一种焊接协作机器人用连接法兰的制作方法
1.本实用新型涉及焊接设备技术领域,具体为一种焊接协作机器人用连接法兰。
背景技术:
2.近年来,在自动焊领域,协作机器人得到越来越多的应用。协作机器人,顾名思义,就是在机器人与人可以在生产线上协同作战,充分发挥机器人的效率及人类的智能。这种机器人不仅性价比高,而且安全方便,能够极大地促进制造企业的发展。对于机器人焊接作业中,无论是编程简单的三轴臂还是可以实现精密作业的十轴臂以上的协作机器人,要实现安装快捷、部署灵活,都离不开作业前端设备-自动焊枪的连接法兰。现有法兰结构只能将焊枪固定于协作机器人上,不能按需调整焊枪与工作台空间等。换言之,部署的灵活性会受到很大的影响,也会无形中有损于人机协作的安全性。
技术实现要素:
3.本实用新型的目的在于提供一种焊接协作机器人用连接法兰,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种焊接协作机器人用连接法兰,包括连接座,所述连接座的两端分别设有圆形凸缘和安装箍环,所述圆形凸缘上设有贯穿的一个第一中心安装孔和多个通孔,所述第一中心安装孔和多个通孔均为圆形台阶孔,多个所述通孔沿着第一中心安装孔的边缘均匀排列,所述安装箍环的中间开设有第二中心安装孔,所述第二中心安装孔的远离连接座的侧边开设有箍环间隙,所述箍环间隙将安装箍环分割为两个半片箍环,两个所述半片箍环的靠近箍环间隙端均设有至少一个相互对应的锁紧孔。
5.进一步优选,所述连接座、圆形凸缘和安装箍环为一体铸造成型结构,所述连接座和圆形凸缘之间的角度为平角,所述圆形凸缘和安装箍环之间的角度为钝角,保证焊枪与协作机器人的末端执行器以特定角度安装,便于焊枪的焊接作业。
6.进一步优选,所述通孔和锁紧孔上均盖设有保护盖,防止有灰尘或其他杂物掉进通孔和锁紧孔内。
7.进一步优选,所述圆形凸缘的远离第一中心安装孔台阶面的侧面设有环形槽,用于圆形凸缘的安装定位;多个所述通孔均贯穿环形槽,所述圆形凸缘的靠近连接座的端设有第一安装槽,用于盖板的安装;所述第一安装槽设置于圆形凸缘的靠近第一中心安装孔台阶面的侧面,所述第一安装槽内设有贯穿圆形凸缘的定位孔,所述定位孔和通孔的轴向相同,定位孔用于定位销的安装。
8.进一步优选,所述定位孔内穿设有定位销,用于圆形凸缘安装时的定位;所述第一安装槽内设有盖板,所述盖板盖设于定位孔上,用于遮挡定位孔和定位销,提高该连接法兰的外观美观性。
9.进一步优选,所述安装箍环的靠近环形槽的侧面设有定位凸起,所述定位凸起设
置于安装箍环的靠近连接座端,通过定位凸起实现安装箍环上架设的焊枪的安装定位。
10.进一步优选,两个所述半片箍环中的其中一个的外侧面设有第二安装槽,所述第二安装槽内设有铭牌,通过铭牌实现该连接法兰的名称、材质和型号等参数信息的展示。
11.进一步优选,所述锁紧孔连接有螺栓,通过螺栓实现对第二中心安装孔的孔径的调节,实现对安装的焊枪的锁紧。
12.有益效果:本实用新型的焊接协作机器人用连接法兰,通过圆形凸缘实现和协作机器人的末端执行器相连接,通过安装箍环实现焊枪的安装,协作机器人通过连接法兰实现驱动焊枪进行焊接作业,可满足普通焊枪与协作机器人的连接;第二中心安装孔的孔径能够改变,可以适应不同直径尺寸的焊枪,提高该连接法兰的使用灵活性和适用性;通过锁紧孔实现焊枪的锁紧,保证焊枪在移动和使用过程中的稳定性;通过多个通孔的设置,能够连接转接法兰,对焊接作业终端部署予以扩张,提高了自动焊现场的适用性与灵活性,并促进人机协作安全性的增强,解决现有法兰无法按需调整焊枪和工作台空间的问题。
附图说明
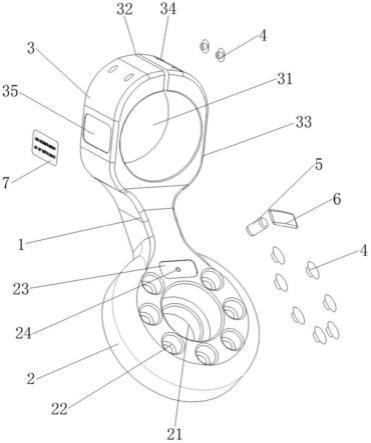
13.图1为本实用新型实施例所公开的焊接协作机器人用连接法兰的分解结构示意图;
14.图2为本实用新型实施例所公开的焊接协作机器人用连接法兰的一个视角轴测结构示意图;
15.图3为本实用新型实施例所公开的焊接协作机器人用连接法兰的另一个视角轴测结构示意图;
16.图4为本实用新型实施例所公开的焊接协作机器人用连接法兰的主视结构示意图;
17.图5为本实用新型实施例所公开的焊接协作机器人用连接法兰的右视结构示意图。
18.附图标记:1-连接座,2-圆形凸缘,21-第一中心安装孔,22-通孔,23-第一安装槽,24-定位孔,25-环形槽,3-安装箍环,31-第二中心安装孔,32-箍环间隙,33-半片箍环,34-锁紧孔,35-第二安装槽,36-定位凸起,4-保护盖,5-定位销,6-盖板,7-铭牌。
具体实施方式
19.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
20.如图1-5所示,一种焊接协作机器人用连接法兰,包括连接座1,连接座1的两端分别设有圆形凸缘2和安装箍环3,其中,连接座1、圆形凸缘2和安装箍环3为一体铸造成型结构,连接座1和圆形凸缘2之间的角度为平角,圆形凸缘2和安装箍环3之间的角度为钝角,连接座1用于增加圆形凸缘2和安装箍环3之间间距,圆形凸缘2用于和协作机器人的末端执行器相连接,安装箍环3用于焊枪的安装,协作机器人通过连接法兰实现驱动焊枪进行焊接作业。
21.本技术中,圆形凸缘2上设有贯穿的一个第一中心安装孔21和多个通孔22,第一中心安装孔21和多个通孔22均为圆形台阶孔,多个通孔22沿着第一中心安装孔21的边缘均匀
排列,第一中心安装孔21实现了圆形凸缘2和协作机器人的末端执行器端接。通孔22为预留孔,用于在需要时接入转接法兰,提高对协作机器人末端轴径的适用性。安装箍环3的中间开设有第二中心安装孔31,用于焊枪的支撑、固定;第二中心安装孔31的远离连接座1的侧边开设有箍环间隙32,箍环间隙32将安装箍环3分割为两个半片箍环33,通过箍环间隙32的设置,使得分割的两个半片箍环33之间的第二中心安装孔31的孔径能够改变,可以适应不同直径尺寸的焊枪,提高该连接法兰的使用灵活性和适用性;两个半片箍环33的靠近箍环间隙32端均设有至少一个相互对应的锁紧孔34,锁紧孔34连接有螺栓,通过螺栓实现将插入在第二中心安装孔31内的焊枪锁紧,保证焊枪在移动和使用过程中的稳定性。
22.本技术中,通孔22和锁紧孔34上均盖设有保护盖4,防止有灰尘或其他杂物掉进通孔22和锁紧孔34内。
23.本技术中,圆形凸缘2的远离第一中心安装孔21台阶面的侧面设有环形槽25,通过环形槽25的设置,实现圆形凸缘2与协作机器人的末端执行器的定位,保证该连接法兰的安装位置准确;多个通孔22均贯穿环形槽25,作为预留孔,用于转接法兰的连接;圆形凸缘2的靠近连接座1的端设有第一安装槽23,第一安装槽23设置于圆形凸缘2的靠近第一中心安装孔21台阶面的侧面,即设置于圆形凸缘2的前面,第一安装槽23内设有贯穿圆形凸缘2的定位孔24,定位孔24和通孔22的轴向相同,均前后贯穿圆形凸缘2。其中,定位孔24内穿设有定位销5,用于圆形凸缘2在安装时的定位,定位销5配合环形槽25能够确保该连接法兰的安装位置精准;第一安装槽23内设有盖板6,盖板6盖设于定位孔24上,防止定位孔24和定位销5漏出影响美观。盖板6可以为塑胶产品,也可以为金属材料制成,通过胶黏的方式固定于第一安装槽23内。
24.本技术中,安装箍环3的靠近环形槽25的侧面设有定位凸起36,定位凸起36设置于安装箍环3的靠近连接座1端,通过定位凸起36的设置,可实现焊枪在安装箍环3上的安装、定位,保证焊枪的安装准确。
25.本技术中,两个半片箍环33中的其中一个的外侧面设有第二安装槽35,第二安装槽35内设有铭牌7,用于记录该连接法兰的名称、材质和型号等参数信息。
26.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型性的保护范围之内的实用新型内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1