栅栏用钢帽件智能双焊自动化线的制作方法
栅栏用钢帽件智能双焊自动化线
【技术领域】
1.本实用新型涉及焊接设备技术领域,具体涉及栅栏用钢帽件智能双焊自动化线。
背景技术:
2.栅栏用钢帽件包括钢帽,以及斜片。目前主要是通过人工取料,人工放料,最后人工将斜片焊接在钢帽上,生产效率低下,焊接前需要对位,又进一步拉低了生产效率。
技术实现要素:
3.为了解决现有栅栏用钢帽件的焊接效率低下的技术问题,本实用新型提供了栅栏用钢帽件智能双焊自动化线。
4.本实用新型是通过以下技术方案实现的:
5.栅栏用钢帽件智能双焊自动化线,包括焊接平台,用于往所述焊接平台上输送第一工件的第一自动送料机构,用于将第一工件限制在所述焊接平台的焊接位置上的焊接定位机构,以及第二自动送料机构,所述第二自动送料机构将第二工件输送至焊接位置上,以使第二工件与第一工件相接,所述焊接定位机构用于将第一工件和第二工件共同限制在焊接位置上。
6.如上所述的栅栏用钢帽件智能双焊自动化线,还包括用于将第一工件和第二工件焊接后形成的焊接件推离所述焊接平台的自动落料机构。
7.如上所述的栅栏用钢帽件智能双焊自动化线,所述自动落料机构包括与所述焊接平台连接并向下倾斜的斜平台,以及推动气缸,所述焊接定位机构解除对焊接件的限制后,所述推动气缸用于将焊接件从焊接位置推动至斜平台上,以使焊接件沿所述斜平台落下。
8.如上所述的栅栏用钢帽件智能双焊自动化线,所述第一自动送料机构包括用于放置第一工件的第一送料轨道,以及对应所述第一送料轨道出口设置的第一放料组件,所述第一放料组件用于使所述第一送料轨道中的第一工件逐个落入所述焊接平台中。
9.如上所述的栅栏用钢帽件智能双焊自动化线,所述第一送料轨道包括多个间隔设置的第一引导条,以及多个间隔设置的第一固定板,所述第一固定板与多个所述第一引导条固定连接,以使多个所述第一引导条之间形成供第一工件滑动的输送管道。
10.如上所述的栅栏用钢帽件智能双焊自动化线,所述第一放料组件包括对应所述第一送料轨道出口设置的第一限料气缸,以及设于所述焊接平台上并与所述第一送料轨道出口间隔设置的送料挡板,所述送料挡板与所述第一送料轨道出口间隔设置以形成用于容纳一第一工件的送料位置,所述焊接定位机构将第一工件从送料位置移动至焊接位置时,所述第一限料气缸限制所述第一送料轨道中的第一工件落入送料位置上。
11.如上所述的栅栏用钢帽件智能双焊自动化线,所述焊接定位机构包括设于所述焊接平台上的焊接挡板,以及用于将处于送料位置上的第一工件推动至抵压在焊接挡板上的定位气缸。
12.如上所述的栅栏用钢帽件智能双焊自动化线,所述第二自动送料机构包括送料通
道,第二工件与第一工件相接时,第二工件露出所述送料通道出口,以与第一工件进行焊接。
13.如上所述的栅栏用钢帽件智能双焊自动化线,所述第二自动送料机构还包括对应所述送料通道设置的第二放料组件,所述第二放料组件包括第一停止气缸和第二停止气缸,所述第一停止气缸与所述第二停止气缸间隔设置以使在两者之间容纳一第二工件。
14.如上所述的栅栏用钢帽件智能双焊自动化线,所述焊接定位机构包括工件挡板,以及用于驱动所述工件挡板的限位气缸,所述限位气缸用于驱动所述工件挡板覆盖在所述送料通道侧面上,以限制第二工件从所述送料通道侧面脱出,或用于驱动所述工件挡板脱离所述送料通道侧面,以使第二工件从所述送料通道侧面脱出。
15.与现有技术相比,本实用新型的有如下优点:
16.本实用新型的栅栏用钢帽件智能双焊自动化线,通过第一自动送料机构和第二自动送料机构自动输送第一工件和第二工件,从而取代人工取料放料的生产方式,通过焊接定位机构将第一工件和第二工件限制在焊接位置上,取代人工对位的生产方式,从而提高生产效率和焊接件的质量。本实用新型中提及的第一工件为钢帽,第二工件为斜片,焊接件为栅栏用钢帽件。
【附图说明】
17.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
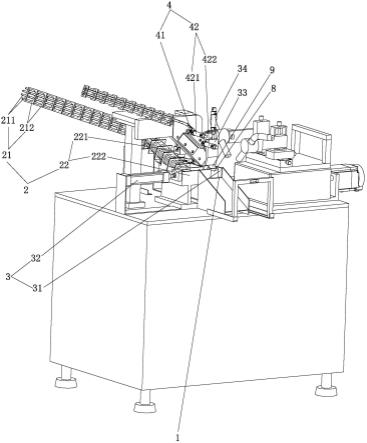
18.图1是本实施例的结构示意图一;
19.图2是本实施例的结构示意图二;
20.图3是本实施例的内部结构示意图。
【具体实施方式】
21.为了使本实用新型所解决的技术问题技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
22.请参阅图1至图3,栅栏用钢帽件智能双焊自动化线,包括焊接平台1,用于往所述焊接平台1上输送第一工件的第一自动送料机构2,用于将第一工件限制在所述焊接平台1的焊接位置上的焊接定位机构3,以及第二自动送料机构4,所述第二自动送料机构4将第二工件输送至焊接位置上,以使第二工件与第一工件相接,所述焊接定位机构3用于将第一工件和第二工件共同限制在焊接位置上。第一自动送料机构和第二自动送料机构在运送第一工件和第二工件的同时,解决了第一工件和第二工件在焊接前需要定位的问题,而焊接定位机构使得第一工件和第二工件保持当前定位,以便于后续进行焊接。所述焊接机构7对第一工件和第二工件进行焊接以形成的焊接件后,在焊接件被推出焊接位置时,所述第一自动送料机构2将第一工件输送至所述焊接平台1上。焊接件被自动落料机构推动进入斜平台。
23.本实用新型实施例的栅栏用钢帽件智能双焊自动化线,通过第一自动送料机构和第二自动送料机构自动输送第一工件和第二工件,从而取代人工取料放料的生产方式,通过焊接定位机构将第一工件和第二工件限制在焊接位置上,取代人工对位的生产方式,从而提高生产效率和焊接件的质量。本实用新型中提及的第一工件为钢帽,第二工件为斜片,焊接件为栅栏用钢帽件。
24.进一步地,作为本方案的优选实施方式而非限定,还包括用于将第一工件和第二工件焊接后形成的焊接件推离所述焊接平台1的自动落料机构5。
25.进一步地,作为本方案的优选实施方式而非限定,所述自动落料机构5包括与所述焊接平台1连接并向下倾斜的斜平台51,以及推动气缸52,所述焊接定位机构3解除对焊接件的限制后,所述推动气缸52用于将焊接件从焊接位置推动至斜平台51上,以使焊接件沿所述斜平台51落下。
26.进一步地,作为本方案的优选实施方式而非限定,所述焊接定位机构3包括设于所述焊接平台1上的焊接挡板31,以及用于将处于送料位置上的第一工件推动至抵压在焊接挡板31上的定位气缸32。
27.栅栏用钢帽件智能双焊自动化线,包括用于对位于所述焊接位置上的第一工件和第二工件进行焊接的焊接机构5。
28.进一步地,作为本方案的优选实施方式而非限定,所述焊接机构7包括移动平台71,设于所述移动平台71上的第一焊枪72和第二焊枪73,以及用于驱动所述移动平台71往靠近或远离所述焊接平台1方向移动和焊接移动的伺服电机移动机构74。当第一工件8和第二工件9均处于焊接位置上时,伺服电机移动机构驱动移动平台移动,从而带动第一焊枪和第二焊枪,移动至焊接位置上,然后进行焊接移动,对第一工件与第二工件进行焊接,以形成焊接件。焊接移动即为沿焊接缝的路径移动。
29.进一步地,作为本方案的优选实施方式而非限定,所述焊接机构7还包括调节所述第一焊枪72和所述第二焊枪73位置的调节机构6。调节机构包括横向调节功能,纵向调节功能,高度调节功能和旋转调节功能,使得第一焊枪和第二焊枪对应第一工件和第二工件相接处的两侧。
30.进一步地,作为本方案的优选实施方式而非限定,所述第一自动送料机构2包括用于放置第一工件的第一送料轨道21,以及对应所述第一送料轨道21出口设置的第一放料组件22,所述第一放料组件22用于使所述第一送料轨道21中的第一工件逐个落入所述焊接平台1中。
31.进一步地,作为本方案的优选实施方式而非限定,所述第一送料轨道21包括多个间隔设置的第一引导条211,以及多个间隔设置的第一固定板212,所述第一固定板212与多个所述第一引导条211固定连接,以使多个所述第一引导条211之间形成供第一工件滑动的输送管道213。利用重量的作用,使得进入输送管道中的第一工件顺着第一引导条的长度方向移动到送料位置上。本实施例的第一引导条在水平方向上呈90度弯曲,从而减缓第一工件落下的速度。
32.进一步地,作为本方案的优选实施方式而非限定,所述第一放料组件22包括对应所述第一送料轨道21出口设置的第一限料气缸221,以及设于所述焊接平台1上并与所述第一送料轨道21出口间隔设置的送料挡板222,所述送料挡板222与所述第一送料轨道21出口
间隔设置以形成用于容纳一第一工件的送料位置,所述焊接定位机构3将第一工件从送料位置移动至焊接位置时,所述第一限料气缸221限制所述第一送料轨道21中的第一工件落入送料位置上。当需要送料时,第一限料气缸缩入,排在输送管道中第一个的第一工件落入送料位置,受送料挡板的限制,后面的第二个第一工件被阻碍脱出输送管道,此时第一限料气缸伸出,将第二个第一工件限制,第一个第一工件从送料位置移动至焊接位置并进行焊接后,第一限料气缸缩入,落下下一个第一工件。
33.进一步地,作为本方案的优选实施方式而非限定,所述第二自动送料机构4包括送料通道41,第二工件与第一工件相接时,第二工件露出所述送料通道41出口,以与第一工件进行焊接。送料通道使得第二工件与第一工件的接触位置为焊接位置,无需再进行焊接前的定位,提高工作效率。送料通道倾斜向下设置,位于出口处的第二工件在送料通道和焊接定位机构的作用下,仅能沿送料通道的长度方向移动,即焊接机构在焊接时,不会造成第二工件的移动,送料通道达到限位的效果。
34.进一步地,作为本方案的优选实施方式而非限定,所述第二自动送料机构4还包括对应所述送料通道41设置的第二放料组件42,所述第二放料组件42包括第一停止气缸421和第二停止气缸422,所述第一停止气缸421与所述第二停止气缸422间隔设置以使在两者之间容纳一第二工件。
35.进一步地,作为本方案的优选实施方式而非限定,所述焊接定位机构3包括工件挡板33,以及用于驱动所述工件挡板33的限位气缸34,所述限位气缸34用于驱动所述工件挡板33覆盖在所述送料通道41侧面上,以限制第二工件从所述送料通道41侧面脱出,或用于驱动所述工件挡板33脱离所述送料通道41侧面,以使第二工件从所述送料通道41侧面脱出。由于斜片的形状和其上的焊接位置影响,斜片难以直接放置在钢帽上,故采用送料通道和工件挡板的限位方式,固定斜片的焊接时的位置。工件挡板移出送料通道后,焊接件能够顺利出送料通道。
36.本实施例的工作原理如下:
37.本实用新型实施例的栅栏用钢帽件智能双焊自动化线,通过焊接定位机构将第一工件和第二工件限制在焊接位置上,然后通过焊接机构对第一工件和第二工件进行焊接,取代人工对位和焊接的生产方式,从而提高生产效率和焊接件的质量。本实用新型中提及的第一工件为钢帽,第二工件为斜片,焊接件为栅栏用钢帽件。
38.如上是结合具体内容提供的实施方式,并不认定本技术的具体实施只局限于这些说明。凡与本技术的方法结构等近似雷同,或是对于本技术构思前提下做出若干技术推演或替换,都应当视为本技术的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1