用于激光电弧焊接过程的工件稳定工装的制作方法
1.本实用新型涉及激光焊接技术领域,具体是用于激光电弧焊接过程的工件稳定工装。
背景技术:
2.激光焊接是利用高能量密度的激光束作为热源的一种高效精密焊接方法。激光焊接是激光材料加工技术应用的重要方面之一。20世纪70年代主要用于焊接薄壁材料和低速焊接,焊接过程属热传导型,即激光辐射加热工件表面,表面热量通过热传导向内部扩散,通过控制激光脉冲的宽度、能量、峰值功率和重复频率等参数,使工件熔化,形成特定的熔池。由于其独特的优点,已成功应用于微、小型零件的精密焊接中。
3.在对工件进行激光焊接之前,需要先将工件固定在工作台上,但现有的工件固定装置一般是首先从侧面对工件进行夹持,然后从工件的上方对工件向下按压,从而能够对工件从侧面和上下方向进行固定,但从上方对工件进行向下按压时,按压装置会占用一部分工件的上表面,进而会影响激光焊接头对工件进行焊接,容易影响焊接头在工件上的焊接操作;为此,我们提供了用于激光电弧焊接过程的工件稳定工装解决以上问题。
技术实现要素:
4.本实用新型的目的就是为了弥补现有技术的不足,提供了用于激光电弧焊接过程的工件稳定工装。
5.为实现上述目的,本实用新型提供如下技术方案:用于激光电弧焊接过程的工件稳定工装,包括焊接平台,所述焊接平台的上方安装有激光焊接头本体,所述焊接平台的内部放置有待加工的工件本体,所述焊接平台的内部设有两个相对称的侧面夹持限位机构,所述焊接平台的底面固定连接有两个相对称的支撑板,两个所述支撑板之间固定连接有连接条,所述连接条的上方设有移动机构,所述移动机构包括开设在连接条上表面的凹槽,所述凹槽的内部转动连接有双向螺杆,所述双向螺杆的外表面螺纹连接有两个相对称的移动块,每个所述移动块的上端均铰接有铰接板,所述移动机构的上方设有上下固定机构,所述上下固定机构包括箱体,所述箱体的内部滑动连接有升降板,所述升降板的底面固定连接有升降杆,所述升降杆贯穿箱体并与箱体滑动连接,每个所述铰接板的上端均与升降杆的底端相铰接。
6.进一步的,所述凹槽的内壁固定连接有电机,所述电机的输出转轴与双向螺杆的一端转动连接,电机开启转动能够带动双向螺杆转动。
7.进一步的,所述箱体的上表面固定连通有等距离排列的连通管,每个所述连通管远离箱体的一端均固定连通有锥形口,所述锥形口与焊接平台的底面固定连接,通过连通管和锥形口的设置能够将箱体内部与焊接平台的上方相连通。
8.进一步的,所述侧面夹持限位机构包括固定连接在焊接平台内壁的电动推杆,所述电动推杆的伸缩端固定连接有夹持板,电动推杆开启伸长能够带动夹持板移动,能够对
工件本体进行夹持固定。
9.进一步的,所述箱体的外表面固定连接有两个相对称的连接杆,每个所述连接杆远离箱体的一端均与焊接平台的底面固定连接,通过连接杆的设置能够对箱体进行固定。
10.进一步的,所述焊接平台的底面开设有等距离排列的通孔,所述通孔贯穿焊接平台,通孔方便锥形口与焊接平台的上方相连通,锥形口共有三个,且通孔为三个。
11.进一步的,所述锥形口与通孔的内部相连通,所述锥形口为橡胶材质,锥形口容易产生形变。
12.与现有技术相比,该用于激光电弧焊接过程的工件稳定工装具备如下有益效果:
13.1、本实用新型通过焊接平台、激光焊接头本体、工件本体、侧面夹持限位机构、支撑板、上下固定机构、连接条和移动机构的配合设计,能够对工件本体进行上下方向的固定,能够避免现有的固定装置占用工件本体的上表面,不会妨碍激光焊接头本体对工件本体进行焊接操作。
14.2、本实用新型通过电动推杆和夹持板的配合设计,电动推杆伸长时,能够带动夹持板移动,夹持板移动能够对工件本体从侧面进行夹持固定,通过连接杆的设置,方便对箱体进行固定。
附图说明
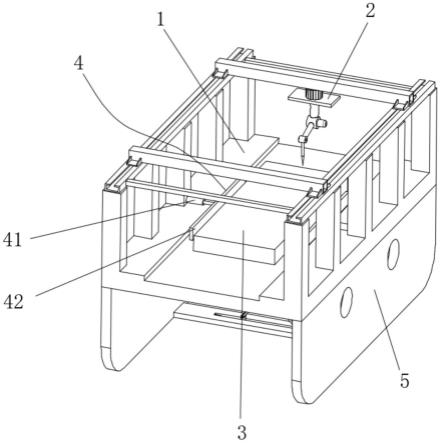
15.图1为本实用新型立体结构示意图;
16.图2为本实用新型上下固定机构和移动机构立体结构示意图;
17.图3为本实用新型焊接平台下方立体结构示意图;
18.图4为本实用新型图3中a处结构放大示意图。
19.图中:1、焊接平台;2、激光焊接头本体;3、工件本体;4、侧面夹持限位机构;41、电动推杆;42、夹持板;5、支撑板;6、上下固定机构;61、箱体;62、连接杆;63、连通管;64、锥形口;65、升降板;66、升降杆;7、连接条;8、移动机构;81、凹槽;82、电机;83、双向螺杆;84、移动块;85、铰接板。
具体实施方式
20.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
21.本实施例提供了用于激光电弧焊接过程的工件稳定工装,该装置通过侧面夹持限位机构4、支撑板5、上下固定机构6、连接条7和移动机构8的配合设计,能够对工件本体3进行上下方向的固定,能够避免现有的固定装置占用工件本体3的上表面,不会妨碍激光焊接头本体2对工件本体3进行焊接操作。
22.参见图1,用于激光电弧焊接过程的工件稳定工装,包括焊接平台1,焊接平台1的上方安装有激光焊接头本体2,激光焊接头本体2是一种使用高能量密度激光头光束作为热源的高效精确焊接方法,在激光头光照射下,由于光能的吸收,局部温度迅速上升,当功率密度合适时,部分照射部分中的金属达到熔点但不蒸发,在熔融金属冷却并凝固后,将两部分材料焊接在一起,为现有技术,且已经为现有较为成熟的装置,本技术中不再进行过多赘述。
23.焊接平台1的内部放置有待加工的工件本体3,焊接平台1的内部设有两个相对称的侧面夹持限位机构4,侧面夹持限位机构4包括固定连接在焊接平台1内壁的电动推杆41,电动推杆41同样为现有装置,电动推杆41与外部控制器电连接,且通过外部控制器,能够控制电动推杆41的伸缩,电动推杆41的伸缩端固定连接有夹持板42,当电动推杆41伸缩时,能够带动夹持板42移动,进而能够对工件本体3进行侧面的夹持,能够对工件本体3进行限位,防止工件本体3出现侧方向的位移。
24.参见图2和图4,焊接平台1的底面固定连接有两个相对称的支撑板5,两个支撑板5之间固定连接有连接条7,支撑板5的设置方便对连接条7进行固定,连接条7的上方设有移动机构8,移动机构8包括开设在连接条7上表面的凹槽81,凹槽81的内部转动连接有双向螺杆83,双向螺杆83的外表面螺纹连接有两个相对称的移动块84,当移动块84转动时,能够带动两个移动块84同步反向进行移动,每个移动块84的上端均铰接有铰接板85,当两个移动块84同步反向进行移动时,能够带动两个铰接板85进行角度的调节。
25.凹槽81的内壁固定连接有电机82,电机82作为本技术中的动力源,为现有技术,本技术中不再对电机82的型号等做过多叙述,其可被其他动力源进行替换,电机82的输出转轴与双向螺杆83的一端转动连接,电机82与外部控制器电连接,当电机82开启旋转时,能够带动双向螺杆83转动。
26.参见图2,移动机构8的上方设有上下固定机构6,上下固定机构6包括箱体61,箱体61的内部滑动连接有升降板65,升降板65的外表面固定连接有一圈橡胶圈,能够增强升降板65与箱体61之间的密封性,升降板65的底面固定连接有升降杆66,升降杆66贯穿箱体61并与箱体61滑动连接,升降杆66上下移动时,能够带动升降板65上下移动,每个铰接板85的上端均与升降杆66的底端相铰接。
27.箱体61的上表面固定连通有等距离排列的连通管63,每个连通管63远离箱体61的一端均固定连通有锥形口64,锥形口64与焊接平台1的底面固定连接,通过连通管63和锥形口64的设置,能够使箱体61内部与焊接平台1的上方相连通,箱体61的外表面固定连接有两个相对称的连接杆62,每个连接杆62远离箱体61的一端均与焊接平台1的底面固定连接,连接杆62为l状,连接杆62的设置能够对箱体61起到固定作用。
28.焊接平台1的底面开设有等距离排列的通孔,通孔贯穿焊接平台1,锥形口64与通孔的内部相连通,锥形口64为橡胶材质,当升降板65向下移动时,能够使工件本体3吸附在焊接平台1的内底壁,能够对工件本体3起到向下的力,进而能够对焊接平台1起到上下方向的固定。
29.工作原理:使用时,首先,将工件本体3放置在焊接平台1的内部,然后,通过外部控制器控制电动推杆41开启,电动推杆41伸长带动夹持板42移动,对工件本体3进行侧面方向的夹持固定,然后,再控制电机82开启,电机82开启旋转带动双向螺杆83旋转,双向螺杆83旋转带动两个移动块84同步向相反的方向移动,使两个移动块84向相互远离的方向移动,此时,两个铰接板85的下端均向两端进行移动,能够拉动升降杆66下降,升降杆66下降能够带动升降板65下降,能够使箱体61内部的气压降低,进而能够通过连通管63和升降板65将工件本体3吸附在焊接平台1的内底壁,能够对工件本体3进行上下方向的固定,能够避免现有的固定装置占用工件本体3的上表面,不会妨碍激光焊接头本体2对工件本体3进行焊接操作。
30.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1