一种柔性多轴拧紧系统的制作方法
1.本实用新型涉及柔性拧紧技术领域,尤其涉及一种柔性多轴拧紧系统。
背景技术:
2.拧紧作业是工业制造体系中的核心环节之一,对于螺母、螺钉等关键零部件拧紧作业的质量高低,直接影响到整个产品的质量、安全新能和有效性。随着汽车行业智能制造的兴起,汽车生产自动化行业中对紧固件的拧紧存在大量的需求,快速、稳定、高效的拧紧解决方案要求越来越高在传统汽车行业领域,紧固件的安装大部分是由操作工来完成的,相对而言人工成本较高,并且装配一致性会随人员操作的熟练度和操作顺序受影响;而现有自动化拧紧领域大部分是单轴设备,不具备兼容多车型,如果需要兼容多车型,需要投入的机器人数量较多造成成本较高,而且拧紧时间较长,大大影响生产效率及成本;现有的拧紧系统由于车身零件精度的误差导致拧紧轴无法实现自动拧紧,造成电气报错,故障率高。
技术实现要素:
3.有鉴于现有技术的上述缺陷,本实用新型所要解决的技术问题是柔性轨道系统如何进行拧紧枪的位移切换以及解决汽车外覆盖件产线不同车型,不同扭矩拧紧需求,实现不同位置度的螺栓拧紧需求。
4.为实现上述目的,本实用新型提供了一种柔性多轴拧紧系统,包括机器人连接轴、主体框架、拧紧轴机构、滑移模块、视觉检测模块和阀岛模块;其中,所述机器人连接轴位于所述主体框架一侧,与所述主体框架连接;所述滑移模块位于所述主体框架另一侧,与所述主体框架连接;所述拧紧轴机构位于所述主体框架的一侧或两侧;与所述主体框架和/或滑移模块连接;所述视觉检测模块与所述机器人连接轴位于所述主体框架同一侧,与所述主体框架连接;所述阀岛模块安装在所述主体框架上。
5.优选地,所述滑移模块包括导轨、滑块、导向连接件、滑移气缸、气缸固定件、气缸浮动接头、位置检测装置和限位装置固;其中,所述导轨和气缸固定件固定在所述主体框架上,所述滑移气缸与气缸固定件连接;所述滑块安装在所述导轨上,可以在所述导轨上滑动;滑块一端通过所述气缸浮动接头与滑移气缸连接,另一端与所述导向连接件连接;一套所述拧紧轴机构与所述导向连接件连接;所述位置检测装置固定在所述导轨的一侧或两侧,依据实际位置需求布置;所述限位装置固定在所述导轨的两侧,用于控制位置精度。
6.优选地,所述滑移模块包括x向滑移模块和z向滑移模块,所述x向滑移模块和 z向滑移模块位于所述主体框架同一侧,分别与所述主体框架连接,可以分别控制y 向和z向拧紧轴机构的移动,实现对拧紧位置的精确控制。
7.优选地,所述位置检测装置为位置传感器,能感受被测物的位置并转换成可用输出信号。
8.优选地,还包括导向连接块,所述导向连接块与所述主体框架直接连接,所述拧紧轴机构与所述导向连接块连接。
9.优选地,所述拧紧轴机构包括伺服拧紧轴和拧紧浮动套筒,所述拧紧浮动套筒与伺服拧紧轴相连。拧紧浮动套筒安装于拧紧轴上方,具有柔性浮动的功能。
10.优选地,所述机器人连接轴与所述主体框架连接方式为紧固件连接,方便拆装维护。
11.优选地,还包括平衡块,所述平衡块固定在所述主体框架上,位于所述滑移模块的另一侧,用于平衡设备重心,提高机器人工作效率,减小机器人负载,延长机器人使用寿命。
12.本实用新型可以解决高节拍、高产能的汽车焊装生产线的自动拧紧问题,通过切换轨道、拧紧机构、视觉检测等解决多车型柔性拧紧功能,通过柔性导轨系统进行拧紧轴机构的位移切换,解决多车型适配问题。
13.本实用新型将原有的人工拧紧方案改成成自动拧紧方案,减少人工投入;将原有单轴拧紧系统替换成集成式的多轴拧紧,大大节约了拧紧时间;同时在伺服拧紧轴上面增加了视觉检测模块,通过视觉检测来纠正理论和实际的偏差量,从而减少拧紧轴的故障率。
14.以下将结合附图对本实用新型的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本实用新型的目的、特征和效果。
附图说明
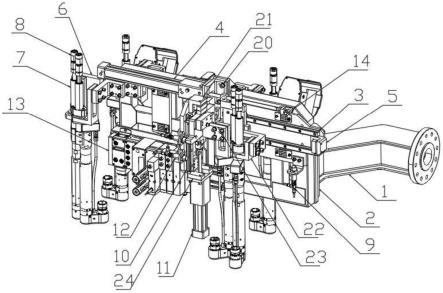
15.图1是本实用新型的一个较佳实施例的结构示意图正视图;
16.图2是本实用新型的一个较佳实施例的结构示意图后视图;
17.图3是本实用新型的一个较佳实施例的机器人连接轴的结构示意图;
18.图4是本实用新型的一个较佳实施例的视觉检测模块的结构示意图。
19.图中:1、机器人连接轴;2、主体框架;3、y向导轨;4、y向滑移气缸;5、y 向限位装置;6、导向连接块;7、伺服拧紧轴;8、拧紧浮动套筒;9、y向位置传感器;10、z向导轨;11、z向滑移气缸;12、z向位置传感器;13、阀岛模块;14、气缸浮动接头;15、z向限位装置;16、导向连接块;17、视觉检测模块;18、平衡块; 19、导向连接块;20、气缸固定件;21、导向连接块;22、y向导向连接件;23、z 向导向连接件;24、导向连接块。
具体实施方式
20.以下参考说明书附图介绍本实用新型的多个优选实施例,使其技术内容更加清楚和便于理解。本实用新型可以通过许多不同形式的实施例来得以体现,本实用新型的保护范围并非仅限于文中提到的实施例。
21.在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本实用新型并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方适当夸大了部件的厚度。
22.如图1~图4所示,在本实用新型的一个较佳实施例中,柔性多轴拧紧系统包括机器人连接轴1、主体框架2、六套拧紧轴机构、滑移模块、视觉检测模块17、阀岛模块13以及平衡块18。
23.如图1和图2所示,机器人连接轴1位于主体框架2一侧,一端与主体框架2连接,另一端法兰面直接和外部机器人用连接销和连接螺栓固定;滑移模块包括y向滑移模块和z向滑移模块,两组滑移模块位于主体框架2另一侧,与主体框架2连接;六套拧紧轴机构位于所
述主体框架的两侧,其中三套与主体框架2连接,三套与滑移模块连接;在其他实施例中,拧紧轴机构可以位于主体框架2的一侧或两侧,与所述主体框架和/或滑移模块连接。
24.如图1、图2和图4所示,视觉检测模块17与机器人连接轴1位于主体框架2同一侧,与主体框架2连接;阀岛模块13安装在主体框架2上。
25.如图1和图2所示,y向滑移模块包括y向导轨3、y向滑块、y向导向连接件22、y向滑移气缸4、气缸固定件20、气缸浮动接头14、y向位置检测装置和y向限位装置5;其中,y向导轨3和气缸固定件20固定在主体框架2上,y向滑移气缸3与气缸固定件20连接;y向滑块安装在y向导轨3上,可以在y向导轨3上滑动;y向滑块一端通过气缸浮动接头14与y向滑移气缸3连接,另一端与y向导向连接件22连接;一套拧紧轴机构与y向导向连接件22连接;y向位置检测装置固定在y向导轨3 的两侧;y向限位装置5固定在y向导轨3的两侧。本优选实施例中,y向位置检测装置为位置传感器,能感受被测物的位置并转换成可用输出信号,y向位置传感器9安装在y向导轨3的两侧,输出相关位置信号,保证设备稳定性。
26.如图1和图2所示,z向滑移模块包括z向导轨10、z向滑块、z向导向连接件 23、z向滑移气缸11、气缸固定件20、气缸浮动接头14、z向位置检测装置和z向限位装置15;其中,z向导轨10和气缸固定件20固定在主体框架2上,z向滑移气缸 11与气缸固定件20连接;z向滑块安装在z向导轨10上,可以在z向导轨10上滑动; z向滑块一端通过气缸浮动接头14与z向滑移气缸11连接,另一端与z向导向连接件23连接;一套拧紧轴机构与z向导向连接件23连接;z向位置检测装置固定在z 向导轨10的两侧;z向限位装置固定在z向导轨10的两侧。本优选实施例中,z向位置检测装置为位置传感器,能感受被测物的位置并转换成可用输出信号,z向位置传感器12安装在z向导轨10的两侧,输出相关位置信号,保证设备稳定性。
27.如图1和图2所示,本优选实施中,还有三套拧紧轴机构分别通过导向连接块6、导向连接块16及导向连接块19直接与主体框架2连接:一套导向连接块6与主体框架2相连,伺服拧紧轴7与导向连接块6相连。
28.拧紧轴机构包括伺服拧紧轴7和拧紧浮动套筒8,拧紧浮动套筒8与伺服拧紧轴7 相连,防止拧紧轴7卡轴的现象,可以满足螺栓
±
2mm的偏移量。
29.本实施例中,机器人连接轴1与主体框架2的连接方式为紧固件连接。
30.视觉检测模块17用于检测拧紧浮动套筒8的位置度并反馈给机器人及plc作出相应理论和实际偏差量的调整,视觉检测范围,最大检测范围:295mm*220mm,用于解决螺栓位置度不准确的问题项。
31.如图1和图2所示,平衡块18固定在主体框架2的另一侧,用于平衡设备重心,提高机器人工作效率,减小机器人负载,延长机器人使用寿命。
32.本实用新型可以解决高节拍、高产能的汽车焊装生产线的自动拧紧问题,通过切换轨道、拧紧机构、视觉检测等解决多车型柔性拧紧功能,通过柔性导轨系统进行拧紧轴机构的位移切换,解决多车型适配问题。
33.在本实施例中,本实用新型主要的应用过程如下:
34.视觉检测模块17安装于主体框架2的机器人连接轴1一侧,可以方便的通过视觉检测模块17中的设想对拧紧浮动套筒和螺栓的位置拍照;
35.对视觉检测模块17拍摄图像进行理论位置和实际位置的误差分析,获取误差;本实施例中,误差为理论位置和实际位置的偏移量;
36.判断误差是否大于阈值,本实施例中,阈值为偏移量4mm;当偏移量大于4mm时,调整拧紧浮动套筒8的位置,然后重新拍照,侧偏移量,判断便宜量是否超过4mm;当偏移量不大于4mm时,则拧紧浮动套筒8对螺栓进行最终拧紧并进行扭矩值反馈。
37.在上述过程中,本实施例调整拧紧浮动套筒8位置包括以下流程:
38.待拧紧的车身到位进行车型检查;
39.阀岛模块13接收信号做出调整指令;
40.滑移气缸根据指令调整气缸行程位置;
41.位置传感器进行位置检测并返回信号;
42.视觉检测模块17将偏移量信号形成误差信号;
43.系统连接的机器人计算进行补偿,消除实际偏移量;
44.系统连接的机器人进行最终拧紧作业。
45.本方法将原有的人工拧紧方案改成成自动拧紧方案,减少人工投入;将原有单轴拧紧系统替换成集成式的多轴拧紧,大大节约了拧紧时间;同时在伺服拧紧轴上面增加了视觉检测模块,通过视觉检测来纠正理论和实际的偏差量,从而减少拧紧轴的故障率。
46.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术无需创造性劳动就可以根据本实用新型的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1