一种筒灯装配机的制作方法
1.本实用新型涉及空气净化领域,特别涉及一种筒灯装配机。
背景技术:
2.筒灯是一种嵌入到天花板内光线下射式的照明灯具。筒灯一般是通过安装在其两侧的扭簧来安装到天花板上。筒灯的装配全部由人工操作的生产效率低,因此市场上开发了筒灯装配机,通过筒灯装配机进行筒灯的光源板固定、光源板的点亮测试、透光板的装配等,例如专利号为cn201821871308.3的一种筒灯自动装配机。随着技术的发展,筒灯装配领域也开发出了扭簧自动装配机,例如专利号为cn201821552485.5的一种筒灯弹簧自动装配设备,专利号为cn201920595677.2的一种新式照明灯具生产用扭簧自动装配机,专利号为cn201921438351.5的扭簧自动装配机等。
3.但是,由于筒灯灯体的装配是灯壳正面朝上安装,扭簧装配是筒灯背面朝上进行装配,而且还需将灯壳背面的扭簧安装架的位置摆放至机械装配位置,因此现有筒灯装配领域是将灯体的机械装配和扭簧的机械装配分开进行,如何将实现筒灯的灯体和扭簧的装配在一台机械上进行是本实用新型所要解决的技术问题。
技术实现要素:
4.本实用新型的主要目的是提供一种筒灯装配机,旨在实现筒灯灯体和扭簧的一体装配,减少机械占地体积,提高生产效率。
5.本实用新型提出一种筒灯装配机,包括机架、设置在所述机架上的转台式灯体装配机和转台式扭簧装配机、以及设置在所述转台式灯体装配机和所述转台式扭簧装配机之间的用于将所述转台式灯体装配机上装配成型的灯体夹取并翻转至所述转台式扭簧装配机上的翻转机构。
6.所述转台式扭簧装配机包括扭簧装配自动转台、设置在所述扭簧装配自动转台外侧的单个扭簧装配机构,所述单个扭簧装配机构的数量与灯体上所需安装的扭簧数量一致,所述扭簧装配自动转台上绕着圆周均匀设置有多个灯体定位夹具。
7.所述转台式灯体装配机包括灯体装配自动转台,所述灯体装配自动转台上绕着圆周均匀设置有多个用于放置筒灯灯壳的支撑座,所述支撑座上设有用于限定灯壳上的扭簧安装架的位置的限位结构,以使所述翻转机构按限定摆放的位置将灯体翻转至所述灯体定位夹具上,使所述灯体按限定的位置摆放在所述灯体定位夹具上,并由所述灯体定位夹具将灯体夹紧定位。
8.优选地,所述扭簧安装架设置在灯壳的两侧,所述支撑座上设有与所述灯壳适配的放置槽,所述限位结构由设置在所述放置槽内相对两侧的与灯壳两侧的扭簧安装架适配的限位槽构成。
9.优选地,所述扭簧为双扭簧,包括用于外夹的活动扭臂和用于固定的u型固定扭臂,所述灯壳的扭簧安装架上设有与所述固定扭臂适配的安装插槽,所述安装插槽内壁设
有镂空口,所述镂空口上侧连接有悬臂勾,所述悬臂勾的勾扣位于所述安装插槽内底部的上方,与所述安装插槽内底部之间相对间隔形成连接位;
10.所述单个扭簧装配机构包括用于将扭簧输送至扭簧夹取位置的扭簧送料装置和用于将扭簧夹取位置的扭簧抓取装配至灯壳的扭簧安装架上的机械抓取装置,所述机械抓取装置包括扭簧装配移动装置和安装在所述扭簧装配移动装置上的扭簧装配机械夹爪,所述扭簧装配移动装置带动所述扭簧装配机械夹爪至扭簧夹取位置去抓取扭簧,在所述扭簧装配机械夹爪抓取扭簧后,所述扭簧装配移动装置带动所述扭簧装配机械夹爪移动至抓取的扭簧的固定扭臂插入安装插槽中且扣入所述连接位中,所述悬臂勾的勾扣压置在所述固定扭臂上,使扭簧装配在扭簧安装架上。
11.优选地,所述扭簧送料装置包括送料振动盘、与所述送料振动盘的输出端口连接的扭簧输送通道、用于摆正所述扭簧输送通道上的扭簧的扭簧摆正夹爪、二次转接移动装置、安装在所述二次转接移动装置上的转接台以及用于将所述扭簧输送通道上的扭簧输送至所述转接台上的一次转接移动装置,所述转接台上设有与所述固定扭臂适配的扭臂插槽,所述二次转接移动装置用于将所述转接台在扭簧输入位置和扭簧夹取位置来回移动。
12.所述扭簧输送通道设有插槽通道和位于所述插槽通道的侧下方的支撑通道,在所述固定扭臂竖直插入所述插槽通道中时,所述活动扭臂支撑在所述支撑通道上;所述转接台上设有与所述固定扭臂适配的扭臂插槽和位于所述扭臂插槽的侧下方的扭臂支撑台,在所述固定扭臂竖直插入所述扭臂插槽中时,所述活动扭臂支撑在所述扭臂支撑台上。
13.优选地,所述灯体定位夹具包括基座、安装在所述基座上的自动居中夹持结构、弹性复位组件和用于承接灯壳的承接架,所述自动居中夹持结构包括两组相对设置的夹板组件和安装在每一组所述夹板组件上的齿条,在所述基座上设有平行相对的两组滑轨和设置在两组所述滑轨之间的齿轮,所述齿轮通过旋转组件进行可转动安装,每一所述夹板组件滑动安装在一所述滑轨上,两组所述夹板组件上的齿条平行设置在相对面上,并与所述滑轨平行,且所述齿条的齿面均对着所述齿轮,所述夹板组件中的夹板垂直位于所述齿条的端部,通过所述齿轮转动带动所述夹板组件相对反向移动以实现所述自动居中夹持结构的打开;所述弹性复位组件用于在所述自动居中夹持结构打开后将所述夹板组件推回原位以实现自动居中夹紧灯体;
14.所述承接架包括承接板和用于支撑所述承接板且位于所述承接板的相对两侧的承接支架,所述承接架架设在所述自动居中夹持结构的上方,且所述夹板组件位于所述承接板的另外相对两侧,所述承接板上设有多个围绕灯壳放置区设置的限位部,所述限位部之间间隔形成与所述夹板组件相对的夹持口,在弹性复位组件的作用下使夹板组件相对收拢夹紧灯体。
15.优选地,还包括用于驱动所述灯体定位夹具打开的定位夹具开启气缸,所述定位夹具开启气缸的活动杆端部连接有推进杆,所述夹板组件上设有与与其自身无连接关系的所述齿条的端部相对的通孔,所述推进杆对着所述通孔,所述定位夹具开启气缸带动所述推进杆从所述通孔伸入以推动相应的所述齿条,再通过所述齿轮带动另一齿条,使两齿条相对反向移动以实现所述自动居中夹持结构的打开。
16.所述扭簧装配自动转台的内圈或外圈设有固定台,所述定位夹具开启气缸安装在所述固定台上的与翻转工位相对的位置。
17.优选地,所述转台式扭簧装配机还包括灯体调位机构,用于矫正定位在所述灯体定位夹具上的灯体的扭簧安装架的位置;所述灯体调位机构包括调位机架、安装在所述调位机架上的与灯壳上的扭簧安装架的设定位置一一对应的调位用机械夹爪,所述调位用机械夹爪包括动力源、平展位于扭簧安装架的设定位置一侧的第一夹爪和平展位于扭簧安装架的设定位置另一侧的第二夹爪,所述动力源驱动平展的第一夹爪和第二夹爪相向运动;灯体调位工位设置在扭簧装配工序之前,所述定位夹具开启气缸安装在所述固定台上的与灯体调位工位相对的位置。
18.优选地,所述转台式扭簧装配机还包括设置在所述扭簧装配自动转台外侧的激光打标机构和出料机构,激光打标工序位于扭簧装配工序之前或者之后,出料工序排最后。
19.优选地,所述转台式灯体装配机包括设置在所述灯体装配自动转台外侧的点亮测试机构、热铆接机构、透光板装配机构、ng剔除机构,点亮测试工序位于热铆接工序之前,热铆接工序位于透光板装配工序之前,所述点亮测试机构包括光亮检测装置,用于检测点亮测试工序中的光源是否点亮合格,点亮不合格则后续的热铆接机构、透光板装配机构停止工作,ng剔除机构启动;点亮合格则后续的热铆接机构、透光板装配机构启动,ng剔除机构停止工作。
20.优选地,所述筒灯灯壳上设有铆接柱,所述筒灯灯壳内放置有led光源板,所述led光源板上设有铆接孔,所述铆接柱贯穿所述铆接孔;所述热铆接机构包括热铆接机架、安装在所述热铆接机架上的热铆接升降机构、与所述热铆接升降机构连接的热铆接主机,所述热铆接主机包括与所述铆接柱对应的热熔铆接头,所述热铆接升降机构带动所述热铆接主机下降至所述热熔铆接头压置在热铆接工位的筒灯灯壳内的铆接柱上,形成铆点,使所述led光源板铆接固定在所述筒灯灯壳内。
21.与现有技术相比,本实用新型的有益效果为:
22.本实用新型提出的筒灯装配机将转台式灯体装配机和转台式扭簧装配机进行结合,在转台式灯体装配机和转台式扭簧装配机之间设置用于将转台式灯体装配机上装配成型的灯体夹取并翻转至转台式扭簧装配机上的翻转机构。转台式扭簧装配机包括扭簧装配自动转台、设置在扭簧装配自动转台外侧的单个扭簧装配机构,单个扭簧装配机构的数量与灯体上所需安装的扭簧数量一致,扭簧装配自动转台上绕着圆周均匀设置有多个灯体定位夹具。
23.转台式灯体装配机包括灯体装配自动转台,灯体装配自动转台上绕着圆周均匀设置有多个用于放置筒灯灯壳的支撑座,支撑座上设有用于限定灯壳上的扭簧安装架的位置的限位结构,以使翻转机构按限定摆放的位置将灯体翻转至灯体定位夹具上,使灯体按限定的位置摆放在灯体定位夹具上,并由灯体定位夹具将灯体夹紧定位。从而通过转台式灯体装配机进行筒灯灯体的装配,再通过转台式扭簧装配机进行扭簧装配,并通过支撑座上的限位结构、翻转机构和灯体定位夹具使装配好的灯体翻转并按照限定的位置固定在灯体定位夹具上以便单个扭簧装配机构将扭簧装配到灯壳上,完成筒灯的整体装配,生产效率高。本实用新型提出的筒灯装配机采用转台形式,与生产线相比能减少机械占地体积。
附图说明
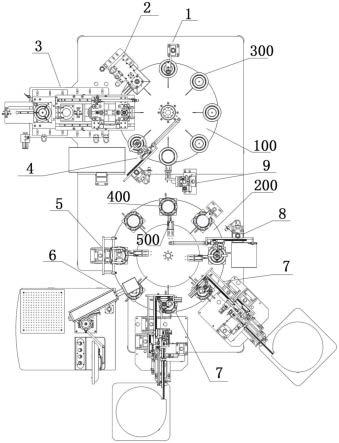
24.图1为本实用新型的筒灯装配机的整体图。
25.图2为本实用新型的筒灯装配机的支撑座的结构示意图。
26.图3为本实用新型的筒灯装配机的支撑座上安装灯壳的结构示意图。
27.图4为本实用新型的筒灯装配机的点亮测试机构的结构示意图。
28.图5为本实用新型的筒灯装配机的热铆接机构的结构示意图。
29.图6为本实用新型的筒灯装配机的透光板装配机构的结构示意图。
30.图7为本实用新型的筒灯装配机的透光板装配机构的堆料出料组件的结构示意图1。
31.图8为本实用新型的筒灯装配机的透光板装配机构的堆料出料组件的结构示意图2。
32.图9为本实用新型的筒灯装配机的ng剔除机构的结构示意图。
33.图10为本实用新型的筒灯装配机的翻转机构的结构示意图。
34.图11为本实用新型的筒灯装配机的灯体定位夹具的结构示意图。
35.图12为本实用新型的筒灯装配机的灯体定位夹具的结构分解示意图。
36.图13为本实用新型的筒灯装配机的灯体定位夹具的内部结构示意图。
37.图14为本实用新型的筒灯装配机的灯体定位夹具夹紧筒灯时的结构示意图。
38.图15为本实用新型的筒灯装配机的装配的筒灯灯壳的结构示意图。
39.图16为本实用新型的筒灯装配机的装配的扭簧的结构示意图。
40.图17为本实用新型的筒灯装配机的灯体调位机构的结构示意图。
41.图18为本实用新型的筒灯装配机的单个扭簧装配机构的结构示意图。
42.图19为本实用新型的筒灯装配机的单个扭簧装配机构的部分结构示意图。
43.图20为本实用新型的筒灯装配机的出料机构的结构示意图。
44.本实用新型目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
45.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或者类似的标号标识相同或者类似的元件或者具有相同或者类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
46.参照图1至图20,提出本实用新型的一种筒灯装配机的实施例:
47.一种筒灯装配机,包括机架、设置在机架上的转台式灯体装配机和转台式扭簧装配机、以及设置在转台式灯体装配机和转台式扭簧装配机之间的用于将转台式灯体装配机上装配成型的灯体夹取并翻转至转台式扭簧装配机上的翻转机构9。采用自动化控制系统对转台式灯体装配机、转台式扭簧装配机和翻转机构9进行自动化控制。例如,可以采用plc控制系统。
48.转台式扭簧装配机包括扭簧装配自动转台200、设置在扭簧装配自动转台200外侧的单个扭簧装配机构7,单个扭簧装配机构7的数量与灯体上所需安装的扭簧数量一致,扭簧装配自动转台200上绕着圆周均匀设置有多个灯体定位夹具400。通过一组单个扭簧装配机构7对一个扭簧进行装配。
49.转台式灯体装配机包括灯体装配自动转台100,灯体装配自动转台100上绕着圆周
均匀固定有多个用于放置筒灯灯壳600的支撑座300,支撑座300上设有用于限定灯壳600上的扭簧安装架62的位置的限位结构,以使翻转机构9按限定摆放的位置将灯体翻转至灯体定位夹具400上,使灯体按限定的位置摆放在灯体定位夹具400上,并由灯体定位夹具400将灯体夹紧定位。从而通过转台式灯体装配机进行筒灯灯体的装配,再通过转台式扭簧装配机进行扭簧装配,并通过支撑座300上的限位结构、翻转机构9和灯体定位夹具400使装配好的灯体翻转并按照限定的位置固定在灯体定位夹具400上以便单个扭簧装配机构7将扭簧装配到灯壳600上,完成筒灯的整体装配,生产效率高。本筒灯装配机采用转台形式,与生产线相比能减少机械占地体积。
50.具体的,灯壳600包括圆筒形壳体和位于圆筒形壳体的前端的面环61,面环61与圆筒形壳体为一体成型。扭簧安装架62设置在灯壳600的相对两侧,支撑座300上设有与灯壳600适配的圆形的放置槽31,限位结构由设置在放置槽31内相对两侧的与灯壳600两侧的扭簧安装架62适配的限位槽32构成。先由人工将led光源板700放置于灯壳600内,再由人工将放置有led光源板700的灯壳600摆放到支撑座300上,灯壳600上的扭簧安装架62置于限位槽32中,使每个灯壳600都按固定的摆放位置摆放在支撑座300上,再经转台式灯体装配机上的各个机构来完成灯体装配。
51.在本实施例中,转台式灯体装配机包括依次围绕在灯体装配自动转台100外侧的点亮测试机构1、热铆接机构2、透光板装配机构3和ng剔除机构4,点亮测试工序位于热铆接工序之前,热铆接工序位于透光板装配工序之前,装有led光源板700的灯壳600由灯体装配自动转台100转至点亮测试工位,由点亮测试机构1对led光源板700进行点亮测试。
52.点亮测试机构1包括测试机架11、安装在测试机架11上的测试升降机构、与测试升降机构连接的测试主机13,测试主机13包括与led光源板700上的电接点对应的测试接头14,测试升降机构带动测试主机13下降至测试接头14压置在测试工位的筒灯灯壳600内的led光源板700的电接点上,为led光源板700进行接电点亮测试。
53.具体的,测试升降机构包括测试升降气缸12,测试升降气缸12的活动杆与测试主机13连接,带动测试主机13上下升降。
54.点亮测试机构1包括光亮检测装置,用于检测点亮测试工序中的光源是否点亮合格,点亮不合格则发送不合格信号给自动化控制系统,由自动化控制系统控制后续的热铆接机构2、透光板装配机构3停止工作,ng剔除机构4启动;反之,点亮合格则控制后续的热铆接机构2、透光板装配机构3启动,ng剔除机构4停止工作。
55.测试工序完成后由灯体装配自动转台100转至热铆接工位。点亮测试合格的产品进行热铆接工序。
56.筒灯灯壳600上设有铆接柱800,led光源板700上设有铆接孔,铆接柱800贯穿铆接孔。热铆接机构2包括热铆接机架201、安装在热铆接机架201上的热铆接升降机构、与热铆接升降机构连接的热铆接主机203,热铆接主机203包括与铆接柱800对应的热熔铆接头204,热铆接升降机构带动热铆接主机203下降至热熔铆接头204压置在热铆接工位的筒灯灯壳600内的铆接柱800上,形成铆点,使led光源板700铆接固定在筒灯灯壳600内。热铆接工序完成。
57.热铆接升降机构包括热铆接升降气缸202和平衡导向轴206,平衡导向轴206与升降气缸202的活动杆平行,且一端均与热铆接主机203连接,热铆接机架201上安装有轴套,
平衡导向轴206的另一端贯穿轴套。
58.热铆接主机203还包括弹性抵压头205,弹性抵接头205与热熔铆接头204平行设置,用于在热铆时抵压在led光源板700上。
59.热铆接工序完成后由灯体装配自动转台100转至透光板装配工位。
60.透光板装配机构3包括透光板装配机架、安装在透光板装配机架上的堆料出料组件、用于吸附从堆料出料组件输出的透光板的吸附组件和用于带动吸附组件运动以将透光板放置到透光板装配工位的灯壳600中的移动组件。
61.堆料出料组件包括用于叠放透光板的堆料台301、出料台303、出料轨道305以及出料气缸309,堆料台301下部横向贯穿设有出料通道302,堆料台301上部竖向贯穿设有与出料通道连通的下料通道,出料轨道305贯穿安装在出料通道302中,出料台303通过滑动块滑动安装在出料轨道305上,出料气缸309的活动杆与出料台303连接,带动出料台303在出料轨道305上移动。出料台303上设有用于承接透光板的承接槽304,出料台303的上端面紧贴下料通道的下端口,透光板308叠放在下料通道中,通过移动出料台303使承接槽304对着下料通道,下料通道中最底部的透光板308落入承接槽304中,再移动出料台303使透光板输出至吸附位。
62.堆料台301上设有与下料通道对应的延伸通道306,延伸通道306由多根设置在堆料台301上且围绕下料通道设置的延伸杆307构成,用于堆叠更多的透光板。灯壳600的出光口内壁设有一圈用于卡接透光板的卡接槽,装配时,通过吸附组件将吸附到的透光板下压至灯壳600内,使透光板的边缘卡入卡接槽中,完成透光板的装配。
63.移动组件包括两端分别朝向吸附位上方、透光板装配工位上方的水平移动轨道311、滑动安装在水平移动轨道311上的支撑板312、固定安装在支撑板312上的吸附用升降气缸314、用于推动支撑板312在水平移动轨道311上移动的水平驱动气缸313。吸附组件包括两个透光板吸附头315,吸附用升降气缸314设有两个,两吸附用升降气缸314的活动杆分别通过连接板与两透光板吸附头315连接固定,在透光板装配机架上设有位于吸附位前方的透光板放置槽310,两个吸附用升降气缸314之间间隔距离与透光板放置槽310到吸附位之间的距离相等,水平驱动气缸313带动支撑板312向吸附位方向移动至一透光板吸附头315位于吸附位上方,另一透光板吸附头315位于透光板放置槽310上方,再由吸附用升降气缸314带动透光板吸附头315下降至与一透光板吸附头315贴近吸附位以吸附吸附位上的透光板,另一透光板吸附头315贴近透光板放置槽310以吸附透光板放置槽310中的透光板,透光板吸附头315吸附透光板后吸附用升降气缸314带动吸附有透光板的透光板吸附头315上升至吸附位和透光板放置槽310的上方,接着由水平驱动气缸313带动支撑板312向透光板装配工位方向移动,一透光板吸附头315移动至透光板放置槽310上方,另一透光板吸附头315移动至透光板装配工位上方,再通过吸附用升降气缸314带动透光板吸附头315下降,一透光板吸附头315下降至其吸附的透光板置于透光板放置槽310中,另一透光板吸附头315下降至其吸附的透光板装配至灯壳600中,接着透光板吸附头315关闭吸附力,放开被其吸附的透光板,再由吸附用升降气缸314带动透光板吸附头315上升至透光板放置槽310上方、透光板装配工位上方,接着又由水平驱动气缸313带动支撑板312向吸附位方向移动至一透光板吸附头315位于吸附位上方,另一透光板吸附头315位于透光板放置槽310上方,循环上述动作。其中,在初始时,透光板放置槽310中透光板可由工作人员放置或者由第一轮上述
动作将吸附位上的透光板输送至透光板放置槽310中。
64.点亮测试不合格的产品则进行ng剔除工序。
65.ng剔除机构4,包括移出滑道401、剔除支架、安装在剔除支架上的抓取移动轨道402、通过滑块滑动安装在该抓取移动轨道402上的安装板404、用于驱动安装板404在抓取移动轨道402上移动的抓取移动气缸403、固定在安装板404上的抓取升降气缸405和抓取升降轨道、通过滑块滑动安装在抓取升降轨道上的连接板以及连接固定在连接板上的机械夹爪406,抓取移动气缸403的活动杆与安装板404连接,抓取升降气缸405的活动杆与连接板连接。机械夹爪406的两侧夹板的内侧相对设有与灯壳600前端的面环61部位的外缘适配的卡槽407,机械夹爪406抓取灯壳600时,面环61外缘卡入卡槽407中,以便稳定夹取灯壳600。
66.在待料状态时,机械夹爪406位于ng剔除工位的上方,机械夹爪406为展开状态。在不合格产品转入ng剔除工位时,抓取升降气缸405带动机械夹爪406下降灯壳600的面环61两侧,接着机械夹爪406收拢以夹住灯壳600;再由抓取升降气缸405带动抓取有灯壳600的机械夹爪406上升,接着由抓取移动气缸403推动安装板404至移出滑道401上方,再由抓取升降气缸405带动抓取有灯壳600的机械夹爪406下降至靠近移出滑道401,然后机械夹爪406展开,灯壳600下落至移出滑道401,并从移出滑道401滑出。接着,再由抓取升降气缸405和抓取移动气缸403带动机械夹爪406移动至ng剔除工位的上方,再次等待来料,以此循环。在点亮测试机构1检测到的不合格产品由ng剔除机构4移出。
67.透光板装配工序完成后形成灯体,装配好的筒灯灯体由翻转机构9翻转至扭簧装配自动转台200的灯体定位夹具400中。
68.具体的,翻转机构9包括翻转机架901、竖向安装在翻转机架901上的翻转升降轨道、通过滑块滑动安装在该翻转升降轨道上的翻转安装板902、用于驱动翻转安装板902在翻转升降轨道上移动的翻转升降气缸903、连接固定在翻转安装板902上的电动转头904、与电动转头904连接的机械夹爪905,该机械夹爪905的两侧夹板的内侧相对设有与灯壳600前端面环61的外缘适配的卡槽906,在翻转工序中,翻转机构9的机械夹爪905抓取灯壳600时,面环61外缘卡入该卡槽906中,以便稳定夹取灯壳600。
69.在待料状态时,机械夹爪905展开且位于灯体装配自动转台100的翻转工位的上方。在装配好的灯体转动到灯体装配自动转台100的翻转工位的同时,灯体定位夹具400转动到扭簧装配自动转台200的翻转工位,此时,翻转升降气缸903带动翻转安装板902在翻转升降轨道上做下降动作,使展开的机械夹爪905的两侧夹板位于面环61两侧,接着机械夹爪905收拢以夹住灯体,再由电动转头904带动抓取到灯体的机械夹爪905翻转至扭簧装配自动转台200的灯体定位夹具400上,接着机械夹爪905松开灯体,使灯体落入展开的灯体定位夹具400上,灯体下落后由灯体定位夹具400夹紧,灯体的背部朝上固定在灯体定位夹具400上。接着,翻转升降气缸903带动翻转安装板902在翻转升降轨道上做上升动作,使机械夹爪905上升至扭簧装配自动转台200的翻转工位上方,再由电动转头904带动机械夹爪905翻转至灯体装配自动转台100的翻转工位上方,等待下次来料,以此循环。
70.灯体定位夹具400包括基座41、安装在基座41上的自动居中夹持结构、弹性复位组件和用于承接灯壳600的承接架。自动居中夹持结构包括两组相对设置的夹板组件和安装在每一组夹板组件上的齿条44,在基座41上设有平行相对的两组滑轨42和设置在两组滑轨42之间的齿轮45,齿轮45通过旋转组件进行可转动安装,每一夹板组件滑动安装在一滑轨
42上,两组夹板组件上的齿条44平行设置在相对面上,并与滑轨42平行,且齿条44的齿面均对着齿轮45。通过齿轮45转动带动夹板组件相对反向移动以实现自动居中夹持结构的打开;弹性复位组件用于在自动居中夹持结构打开后将夹板组件推回原位以实现自动居中夹紧灯体。
71.承接架包括承接板47和用于支撑承接板47且位于承接板47的相对两侧的承接支架471,承接架架设在自动居中夹持结构的上方,且夹板组件位于承接板的另外相对两侧。承接板47上设有多个围绕灯壳600放置区设置的限位部472,由于面环61为圆形,则限位部472的与面环61相对的内侧为适配的圆弧形状。限位部472之间间隔形成与夹板组件相对的夹持口,灯壳600的面环61外缘从夹持口露出,在弹性复位组件的作用下使夹板组件相对收拢夹紧灯壳600。夹板组件包括l型连接件43和夹板48,l型连接件43的两个连接面相互垂直,一连接面与齿条44平行且连接固定,另一连接面垂直置于齿条44的一端且与夹板48连接固定,夹板48上设有与夹持口对应的凸块49,在夹板组件相对收拢时,凸块49挤压在从夹持口露出的面环61外缘上,以夹紧灯体。
72.弹性复位组件设有两组,分别对应两组夹板组件,分别带动夹板组件复位。弹性复位组件包括固定在基座41上的第一固定件、固定在夹板组件下方的第二固定件和复位弹簧46,第一固定件和第二固定件沿滑轨42的滑动方向相对间隔分布,复位弹簧46的两端分别连接在第一固定件和第二固定件上。夹板组件通过齿轮45转动而沿着滑轨42移动,从而使复位弹簧46形变产生弹力,以使夹板组件复位。
73.旋转组件包括中心轴和第一轴承,基座41上设有下通孔,第一轴承安装在下通孔内,中心轴贯穿第一轴承,齿轮45固定安装在中心轴上;承接板47上设有上通孔,在上通孔内安装第二轴承,中心轴的上端穿入第二轴承中,齿轮45置于第一轴承与第二轴承之间。
74.本实施例中采用定位夹具开启气缸500来驱动灯体定位夹具400打开。定位夹具开启气缸500的活动杆端部连接有推进杆,夹板48上设有与与其自身无连接关系的齿条44的端部相对的通孔481,推进杆对着通孔481,定位夹具开启气缸500带动推进杆从所述通孔481伸入以推动相应的齿条44,再通过齿轮45带动另一齿条44,使两齿条44相对反向移动以实现自动居中夹持结构的打开。
75.本实施例中,扭簧装配自动转台200为环形,其内圈设有固定台,定位夹具开启气缸500安装在固定台上的与翻转工位相对的位置,以在翻转工位驱动灯体定位夹具400打开来承接翻转而来的灯体,在灯体下落到灯体定位夹具400中时,定位夹具开启气缸500带动推进杆缩回以解除对齿条44施力,并通过弹性复位组件来收拢灯体定位夹具400,使其保持灯体夹紧状态。
76.由于在将灯体翻转至灯体定位夹具400的过程中会使灯体的位置产生微小偏差,而导致扭簧安装架62的位置产生微小偏差。为确保扭簧安装架62的位置准确,转台式扭簧装配机还包括灯体调位机构5,用于矫正定位在灯体定位夹具400上的灯体的扭簧安装架62的位置。
77.灯体调位机构5包括调位机架501、安装在调位机架501上的与灯壳600上的扭簧安装架62的设定位置一一对应的调位用机械夹爪502,调位用机械夹爪502包括动力源、平展位于扭簧安装架62的设定位置一侧的第一夹爪503和平展位于扭簧安装架62的设定位置另一侧的第二夹爪504,动力源驱动平展的第一夹爪503和第二夹爪504相向运动。灯体调位工
位设置在扭簧装配工序之前,定位夹具开启气缸500安装在固定台上的与灯体调位工位相对的位置,用于打开灯体定位夹具400以便灯体调位机构5对灯体进行调位,以确保扭簧安装架62的位置准确。
78.其中,动力源可为气缸,调位用机械夹爪502为气动夹爪。气缸控制第一夹爪503和第二夹爪504相向运动多次,第一夹爪503和第二夹爪504相向运动时触碰到相应的扭簧安装架62,以推动扭簧安装架62至第一夹爪503和第二夹爪504之间的中间位置,实现调位。
79.接着进行激光打标工序,转台式扭簧装配机还包括设置在扭簧装配自动转台200外侧的激光打标机构6,通过激光打标机构6对灯体的背部进行激光打标。激光打标机构6为现有设备,其具体结构不在赘述。
80.当然,在其他实施例中,激光打标工序还可位于扭簧装配工序之后,或者取消激光打标工序。
81.在激光打标工序完成后转至第一侧扭簧装配工序,在第一侧扭簧装配工序完成后再转至第二侧扭簧装配工序,直至扭簧装配工序完成。
82.具体的,扭簧为双扭簧,包括用于外夹固定筒灯至天花板上的u型活动扭臂67和用于固定至灯壳600上的u型固定扭臂66。灯壳600的扭簧安装架62上设有与固定扭臂66适配的安装插槽63,安装插槽63内壁设有镂空口,镂空口上侧连接有悬臂勾64,悬臂勾64的勾扣位于安装插槽63内底部的上方,与安装插槽63内底部之间相对间隔形成连接位。
83.单个扭簧装配机构7包括用于将扭簧输送至扭簧夹取位置的扭簧送料装置和用于将扭簧夹取位置的扭簧抓取装配至灯壳600的扭簧安装架62上的机械抓取装置708,机械抓取装置708包括扭簧装配移动装置和安装在扭簧装配移动装置上的扭簧装配机械夹爪725。扭簧装配移动装置带动扭簧装配机械夹爪725至扭簧夹取位置去抓取扭簧,在扭簧装配机械夹爪725抓取扭簧后,扭簧装配移动装置带动扭簧装配机械夹爪725移动至抓取的扭簧的固定扭臂66插入安装插槽63中且扣入连接位中,悬臂勾64的勾扣压置在固定扭臂66上,使扭簧装配在扭簧安装架62上。
84.扭簧送料装置包括送料振动盘701、与送料振动盘701的输出端口连接的扭簧输送通道702、用于摆正扭簧输送通道702上的扭簧的扭簧摆正夹爪705、二次转接移动装置707、安装在二次转接移动装置707上的转接台718以及用于将扭簧输送通道702上的扭簧输送至转接台718上的一次转接移动装置706,二次转接移动装置707用于将转接台718在扭簧输入位置和扭簧夹取位置来回移动。
85.送料振动盘701输出的扭簧为扭臂朝下,弹簧主体65朝上摆放。扭簧输送通道702设有插槽通道703和支撑通道704,扭簧的u型固定扭臂66插入插槽通道703中,支撑通道704位于下方,用于支撑u型活动扭臂67。在u型固定扭臂66竖直插入插槽通道703中时,u型活动扭臂67支撑在支撑通道704上。由于输入扭簧输送通道702的扭簧会倾斜,u型活动扭臂67不在支撑通道704上,为确保扭簧的u型固定扭臂66处于竖直向下的状态,故而设置扭簧摆正夹爪705。
86.转接台718上设有与固定扭臂66适配的扭臂插槽719和位于扭臂插槽的侧下方的扭臂支撑台,在固定扭臂66竖直插入扭臂插槽719中时,活动扭臂67支撑在扭臂支撑台上。
87.扭簧摆正夹爪705的扭簧摆正原理与上述的灯体调位机构5的调位原理相同,通过扭簧摆正夹爪705的张开、合拢来触碰弹簧主体65,使扭簧的弹簧主体65处于扭簧摆正夹爪
705的中间位置,拨动弹簧主体65使u型活动扭臂67支撑在支撑通道704上,从而达到确保扭簧的u型固定扭臂66处于竖直向下的目的。
88.具体的,一次转接移动装置706包括一次转接支架709、安装在一次转接支架709上的用于水平位移的一次转接移动轨道710、通过滑块滑动安装在一次转接移动轨道710上的一次转接升降轨道713、驱动一次转接升降轨道713在一次转接移动轨道710上移动的一次转接水平气缸711、通过滑块滑动安装在一次转接升降轨道713上的l型连接架714、连接固定在l型连接架714上的一次转接夹爪715、用于驱动l型连接架714在一次转接升降轨道713上做升降移动的一次转接升降气缸712。
89.二次转接移动装置707包括二次转接支架720、安装在二次转接支架720上的用于水平位移的二次转接移动轨道716和二次转接水平气缸717,转接台718通过滑块滑动安装在二次转接移动轨道716上,二次转接水平气缸717驱动转接台718在二次转接移动轨道716上滑动。
90.通过一次转接水平气缸711带动一次转接升降轨道713向扭簧输送通道702方向输送至扭簧输送通道702上方,再由一次转接升降气缸712带动l型连接架714及其上的一次转接夹爪715向下移动以夹取扭簧输送通道702上的扭簧,夹取到扭簧后再次由一次转接升降气缸712带动l型连接架714及其上的一次转接夹爪715向上移动,再由一次转接水平气缸711带动一次转接升降轨道713向转接台718方向移动至转接台718上方,接着由一次转接升降气缸712带动l型连接架714及其上的一次转接夹爪715向下移动以使一次转接夹爪715夹取到的扭簧的固定扭臂66插入转接台718上的扭臂插槽719中,活动扭臂67支撑在扭臂支撑台上。接着通过二次转接水平气缸717带动转接台718向机械抓取装置708方向输送至扭簧夹取位置,为机械抓取装置708供料。同时,一次转接升降气缸712带动l型连接架714及其上的一次转接夹爪715向上移动,然后由一次转接水平气缸711带动一次转接升降轨道713向扭簧输送通道702方向输送至扭簧输送通道702上方,以此循环。在机械抓取装置705将输送至扭簧夹取位置上的扭簧夹取后,二次转接水平气缸717带动转接台718移回,以此循环送料。
91.扭簧装配移动装置包括扭簧装配水平轨道721、通过滑块滑动安装在扭簧装配水平轨道721上的扭簧装配升降轨道724、驱动扭簧装配升降轨道724在扭簧装配水平轨道721上移动的扭簧装配水平气缸722、通过滑块滑动安装在扭簧装配升降轨道724上扭簧装配连接架、驱动扭簧装配连接架在扭簧装配升降轨道724上移动的扭簧装配升降气缸723,扭簧装配机械夹爪725连接固定在扭簧装配连接架上。扭簧装配升降气缸723带动扭簧装配机械夹爪725上升,通过扭簧装配水平气缸722将扭簧装配升降轨道724及其上的扭簧装配机械夹爪725向扭簧夹取位置方向移动,使扭簧装配机械夹爪725位于扭簧夹取位置的正上方,再由扭簧装配升降气缸723带动扭簧装配机械夹爪725向下移动以夹取位于扭簧夹取位置的转接台718上的扭簧,夹取到扭簧后再次由扭簧装配升降气缸723带动扭簧装配机械夹爪725向上移动,接着由扭簧装配水平气缸722将扭簧装配升降轨道724及其上的扭簧装配机械夹爪725向扭簧装配工位方向移动,使扭簧装配机械夹爪725上夹取的扭簧的固定扭臂66位于扭簧安装架62的安装插槽63的正上方,再由扭簧装配升降气缸723带动扭簧装配机械夹爪725向下移动以使抓取的扭簧的固定扭臂66插入安装插槽63中且扣入连接位中,完成一个扭簧的装配。接着,扭簧装配升降气缸723带动扭簧装配机械夹爪725向上移动,再由扭
簧装配水平气缸722将扭簧装配升降轨道724及其上的扭簧装配机械夹爪725向扭簧夹取位置方向移动,以此循环。
92.转台式扭簧装配机还包括设置在扭簧装配自动转台200外侧的出料机构8,扭簧装配工序完成后由出料机构8将装配好的筒灯输出。
93.出料机构8包括出料滑道801、出料支架、安装在出料支架上的出料移动轨道802、通过滑块滑动安装在该出料移动轨道802上的出料升降轨道804、用于驱动出料升降轨道804在出料移动轨道802上移动的出料移动气缸803、固定在出料升降轨道804上的出料升降气缸805、通过滑块滑动安装在出料升降轨道804上的出料连接板806以及连接固定在出料连接板806上的出料吸头807,出料移动气缸803的活动杆与出料升降轨道804连接,出料升降气缸805的活动杆与出料连接板806连接。
94.在固定台上设有与出料工位位置相对的定位夹具开启气缸500,用于打开灯体定位夹具400以便出料吸头将灯体定位夹具400上的筒灯吸走。
95.在待料状态时,出料吸头807位于出料工位的上方。在装配好的筒灯转入出料工位时,定位夹具开启气缸500驱动灯体定位夹具400打开,同时,出料升降气缸805带动出料吸头807下降以吸附筒灯,再由出料升降气缸805带动吸附有筒灯的吸头807上升,同时定位夹具开启气缸500缩回;接着由出料移动气缸803推动出料升降轨道804至出料滑道801上方,再由出料升降气缸805带动抓取有筒灯的吸头807下降至靠近出料滑道801,然后出料吸头807放开筒灯,筒灯下落至出料滑道801,并从出料滑道801滑出。接着,再由出料升降气缸805和出料移动气缸803带动出料吸头807移动至出料工位的上方,再次等待来料,以此循环。
96.以上实施例仅用以说明本实用新型的技术方案,而非对实用新型的保护范围进行限制。显然,所描述的实施例仅仅是本实用新型部分实施例,而不是全部实施例。基于这些实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型所要保护的范围。尽管参照上述实施例对本实用新型进行了详细的说明,本领域普通技术人员依然可以在不冲突的情况下,不作出创造性劳动对本实用新型各实施例中的特征根据情况相互组合、增删或作其他调整,从而得到不同的、本质未脱离本实用新型的构思的其他技术方案,这些技术方案也同样属于本实用新型所要保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1