传感组件;19、y轴位移传感组件;20、旋转位移传感组件。
具体实施方式
20.为了便于本领域技术人员的理解,下面结合实施例及附图对本实用新型作进一步的说明,实施方式提及的内容并非对本实用新型的限定。
21.如图1-4所示,一种xyθ对位平台,包括安装基座1、x轴轴向设置于安装基座1的x轴滑动机构5、通过x轴滑动机构5与安装基座1滑动连接的第一滑动座2、固定安装于安装基座1并用于驱动第一滑动座2沿x轴轴向滑动的x轴驱动调节机构6、y轴轴向设置于第一滑动座2的y轴滑动机构7、通过y轴滑动机构7与第一滑动座2滑动连接的第二滑动座3、固定安装于第一滑动座2并用于驱动第二滑动座3沿y轴轴向滑动的y轴驱动调节机构8、旋转设置于第二滑动座3上方的旋转座4、以及固定安装于第二滑动座3的中部并用于驱动旋转座4旋转的旋转驱动调节机构,所述旋转驱动调节机构依次穿设于所述第二滑动座3、第一滑动座2以及安装基座1。
22.该xyθ对位平台,将安装基座1、x轴滑动机构5、第一滑动座2、x轴驱动调节机构6、y轴滑动机构7、第二滑动座3、y轴驱动调节机构8、旋转座4和旋转驱动调节机构集中一起,结构紧凑、简单,且旋转驱动调节机构依次穿设于第二滑动座3、第一滑动座2以及安装基座1,极大程度地缩小了xyθ对位平台的高度和宽度,避免了传统的xyθ对位平台的叠加性造成整体高度高而精度不易保证的问题;使用时,通过x轴驱动调节机构6驱动第一滑动座2沿x轴轴向滑动调节,通过y轴驱动调节机构8驱动第二滑动座3沿y轴轴向滑动调节,通过旋转驱动调节机构驱动旋转座4旋转,避免了采用现有的xxy工作平台而构造比较复杂、需要配套专用的复杂算法达到旋转而不容易设计、造价比较昂贵等问题,节省生产成本。进一步地,所述旋转驱动调节机构依次穿设于所述第二滑动座3的中部、第一滑动座2的中部以及安装基座1的中部。
23.在本实施例中,所述x轴滑动机构5包括x轴轴向固定设置于所述安装基座1的x轴滑轨51、以及与x轴滑轨51滑动连接的第一滑块52,所述第一滑动座2与第一滑块52固定连接;所述y轴滑动机构7包括y轴轴向固定设置于所述第一滑动座2的y轴滑轨71、以及与y轴滑轨71滑动连接的第二滑块72,所述第二滑动座3与第二滑块72固定连接。
24.采用上述技术方案,x轴滑轨51限制第一滑块52仅x轴轴向滑动,y轴滑轨71限制第二滑块72仅y轴轴向滑动,使用时,x轴驱动调节机构6驱动第一滑动座2沿x轴轴向滑动,y轴驱动调节机构8驱动第二滑动座3沿y轴轴向滑动,避免滑动时方向存在偏差而影响精密对位效果。
25.在本实施例中,所述x轴驱动调节机构6包括固定安装于安装基座1的第一丝杆步进电机61、以及与第一丝杆步进电机61的螺杆端螺纹连接的第一丝杆螺母62,所述第一丝杆螺母62的外侧壁固定连接于第一滑动座2;所述y轴驱动调节机构8包括固定安装于第二滑动座3的第二丝杆步进电机81、以及与第二丝杆步进电机81的螺杆端螺纹连接的第二丝杆螺母82,所述第二丝杆螺母82的外侧壁固定连接于第一滑动座2。
26.采用上述技术方案,通过第一丝杆步进电机61与第一丝杆螺母62配合,以驱动第一滑动座2滑动;通过第二丝杆步进电机81与第二丝杆螺母82配合,以驱动第二滑动座3滑动,结构简单,控制方便。
27.在本实施例中,所述第一丝杆步进电机61和第二丝杆步进电机81均为贯通轴式丝杆步进电机。
28.采用上述技术方案,有利于实现精准驱动,改善精密对位效果。
29.在本实施例中,所述安装基座1连接有第一连接座9,所述第一丝杆步进电机61通过所述第一连接座9与所述安装基座1固定连接;所述第二滑动座3连接有第二连接座10,所
述第二丝杆步进电机81通过所述第二连接座10与所述第二滑动座3固定连接。
30.采用上述技术方案,提高第一丝杆步进电机61的安装稳固性和结构紧凑性,提高第二丝杆步进电机81的安装稳固性和结构紧凑性;实现第一丝杆步进电机61驱动时第一滑动座2相对于安装基座1滑动,第二丝杆步进电机81驱动时第二滑动座3相对于安装基座1滑动。
31.在本实施例中,所述旋转驱动调节机构包括固定安装于所述第二滑动座3的中部的旋转驱动电机11、以及与旋转驱动电机11的输出端连接的减速器12,所述减速器12的输出端与旋转座4固定连接,所述旋转驱动电机11依次穿设于所述第二滑动座3、第一滑动座2以及安装基座1。
32.采用上述技术方案,减速器12与旋转驱动电机11的输出端连接,提高转动稳定性,避免旋转驱动电机11驱动旋转座4转动过猛而导致对位产品异位。
33.在本实施例中,所述第二滑动座3的底部连接有电机连接座13,所述旋转驱动电机11通过所述电机连接座13与所述第二滑动座3固定连接。
34.采用上述技术方案,提高旋转驱动电机11的安装稳固性和结构紧凑性。
35.在本实施例中,所述电机连接座13的内侧开设有容置卡槽14,所述旋转驱动电机11的上端盖卡设于电机连接座13的容置卡槽14并通过螺栓与所述容置卡槽14固定连接。
36.采用上述技术方案,结构更紧凑,有利于缩小xyθ对位平台的高度,更有利于避免传统的xyθ对位平台的叠加性造成整体高度高而精度不易保证的问题。
37.在本实施例中,所述旋转驱动电机11为步进电机,所述减速器12为谐波减速器12,所述减速器12的波发生器与旋转驱动电机11固定连接,所述减速器12的刚轮与旋转座4固定连接。
38.采用上述技术方案,结构更紧凑,且谐波减速器12本身体积小,具有高精度、高承载力等优点,进一步缩小xyθ对位平台的高度,更有利于避免传统的xyθ对位平台的叠加性造成整体高度高而精度不易保证的问题。进一步的,所述旋转座4开设有沉头通孔,所述旋转座4通过螺栓贯穿沉头通孔并与刚轮固定连接。
39.进一步的,所述xyθ对位平台还包括设置于所述第一滑动座2侧壁的x轴感应件15、设置于所述第二滑动座3侧壁的y轴感应件16、设置于所述旋转座4底部的旋转感应件17、设置于所述安装基座1并与x轴感应件15配合用于检测所述第一滑动座2x轴轴向滑动位移的x轴位移传感组件18、设置于所述第一滑动座2并与y轴感应件16配合用于检测所述第二滑动座3y轴轴向滑动位移的y轴位移传感组件19、以及设置于所述第二滑动座3并与旋转感应件17配合用于检测所述旋转座4旋转位移的旋转位移传感组件20。
40.采用上述技术方案,x轴位移传感组件18与x轴感应件15配合用于检测所述第一滑动座2x轴轴向滑动位移,y轴位移传感组件19与y轴感应件16配合用于检测所述第二滑动座3y轴轴向滑动位移,旋转位移传感组件20与旋转感应件17配合用于检测所述旋转座4旋转位移,有利于判断和控制x轴驱动调节机构6对第一滑动座2的调节范围、y轴驱动调节机构8对第二滑动座3的调节范围、以及旋转驱动调节机构对旋转座4的调节范围。
41.上述实施例为本实用新型较佳的实现方案,除此之外,本实用新型还可以其它方式实现,在不脱离本实用新型构思的前提下任何显而易见的替换均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1